多轴协调运动指令
多轴协调运动指令用于在坐标系统中移动多达六个轴。
可用指令
梯形图和结构化文本
功能块
不可用
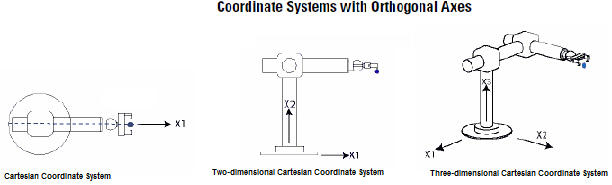
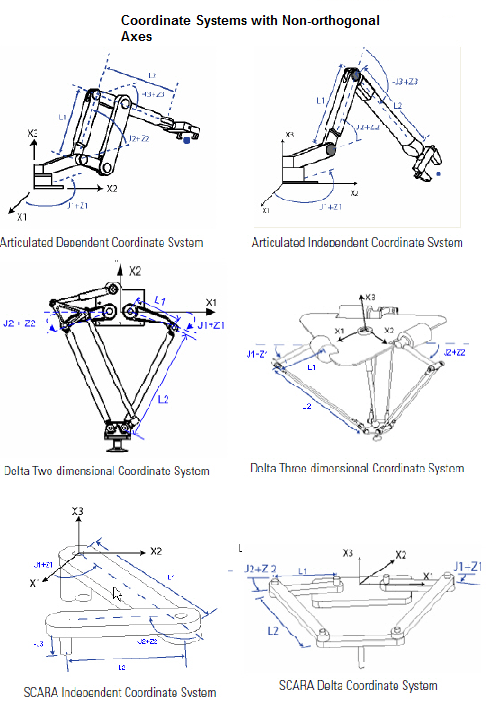
坐标系统示例如下:
 |
 |
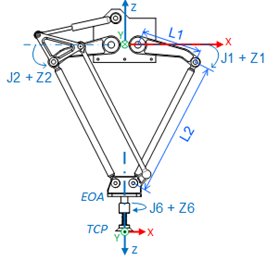 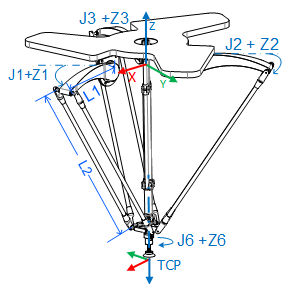 Delta J1J2J6 坐标系统 Delta J1J2J3J6 坐标系统 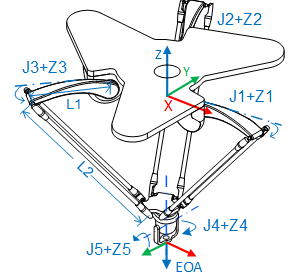 Delta J1J2J3J4J5 坐标系统 |
多轴协调运动指令包括:
若: | 使用此指令: |
|---|---|
停止坐标系统的轴或取消变换。 | MCS |
在笛卡尔坐标系统中针对指定轴启动一维或多维直线协调运动。 | MCLM |
在笛卡尔坐标系统中针对指定轴启动二维或三维圆弧协调运动。 | MCCM |
在指定坐标系统中针对活动的协调运动启动路径动态变化。 | MCCD |
针对指定坐标系统中所有轴上执行受控关闭操作。 | MCSD |
将指定坐标系统中的所有轴从关闭状态复位到轴就绪状态,并清除轴故障。 | MCSR |
启动将两个坐标系统连接在一起的变换。 该指令仅能在支持的控制器上使用。 | MCT |
计算一个坐标系统相对于另一个坐标系统的位置。 该指令仅能在支持的控制器上使用。 | MCTP |
定义主轴与坐标系统之间的主从关系。在从坐标系统上执行的协调运动指令 MCLM 和 MCCM 将与主轴同步。 | MDCC |
计算一个坐标系统中的点在另一个坐标系统中等效点的位置。 | MCTPO |
在笛卡尔坐标系统中针对指定轴启动多维协调路径运动。 | MCPM |
启动一个变换,将两个坐标系统与姿态控制连接在一起。 | MCTO |
混合指令时使用不同的终止类型
混合两个 MCLM 或 MCCM 指令时,首先启动第一个指令,并将第二个指令放入队列。在坐标系统的标签中,提供两个位用于指令排队。
- MovePendingStatus
- MovePendingQueueFullStatus
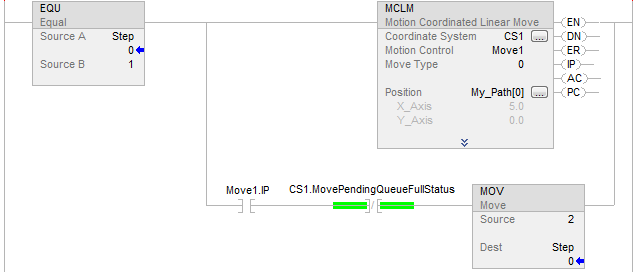
例如,下面的梯形图使用坐标系统 cs1 将 Move1 混合到 Move2 中。
混合指令梯形图示例
如果 Step = 1,则
Move1 启动并将轴移动到 (5, 0) 位置
当 Move1 执行期间
便有空间供另一个运动排入队列
Step=2
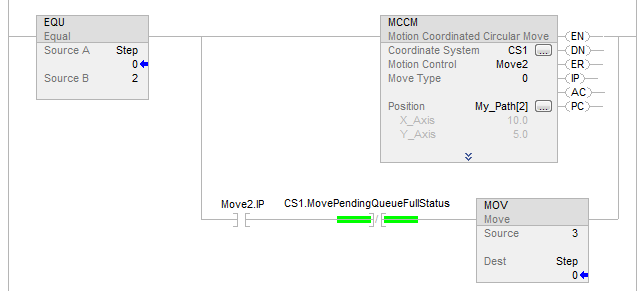
如果 Step = 2,则
Move1 已在执行。
Move2 进入队列,等待 Move1 完成。
Move1 完成后,Move2 将轴移动到 (10, 5) 位置。
在 Move2 执行期间,队列中有空间:
Step = 3。
当指令完成时,将其从队列中移除并腾出空间,以便另一个指令进入队列。两个位的值始终相同,因为队列中每次只能有一个等待处理的指令。如果应用程序需要依次执行多个指令,可使用下列参数来设置位。
位参数
条件 | 则 |
|---|---|
一条指令已激活,而另一条指令在队列中等待处理。 |
|
活动指令完成并离开队列。 |
|
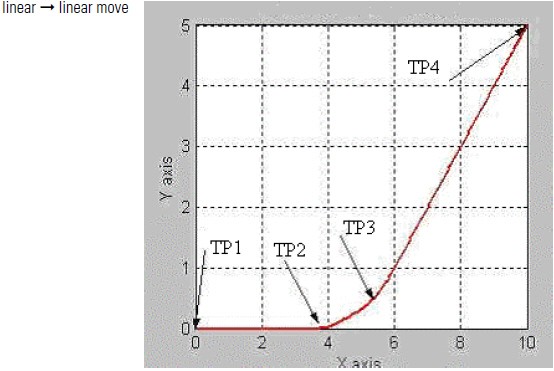
MCLM 或 MCCM 指令的终止类型操作数指定当前执行的运动的终止方式。这些示意图显示了在各转换点 (TP) 受影响的指令位和坐标系统位的状态。
使用“实际公差”或“不进入稳态”终止类型时混合运动在转换点的位状态
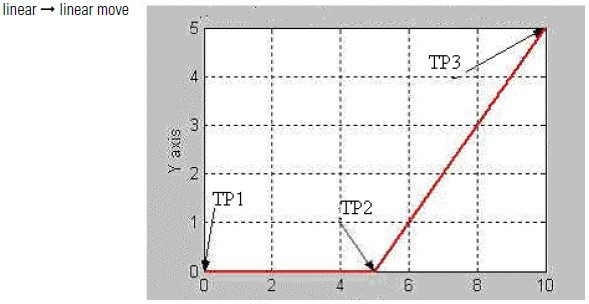
下表显示了上图中终止类型为“实际公差”或“不进入稳态”时各转换点的位状态。
位 | TP1 | TP2 | TP3 |
|---|---|---|---|
Move1.DN | T | T | T |
Move1.IP | T | F | F |
Move1.AC | T | F | F |
Move1.PC | F | T | T |
Move2.DN | T | T | T |
Move2.IP | T | T | F |
Move2.AC | F | T | F |
Move2.PC | F | F | T |
cs1.MoveTransitionStatus | F | F | F |
cs1.MovePendingStatus | T | F | F |
cs1.MovePendingQueueFullStatus | T | F | F |
使用“不减速”终止类型时混合运动在转换点的位状态
下表显示了上图中终止类型为“不减速”时各转换点的位状态。对于“不减速”终止类型,转换点 TP2 的待行距离等于 Move1 指令的减速距离。如果 Move 1 和 Move 2 共线,则 Move1.PC 在 TP3(第一个运动的设定终点)处为真。
位 | TP1 | TP2 | TP3 | TP4 |
|---|---|---|---|---|
Move1.DN | T | T | T | T |
Move1.IP | T | F | F | F |
Move1.AC | T | F | F | F |
Move1.PC | F | T | T | T |
Move2.DN | T | T | T | T |
Move2.IP | T | T | T | F |
Move2.AC | F | T | T | F |
Move2.PC | F | F | F | T |
cs1.MoveTransitionStatus | F | T | F | F |
cs1.MovePendingStatus | T | F | F | F |
cs1.MovePendingQueueFullStatus | T | F | F | F |
使用“给定公差”终止类型时混合运动在转换点的位状态
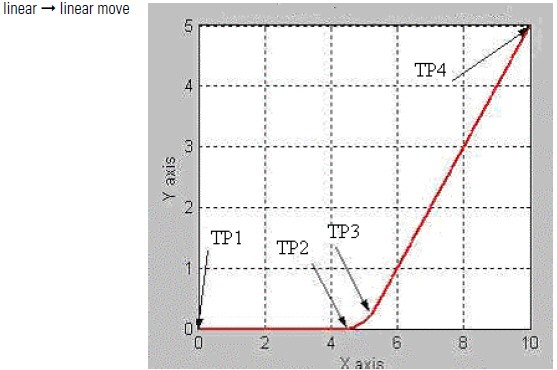
下表显示了上图中终止类型为“给定公差”时各转换点的位状态。对于“给定公差”终止类型,转换点 TP2 的待行距离等于坐标系统 cs1 的给定公差。
位 | TP1 | TP2 | TP3 | TP4 |
|---|---|---|---|---|
Move1.DN | T | T | T | T |
Move1.IP | T | F | F | F |
Move1.AC | T | F | F | F |
Move1.PC | F | T | T | T |
Move2.DN | T | T | T | T |
Move2.IP | T | T | T | F |
Move2.AC | F | T | T | F |
Move2.PC | F | F | F | T |
cs1.MoveTransitionStatus | F | T | F | F |
cs1.MovePendingStatus | T | F | F | F |
cs1.MovePendingQueueFullStatus | T | F | F | F |
使用“跟随轮廓速度受限”或“跟随轮廓速度不受限”终止类型时混合运动在转换点的位状态
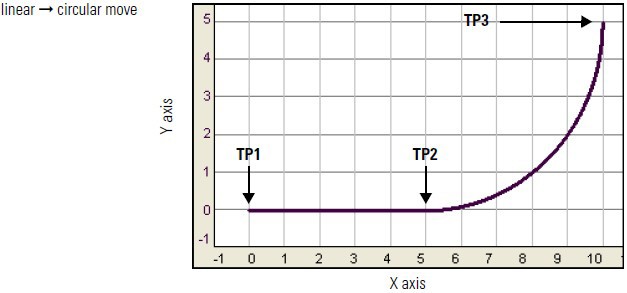
下表显示了转换点处的位状态。
位 | TP1 | TP2 | TP3 |
|---|---|---|---|
Move1.DN | T | T | T |
Move1.IP | T | F | F |
Move1.AC | T | F | F |
Move1.PC | F | T | T |
Move2.DN | T | T | T |
Move2.IP | T | T | F |
Move2.AC | F | T | F |
Move2.PC | F | F | T |
cs1.MoveTransitionStatus | F | F | F |
cs1.MovePendingStatus | T | F | F |
cs1.MovePendingQueueFullStatus | T | F | F |
提供反馈