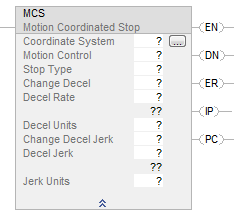
运动协调停止 (MCS)
此信息适用于
CompactLogix
5370、ControlLogix
5570、Compact GuardLogix
5370、GuardLogix
5570、Compact GuardLogix
5380、CompactLogix
5380、ControlLogix
5580、GuardLogix
5580 和 ControlLogix 5590 控制器。运动协调停止 (MCS) 指令用于启动协调运动的受控停止。所有待处理的运动曲线都将取消。
重要提示:
用于指令运动控制属性的标签只能使用一次。在其他指令中重复使用运动控制标签可能导致意外操作,从而可能造成设备损坏或人员受伤。
重要提示:
速度和/或结束位置过冲的风险
如果通过任意方法动态更改运动参数,即通过更改运动动态(MCD 或 MCCD)或在上一条指令完成前启动新指令,请注意存在速度和/或结束位置过冲的风险。
如果在运动减速或接近减速点时最大减速度减小,则梯形速度曲线可能会过冲。
而在下列情况下,S 形速度曲线可能会过冲:
- 如果在运动减速或接近减速点时最大减速度减小;或者
- 最大加速急动度减小,且轴正在加速。但要记住,如果急动度以时间百分比的形式指定,则可间接更改。
架构 | 标准 | 安全 |
|---|---|---|
CompactLogix 5370、ControlLogix 5570、Compact GuardLogix 5370 和 GuardLogix 5570 控制器 | 是 | 否 |
Compact GuardLogix 5380、CompactLogix 5380、ControlLogix 5580、GuardLogix 5580 和 ControlLogix 5590 控制器 | 是 | 否 |
可用语言
梯形图
功能块
此指令不可用于功能块中。
结构化文本
MCS(CoordinateSystem, MotionControl,StopType, ChangeDecel, DecelRate,DecelUnits, ChangeDecelJerk,DecelJerk, JerkUnits);
操作数
指令中混用数据类型时,需遵从相关的数据转换规则。请参阅 数据转换。
梯形图和结构化文本
操作数 | 类型 | 格式 | 说明 | |
|---|---|---|---|---|
Coordinate System | COORDINATE_SYSTEM | 标签 | 坐标系统的名称。 对坐标系统的引用。对于支持 REF_TO 运动数据类型的控制器,坐标系统操作数类型可以替换为 REF_TO_COORDINATE_SYSTEM 类型。 | |
Motion Control | MOTION_INSTRUCTION | 标签 | 指令的控制标签。 | |
Stop Type | DINT | 立即数 | 如果希望 | Choose this Stop Type |
Stop all motion for the axes of the coordinate system and stop any transform that the coordinate system is a part of. | 所有 (0) - 对于每个轴,当计算要在“减速”中使用的初始动力学参数(即加速度和速度)时,所有运动发生器(包括协调运动)都将考虑在内。坐标系统中的每个轴都使用计算出的初始动力学参数单独停止。 | |||
Stop only coordinated moves. | 协调运动 (2) | |||
Cancel any transform that the coordinate system is a part of. | 协调变换 (3) | |||
Change Decel(1) | DINT | 立即数 | 如果希望 | Then Choose |
Use the maximum deceleration rate of the coordinate system. | 否 (0) | |||
Specify the deceleration rate. | 是 (1) | |||
Decel Rate | REAL | 立即数或标签 |
重要提示:
如果在运动过程中减小减速度,轴可能会超出其目标位置。
沿协调运动路径减速。只有在以下情况下指令才使用此值:
输入大于 0 的值。 | |
Decel Units | DINT | 立即数 | 0 = 单位/秒 2 1 = 最大值百分比 坐标定义 = XYZRxRyRz 的笛卡尔几何结构上仅允许“最大值百分比”。 笛卡尔最大值百分比适用于 XYZ,姿态最大值百分比适用于 Rx、Ry 和 Rz。 | |
Change Decel Jerk | SINT、INT 或 DINT | 立即数 | 0 = 否 1 = 是 | |
Decel Jerk | SINT、INT、DINT 或 REAL | 立即数或标签 | 必须始终输入减速急动度操作数的值。仅当将曲线操作数配置为 S 曲线时,此指令才会使用此值。 “减速急动度”表示坐标系统的减速急动度。 使用以下值开始操作。
| |
Jerk Units | SINT、INT 或 DINT | 立即数 | 0 = 单位/秒 3 1 = 最大值百分比 2 = 时间百分比(使用该值开始操作) 坐标定义 = XYZRxRyRz 的笛卡尔几何结构上仅允许“时间百分比”。 | |
(1) 如果在接近或超过减速点的位置执行 MCS 指令,可能发生过冲,并且减速度限值减小。请记住,如果所配置的最大减速度小于激活的减速度,则可将 ChageDecel 设为“否”,间接减小减速度。
结构化文本
输入停止类型和减速度单位(不含空格)。
有关结构化文本中表达式语法的详细信息,请参阅结构化文本语法。
例如,以 CoordinateSystem 形式输入坐标系统操作数。
停止类型对变换的影响
下表介绍了停止类型对属于变换组成部分的坐标系统的影响。
此操作数 | 说明 |
|---|---|
清除 | 此停止类型会:
|
协调运动 (Coordinate Move) | 此停止类型仅会停止协调运动。所有变换均保持激活状态。 |
协调变换 | 此停止类型会取消与指定坐标系统相关的变换。相关目标坐标系统中的所有变换相关运动均会停止,但源坐标轴将继续按指示运动。 示例 如果通过三次变换链接四个坐标系统,第一个坐标系统 (CS1) 为源坐标系统,正在处理给定运动。  对 CS2 执行 MCS 指令并使用协调变换停止类型会造成:
在运动轴停止 (MAS) 指令中,“全部”停止类型还会取消变换。 |
MOTION_INSTRUCTION 数据类型
要查看是否出现以下情况 | 检查该位是否置位 | 数据类型 | 备注 |
|---|---|---|---|
梯级是否为真 | EN | BOOL | 有时,即使梯级变为假,EN 位仍保持置位。如果在指令完成之前梯级变为假或发生错误,则会发生这种情况。 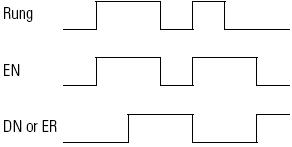 |
已成功启动停止 | DN | BOOL | |
是否发生错误 | ER | BOOL | |
正在停止轴 | IP | BOOL | 以下操作会结束 MCS 指令并将 IP 位清零:
|
轴停止 | PC | BOOL | PC 位保持置位,直至梯级进行假到真跳变。 |
主轴驱动速度控制 (MDSC) 和 MCS 指令
如果在主轴驱动模式下发出 MCS 指令,则会切换为时间驱动模式,且轴会在时间驱动模式下停止。MCS(全部)会复位主轴驱动协调控制 (MDCC) 指令的 IP 位。其他停止类型不会复位 IP 位。
MCS(全部)指令会清除所有后续协调运动指令的待处理主轴,但主轴上的 MCS(全部)不会中断 MDSC 链路。
轴停止时,MDCC 指令的 AC 位复位。
执行 MCS(全部)或 MCS(协调)时(进入 IP 状态),指令队列会清零。
执行 MCS 时(进入 IP 状态),MCLM 或 MCCM 指令的激活运动指令状态字中的状态位 CalculatedDataAvailable 会清零。不会重新计算 CalculatedData。
请注意,如果发出的停止命令十分接近设定端点,实际停止位置可能超过设定端点,尤其是在主轴驱动模式下运行时。
MCS 为跳变指令:
- 在继电器梯形图中,每次要执行该指令时,梯级输入条件均会由假切换为真。
- 在结构化文本中,为指令设置限定条件,以便仅在出现跳变时才执行此指令。
影响数学状态标志
否
严重/轻微故障
没有特定于此指令的故障。如果将未初始化的引用或类型不正确的引用传递给坐标系统操作数,则可能会发生严重故障。有关操作数相关的故障,请参阅 通用属性。
执行
梯形图
条件/状态 | 执行的操作 |
|---|---|
预扫描 | .EN、.DN、.ER 和 .IP 位设置为假。 |
梯级输入条件为假 | 如果 .DN 或 .ER 位为真,则 .EN 位设置为假。 |
梯级输入条件为真 | .EN 位设置为真,指令执行。 |
后扫描 | 不适用 |
结构化文本
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 请参阅“梯形图”表中的“预扫描”行。 |
正常执行 | 请参见“梯形图”表中的“梯级输入条件为假”行,然后参见“梯级输入条件为真”行。 |
后扫描 | 请参见“梯形图”表中的“后扫描”行。 |
错误代码:
有关运动指令,请参阅 运动错误代码 .ERR。
扩展错误代码
请参见运动指令的扩展错误代码。其中包含有关扩展错误代码使用方法的信息。有关运动指令,请参阅 运动错误代码 .ERR。
状态位变化
指令执行时会更改以下这些状态位。
相应标签中 | 位 | 停止类型 | 操作 |
|---|---|---|---|
轴 | CoordinatedMotionStatus |  | 协调运动停止时清零 |
TransformStatus | 协调运动 | 不变 | |
| 断开 | ||
ControlledByTransformStatus | 协调运动 | 轴停止且 MCS 指令的 PC 位置位时清零 | |
| 断开 | ||
坐标系统 | MotionStatus | | 协调运动停止时清零 |
AccelStatus | | 断开 | |
DecelStatus | | 停止期间置位,停止结束时清零 | |
StoppingStatus | | 停止期间置位,PC 位置位时清零 | |
MoveStatus | | 断开 | |
MoveTransitionStatus | | 断开 | |
TransformSourceStatus | 协调运动 | 不变 | |
| 断开 | ||
TransformTargetStatus | 协调运动 | 不变 | |
| 断开 |
停止类型对轴运动变换的影响示例
假定状况如下。
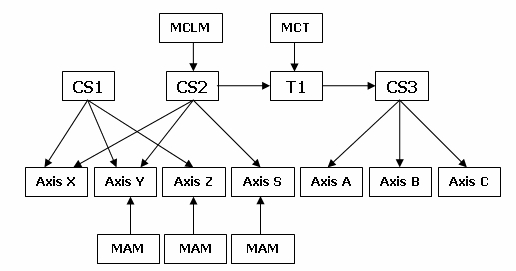
其中:
- 坐标系统 1 (CS1) 包含 X、Y 和 Z 轴。
- 坐标系统 2 (CS2) 包含 Y、Z 和 S 轴。
- 坐标系统 3 (CS3) 包含 A、B 和 C 轴。
- 将 (T1) 连杆源坐标 CS2 变换为目标 CS3。
- CS2 (XYS) 轴映射到 CS3 (ABC) 轴。
- 在 Y、Z 和 S 轴上执行 MAM 指令。
- 在 CS2 上执行 MCLM 指令。
- 执行 MCT 指令时,CS2 作为源,CS3 作为目标。
- 未在 CS2 或 CS3 上执行协调指令。
此表所示为各种采用不同停止类型的 MCS 和 MAS 指令的执行结果。
指令 | 停止类型 | Result |
|---|---|---|
MCS on CS1 | 清除 | 在 CS2 上执行的 MCLM 指令将停止。 |
The MAM on Y will stop. | ||
The MAM on Z will stop. | ||
The MAM on S will continue. | ||
T1 is canceled. | ||
Axes ABC will stop due to canceling the transform. | ||
MCS on CS2 | 清除 | 在 CS2 上执行的 MCLM 指令将停止。 |
The MAM on Y will stop. | ||
The MAM on S will stop. | ||
The MAM on Z will continue. | ||
T1 is canceled. | ||
Axes ABC will stop due to canceling the transform. | ||
MCS on CS3 | 清除 | 在 CS2 上执行的 MCLM 指令将继续。 |
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
T1 is canceled. | ||
Axes ABC will stop due to canceling the transform. | ||
MCS on CS1 | 协调运动 | 在 CS2 上执行的 MCLM 指令将继续。 |
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
T1 stays active. | ||
Axes ABC will follow the respective CS2 axes. | ||
MCS on CS2 | 协调运动 | 在 CS2 上执行的 MCLM 指令将停止。 |
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
T1 stays active. | ||
Axes ABC will follow the respective CS2 axes. | ||
MCS on CS3 | 协调运动 | 在 CS3 上执行的 MCLM 指令将停止。 |
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
T1 stays active. | ||
Axes ABC will follow the respective CS2 axes. | ||
MAS on Y | 清除 | 在 CS2 上执行的 MCLM 指令将停止。 |
The MAM on Y will stop. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
T1 is canceled. | ||
Axes ABC will stop due to canceling the transform. | ||
MAS on Y | 运动 | 在 CS2 上执行的 MCLM 指令将继续。 |
The MAM on Y will stop. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
T1 stays active. | ||
Axes ABC will follow the respective CS2 axes. | ||
MAS on Z | 清除 | 在 CS2 上执行的 MCLM 指令将继续。 |
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will stop. | ||
T1 stays active. | ||
Axes ABC will follow the respective CS2 axes. | ||
MAS on Z | 运动 | 在 CS2 上执行的 MCLM 指令将继续。 |
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will stop. | ||
T1 stays active. | ||
Axes ABC will follow the respective CS2 axes. | ||
MCS on CS1 | 协调变换 | 在 CS2 上执行的 MCLM 指令将继续 |
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
T1 stays active. | ||
Axes ABC will follow the respective CS2 axes. | ||
MCS on CS2 | 协调变换 | T1 将取消。 |
The MCLM instruction on CS2 will continue. | ||
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
Axes ABC will stop due to canceling the transform. | ||
MCS on CS3 | 协调变换 | T1 将取消。 |
The MCLM instruction on CS2 will continue. | ||
The MAM on Y will continue. | ||
The MAM on S will continue. | ||
The MAM on Z will continue. | ||
Axes ABC will stop due to canceling the transform. |
示例
梯形图
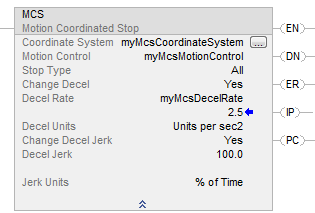
结构化文本
MCS(myMcsCoordinateSystem,myMcsMotionControl,All,Yes,myMcsDecelRate,Unitspersec2,Yes,100.0,%ofTime);
提供反馈