运动错误代码 .ERR
下表列出
Logix Designer
软件运动指令的错误代码。运动指令错误代码说明
错误 | 纠正措施或原因 | 备注 |
1 | 保留错误代码 1 | 保留供将来使用。 |
2 | 保留错误代码 2 | 保留供将来使用。 |
3 | 查找此类型指令的另一实例。确认其 EN 位是否置位、而其 DN 和 ER 位是否清零(使能、但未完成或出错)。等待其 DN 或 ER 位置位。 | 执行冲突 要执行某个指令,如果另一指令尚未完成或已出错,则不能使用与该另一指令相同的控制字。但无论如何,建议为每条指令使用唯一的控制字。 |
4 | 执行该指令前开启伺服环。 | 伺服开启状态错误 |
5 | 执行该指令前关闭伺服环。 | 伺服关闭状态错误 有关运动协调指令的扩展错误代码定义,请参见该指令的联机帮助。通过这些信息可以确定引发错误的轴。 示例:如果扩展错误代码为零,请检查轴的坐标系统索引是否为零。 |
6 | 禁用轴驱动器。 | 驱动器开启状态错误 |
7 | 执行运动轴关闭复位 (MASR) 指令或直接以命令形式将轴复位。 | 关闭状态错误 有关运动协调指令的扩展错误代码定义,请参见该指令的联机帮助。通过这些信息可以确定引发错误的轴。 示例:如果扩展错误代码为零,请检查轴的坐标系统索引是否为零。 |
8 | 配置的轴类型不正确。 | 轴类型错误 有关运动协调指令的扩展错误代码定义,请参见该指令的联机帮助。通过这些信息可以确定引发错误的轴。 示例:如果扩展错误代码为零,请检查轴的坐标系统索引是否为零。 |
9 | 指令尝试执行的方向会使当前超程状况加剧。 | 超程状况 |
10 | 主轴参考与从轴参考相同,或者主轴也在从坐标系统中。 | 主轴冲突 |
11 | 至少有一个轴未配置给物理运动控制模块或未分配给运动组。 | 轴未配置 对于单轴指令: MAG、MDAC、MAPC、MAM、MAJ、MATC 和 MCD 的扩展错误代码定义如下: 1 = 从轴 2 = 主轴 对于时间驱动模式下的 MAM、MCD 和 MAJ 指令,正在运动的轴为从轴: 对于多轴指令: MDCC、MCLM、MCCM、MCCD 和 MCPM 的扩展错误代码定义如下:坐标系统中的轴编号: 0 = 第一个轴 2 = 主轴或第三个从轴 |
12 | 向伺服模块发送消息失败。 | 伺服消息故障 |
13 | 有关扩展错误代码定义,请参见该指令的联机帮助。 示例:MAJ 指令:ERR = 13,EXERR = 3。在这种情况下,应将速度更改为正确范围内的值。 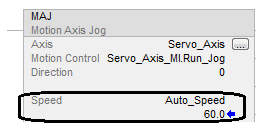 | 参数超出范围 EXERR = 0 表示指令的第一个操作数超出范围。 |
14 | 指令不能应用调谐参数,因为运行调谐指令出错。 | 调谐过程错误 |
15 | 指令不能应用诊断参数,因为运行诊断测试指令出错。 | 测试过程错误 |
16 | 等待归零过程完成。 对于协调运动指令,此代码可标识引发错误的轴。 | 归零进行中错误 |
17 | 指令尝试在未配置旋转操作的轴上执行旋转运动。 | 轴处于非旋转模式 |
18 | 轴类型配置为未使用。 | 轴类型未使用 |
19 | 运动组未处于同步状态。这可能因伺服模块缺失或配置不当造成。 | 组未同步 组同步状态仅在发生组重叠或 CST 缺失故障时清零。 |
20 | 轴处于故障状态。 | 轴处于故障状态 |
21 | 组处于故障状态。 | 组处于故障状态 |
22 | 停止轴,然后执行该指令。 | 轴处于运动状态 |
23 | 指令尝试非法更改动力学参数。 | 非法动力学参数更改 |
24 | 使控制器退出测试模式。 | 非法控制器模式 |
25 | 以下两种情况都可能是引发此错误的原因:
| 非法指令 |
26 | 凸轮数组的长度不合法。 | 非法凸轮长度 |
27 | 凸轮廓线数组的长度不合法。 | 非法凸轮廓线长度 |
28 | 凸轮元素中的段类型不合法。 | 非法凸轮类型 运动指令的 .SEGMENT 字段标识哪些凸轮廓线元素包含无效段类型。 .SEGMENT = 3 表示凸轮廓线数组的第四个元素(或 [3])包含无效的段类型。 |
29 | 凸轮元素的顺序不合法。 | 非法凸轮顺序 运动指令的 .SEGMENT 字段标识哪些凸轮廓线元素包含无效(非升序)主轴值。 .SEGMENT = 3 表示凸轮廓线数组的第四个元素(或 [3])包含无效(非升序)主轴值。 |
30 | 尝试在计算凸轮廓线时执行凸轮廓线。 | 凸轮廓线正在计算中 |
31 | 尝试执行的凸轮廓线数组正在使用中。 | 凸轮廓线正在使用中 |
32 | 尝试执行的凸轮廓线数组尚未计算。 | 凸轮廓线未计算 |
33 | 尝试在位置凸轮未启用时执行 MAM - 主轴偏移运动。 | 位置凸轮未启用 |
34 | MAH 指令尝试在记录已执行时启动。 | 记录进行中 |
35 | 指定的执行目标超出为轴配置的输出凸轮目标数。 | 非法执行目标 |
36 | 输出凸轮数组的大小不受支持,或者其中一个成员的值超出范围。 | 非法输出凸轮 ExErr#1:输出位小于 0 或大于 31。 ExErr#2:锁定类型小于 0 或大于 3。 ExErr#3:解锁类型小于 0 或大于 5。 ExErr#4:左侧或右侧位置超出凸轮范围,且锁定或解锁类型设为“位置”或“位置和使能”。 ExErr#5:持续时间小于或等于 0,且解锁类型设为“持续时间”或“持续时间和使能”。 ExErr#6:使能类型小于 0 或大于 3,且锁定或解锁类型设为“使能”、“位置和使能”、或“持续时间和使能”。 ExErr#7:使能位小于 0 或大于 31,且锁定或解锁类型设为“使能”、“位置和使能”、或“持续时间和使能”。 ExErr#8:锁定类型设为“未激活”,且解锁类型设为“持续时间”或“持续时间和使能”。 |
37 | 输出补偿数组的大小不受支持,或者其中一个成员的值超出范围。 与错误 36 和 37 相关的数组索引存储在运动指令数据类型的 .SEGMENT 中。若存在多个错误,仅会存储其中的第一个。检测到的具体错误存储在扩展错误代码中。 由于能够动态修改输出凸轮表,因此在 MAOC 执行过程中可能发生非法输出凸轮错误 36。通常,将跳过检测到错误的凸轮元素。以下所列为将继续处理的异常状况。 错误 2,锁定类型无效。闭锁类型默认设为未激活。 错误 3,解锁类型无效。解锁类型默认设为未激活。 错误 8,解锁类型为“持续时间和使能”。相当于“使能”解锁类型。 | 非法输出补偿 ExErr#1:模式小于 0 或大于 3。 ExErr#2:周期时间小于或等于 0,且模式设为“生成脉冲”或“反转和生成脉冲”。 ExErr#3:占空比小于 0 或大于 100,且模式设为“生成脉冲”或“反转和生成脉冲”。 |
38 | 轴数据类型不合法。对操作而言不正确。 | 非法轴数据类型 |
39 | 过程中发生冲突。测试和调谐不能同时运行。 | 过程冲突 |
40 | 驱动器在本地禁用时尝试运行 MSO 或 MAH 指令。 | 驱动器在本地已禁用 |
41 | 归零配置不合法。归零序列未设为“立即”时使用了绝对归零指令。 | 非法归零配置 |
42 | MASD 或 MGSD 指令因未收到关闭状态位而超时。若 MASD 或 MGSD 后接的复位指令在关闭指令收到关闭位之前启动,通常会引发编程问题。 | 关闭状态超时 |
43 | 尝试激活的运动指令数量超过指令队列可容纳的数量。 | 坐标系统队列已满 |
44 | 通过三 (3) 点绘制一条线,且无法确定中心点、经由点或平面中心点。 | 圆弧共线错误 |
45 | 已指定一 (1) 个点半径或“绘制直线”的中心点、经由点,并且无法确定中心点半径或平面中心点、经由点。 | 圆弧起点终点错误 |
46 | 设定的中心点与起点和终点的距离不相等。 | 圆弧 R1 R2 不匹配错误 |
47 | 请联系 Rockwell Automation 技术支持。 | 圆弧无穷解错误 |
48 | 请联系 Rockwell Automation 技术支持。 | 圆弧无解错误 |
49 | |R| < 0.01。R 过小,无法用于计算。 | 圆弧 R 过小错误 |
50 | 坐标系统标签未关联到运动组。 | 坐标系统未处于组中 |
51 | 已将终止类型设为值为 0 的实际位置。该值不受支持。 | 实际公差无效 |
52 | 至少有一个轴当前正在另一坐标系统中进行协调运动。 | 协调运动进行中错误 |
53 | 取消禁用轴。 | 轴已禁用 对于单轴指令,MAG、MDAC、MAPC、MAM、MAJ、MATC 和 MCD 的扩展错误代码定义如下: 1 = 从轴 2 = 主轴 对于时间驱动模式下的 MAM、MCD 和 MAJ 指令,正在运动的轴为从轴: 对于多轴指令,MDCC、MCLM、MCCM、MCCD、MCTO 和 MCPM 的扩展错误代码定义如下: 坐标系统中的轴编号: 0 = 第一个轴 2 = 主轴或第三个从轴 |
54 | 如果轴的最大减速度为零,则不能开始运动。 对于协调运动指令,此代码可标识引发错误的轴。 | 最大减速度为零 |
61 | 有关扩展错误代码定义,请参见该指令的联机帮助。 | 连接冲突 |
62 | 取消控制该轴的变换,或者在变换激活时不使用该指令。 | 变换进行中 如果轴是激活变换的一部分,则不能执行此指令。 |
63 | 取消控制该轴的变换,或者等待变换完成轴的运动。 | 轴处于变换运动中 如果变换正在使轴运动,则不能执行该指令。 |
64 | 使用笛卡尔坐标系统。 | 辅助轴不受支持 不能将非笛卡尔坐标系统与该指令配合使用。 |
65 | 一旦发生错误,轴(或主轴)将定位在产生运动的相应指令的有效执行范围内。 此错误发生于 MAM、MAPC、MCLM、MCCM、MCPM 指令及运动学变换中的轴上。执行指令且绝对位置超出超程限位范围时,会发生此错误。 | 绝对位置超出超程限位范围 |
66 | 请务必将机器人保持在为其配置的手臂解中。可将机器人配置为处于左臂解或右臂解。 | 正在尝试使关节式独立机器人或非独立式两轴机器人在象限边界向自身折返。 |
67 | 以下两种情况都可能是引发此错误的原因: 1.正尝试运动到机器人无法到达的位置。 2.尝试在原点执行 MCT、MCTO、MCTP 或 MCTPO 指令。 为避免机器人向自身折返或超出其到达范围,会在内部通过固件计算 Delta2D、Delta3D 和 SCARA Delta 机器人的关节限位。如果尝试执行和配置的运动违反这些限制,则会发生此错误。 有关扩展错误代码定义,请参见该指令的联机帮助。此代码可标识引发错误的姿态轴。 | 变换位置无效 |
68 | 移动关节,使机器人末端不处于坐标系统原点。 | 在原点变换 如果关节角度导致 X1 = 0 和 X2 = 0,则不能开始变换。 |
69 | 检查关节的最大速度配置。 选择目标位置时,要确保机器人在坐标系统原点时不会完全伸展或向自身折返。 沿相对笔直的线运动,经由 X1 = 0 和 X2 = 0 的位置。 | 超出最大关节速度 计算所得的速度非常大。机器人出现以下状况时,会发生此错误: 完全伸展。 向自身折返。 向 X1 = 0 和 X2 = 0 靠近时的角度与远离该位置时的角度不同。 配置了错误的速度限制。 示例:图中所示运动会生成此错误。 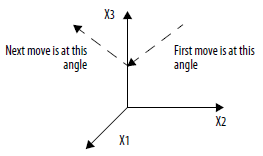 |
70 | 查找已配置为旋转定位模式的源或目标轴。将其更改为线性定位模式。 | 处于变换状态的轴必须为线性轴 变换仅适用于线性轴。 |
71 | 等待要取消的变换完全取消。 | 变换取消中 |
72 | 检查目标位置。计算所得的关节角度超过 +/- 360⋅。 | 超出最大关节角度 |
73 | 检查该链中的每条 MCT 指令是否正在生成有效位置。 | 坐标系统链错误 此 MCT 指令处于 MCT 指令链中。链中的一条指令出现问题。 |
74 | 将姿态更改为 +/- 360⋅ 范围内的角度。 | 姿态角无效 |
75 | 此指令仅适用于 1756-L6x 控制器。 | 指令不受支持 MCT 或 MCTP 指令仅可用于 1756-L6x 控制器。 |
76 | 如果轴的最大减速急动度为零,则不能启动使用 S 曲线的运动。 1.打开轴的属性页面。 2.在 规划器 (Planner) 选项卡中,输入最大减速急动度 (Maximum Deceleration Jerk) 的值。 | 最大减速急动度为零 |
77 | 坐标系统中有多少个轴? 2 — 使用非镜像变换方向。 3 — 使用非逆向变换方向。 | 变换方向不受支持 正在尝试将 3 轴坐标系统以及非零基点偏移 (X2b) 或执行器偏移 (X2e) 与镜像方向搭配使用。 镜像方向不受 2 轴坐标系统的支持。 正在尝试将 2 轴或 3 轴笛卡尔坐标、Delta2D、Delta3D 或 SCARA Delta 目标坐标系统与正向和反向之外的其他变换方向搭配使用。 仅当以下条件均满足时,才能使用反向镜像方向: 使用 3 轴坐标系统。 X2 维度的基点偏移 (X2b) 和末端执行器偏移 (X2e) 为零。 |
78 | 对第二条指令执行的重新检查与激活的停止指令顶部重叠。 | 正在停止时不允许 正在停止时不能与某些运动指令重叠。需等待第一条指令完成,然后再开始执行第二条指令。 |
79 | 再次使轴归零。 如果在执行归零序列期间轴上出现任何其他运动,则会发生归零指令错误。 | 内部归零序列错误 规划器状态无效 如果显示此错误,则在应用程序中重新使轴归零。确保先将轴停止,然后再尝试进行归零。如果错误仍然存在,请联系 Rockwell Automation 技术支持部门。 |
80 | 引用规划的输出模块(例如 OB16IS)时,应确保 MAOC 的输出操作数引用 O:Data,并确保规划的输出模块的通信格式设为“每点规划的输出数据”。 | MAOC 输出操作数无效 如果 MAOC 输出操作数引用规划的输出模块 OB16IS,启动 MAOC 时会额外执行两次检查。 输出操作数必须引用模块输出数据标签的起始元素“O.Data”。 OB16IS 模块的通信格式必须为默认格式 “每点规划的输出数据”。 如果其中任一检查未成功执行,都会显示此错误。 ExErr#1:数据标签引用无效 - 输出操作数未指向模块输出数据标签的 O.Data 元素。这仅适用于 5069-OB16F、1756-OB16IEFS、1732E-OB8M8SR 和 OB16IS 模块。 ExErr#2:下列其中一个模块的模块通信格式无效:5069-OB16F、1756-OB16IEFS、1756-OB16IS、1732E-OB8M8SR 模块。 ExErr#3:未与 CIP Sync 同步 - 规划的输出模块报告未与 CIP Sync 主时钟同步。仅适用于 5069-OB16F、1756-OB16IEFS、1732E-OB8M8SR 模块。 ExErr#4:主时钟不匹配 - 规划的输出模块与控制器的主时钟不同。仅适用于 5069-OB16F、1756-OB16IEFS、1732E-OB8M8SR 模块。 |
81 | 如果在 MGSR 指令仍在执行时执行 MASD 或 MGS 指令(设定),则 MGSR 会发生错误。 请勿将 MASD 指令或停止模式 =“设定速度”的 MGS 停止指令与激活的 MGSR 指令重叠。 | 部分组关闭复位。 如果应用程序主动执行 MGSR 指令,而您在停止模式 =“设定速度”的情况下尝试对受激活 MGSR 指令影响的一个轴执行 MASD 指令或 MGS 停止指令,则 MGSR 指令将指示该错误。 |
82 | 轴处于错误工作轴状态。 | CIP 轴处于错误状态。 |
83 | 由于控制模式或反馈选择,无法执行该指令。 | 非法控制模式或方法。 MDS 指令在“位置环”或“仅反馈”模式下无效。 当 CIP Motion 设备没有有效的反馈来执行指令时,也会触发该错误。 |
84 | 未分配 CIP 驱动器设备数字输入。 | 未分配驱动器数字输入 |
85 | 重新定义位置时不允许执行该指令。 如果在 MRP 指令执行期间执行 MAH 指令,会产生该指令错误。 | 正在进行归零、重新定义位置 正在执行激活的重新定义位置指令。 如果在 MRP 执行期间执行任何运动轨迹规划器指令,将出现该错误。这些运动指令包括:MAM、MAJ、MCLM、MCCM、MATC、MAPC、MDAC、MDCC 和 MCPM。 |
86 | 目前使用 MDS 指令需要用到一个不受支持的可选属性。 | 所使用的集成运动驱动器不支持该可选属性。对反馈轴与 Kinetix 6500 驱动器错误相关联的 CIP - 速度环执行 MDS 指令。指令需要使用当前不受支持的可选属性。驱动器类型不支持 MDS 指令。 |
87 | 运行直接受控运动时,指令无效。 | 直接运动期间不允许 |
88 | 运行规划运动时,指令无效。 | 规划器激活期间不允许 |
93 | 在通过执行 MDAC 或 MDCC 建立 MDSC 链路之前在 MDSC 模式下以编程方式发出运动指示。 | MDSC 未激活 |
94 | 一些动力学单位属于主轴驱动模式,而另一些单位属于时间驱动模式。 一些单位基于时间,而另一些单位基于速度,例如,速度单位采用秒,而加速度单位采用“单位/秒^2”。 单位不兼容。以秒为单位的动力学参数与“当前”合并速度模式不兼容。 | MDSC 单位冲突 |
95 | 队列中的所有指令必须使用兼容的锁定方向,例如“仅位置正向”和“仅立即正向”。 锁定方向 = 无,而速度单位属于主轴驱动模式。 | MDSC 锁定方向冲突 如果在轴运动期间将时间驱动模式切换为主轴驱动模式,并且锁定方向不是立即正向或立即反向,将出现错误 95“MDSC 锁定方向冲突”。 |
96 | 对同一从轴执行 MDAC(运动类型 = 全部)和 MDAC(运动类型 = 全部以外其他值)。 | MDSC MDAC 全部类型冲突 |
97 | 尝试以速度为零的新主轴替代运行中的主轴,或者通过另一 MAM 以未在运动的相同或不同主轴替代正通过 MAM 运动的从轴。 | MDSC 空闲主轴和从轴运动 |
98 | 从轴已在运动期间,主轴运动的实际方向与锁定方向参数设定的方向(仅立即正向或仅立即反向)不匹配。 | MDSC 锁定方向主轴方向不匹配 |
99 | 以下两种情况都可能是引发此错误的原因:
| MDSC 功能不受支持 |
100 | 如果速度单位为秒或主轴单位,运动必须从静止状态开始。 | 轴未处于静止状态。 |
101 | 返回数据数组不存在,或者大小不足以存储所有请求的数据。 | MDSC 计算的数据大小错误。 |
102 | 在轴运动期间,尝试激活具有锁定位置的另一 MDSC 指令,或激活具有锁定位置的合并指令。 | 运动中执行 MDSC 锁定。 |
103 | 如果主轴发生更改,而新从轴速度小于单轴指令原从轴速度的 5% 或 10%(具体视原从轴坐标系统运动速度而定),则将出现此错误,并且不允许进行更改。如果从时间驱动模式切换为 MDSC 模式,同样会出现这种情况。 | MDSC 从轴减速无效。 |
104 | 如果: 通过运动指令执行如下操作: 更改主轴 更改速度单位 并且: 如果在同一更新周期内,该指令强制暂停(速度为零)或停止(使用 MAS 或 MCS)运动 则: 速度曲线将变为梯形,并报告该错误代码。 | 在 1 个更新周期内启动 2 条 MDSC 指令,因此急动度达到最大。 |
105 | 协调运动队列中的指令尝试更改主轴,或尝试将由 MDSC 模式切换为时间驱动模式、或由时间驱动模式切换为 MDSC 模式。 | MDSC 模式或主轴更改无效。 |
106 | 在使用秒的时间驱动模式或使用主轴单位的主轴驱动模式下编程时,不能使用“当前”合并速度模式。 更改合并速度参数。 | 使用秒时“当前”合并模式非法。 |
107 | 目标设备不支持请求的操作和/或服务。 | 不能采取任何纠正措施。 |
108 | 坐标系统包含复用轴。 | 运动协调指令不能包含复用轴。 |
109 | 尝试使用定义为转换器或跟踪段的轴。 | 轴配置无效 该指令不能使用转换器或跟踪段。 |
110 | 尝试将配置为转换器的轴放入坐标系统定义中。 | 该指令不能使用转换器。 |
111 | 如果轴的最大加速度为零,则无法开始运动。
| 最大加速度为零 |
112 | 在 CompactLogix 5370、ControlLogix 5570、Compact GuardLogix 5370 和 GuardLogix 5570 控制器 | 操作数不受支持。 |
121 | 坐标定义不能设置为 <none>。 | 指令的无效坐标定义。 |
125 | 操作数 0 必须是笛卡尔坐标系统类型。 | 源坐标系统不是笛卡儿坐标系统。 |
126 | 操作数 1 必须不是笛卡尔坐标系统类型。 | 目标坐标系统是笛卡尔坐标系统。 |
128 | 不支持圈数计数器功能。 4 轴几何结构的 J1 和 J4 以及 5 轴几何机构的 J1 和 J6 不支持圈数计数器。 禁用变换时,不支持圈数计数器功能。 | 不支持圈数计数器功能。 |
130 | 无法将支持姿态的坐标系统与 MCLM、MCCM 和 MCCD 指令搭配使用。 纠正措施: 1.将笛卡尔坐标系统的坐标定义修改为 <none> 或 2.将已配置的笛卡尔坐标系统 XYZRxRyRz 与支持姿态轴控制的 MCPM 指令搭配使用。 | 不得在支持姿态的几何结构上使用。 |
132 | 请按如下所述设置 MCS 的操作数,否则指令会报告该错误。 1.如果将 更改减速度 (Change Decel) 设置为是 (Yes),则减速度单位 (Decel Units) 必须为最大值百分比 (% of Maximum)。不得使用单位/秒^2,因为笛卡尔坐标系统和姿态轴需要使用不同的减速度值。2. 更改减速急动度 (Change Decel Jerk) 必须设置为是 (Yes)。不得将其设置为否 (No),因为笛卡尔坐标系统和姿态轴需要使用不同的急动度值。3. 减速急动度单位 (Decel Jerk Units) 必须设定为时间百分比 (% of time)。不得使用单位/秒^3 和最大值百分比,因为笛卡尔坐标系统和姿态轴需要使用不同的值。 | MCS 单位冲突 |
135 | 如果 MCPM 速度、加速度或减速度的单位设定为最大值百分比,并且相关主轴驱动 MDCC 指令的额定主轴速度设置为零,则指令将报告该错误。 | MCPM 标称主轴速度为零。 |
136 | 以下两种情况可能导致发生此冲突:
| MCPM 机器人配置冲突。 |
137 | MCTPO 指令的机器人配置参数对于机器人几何结构无效。 | 机器人配置无效。 |
138 | 有关此错误代码的详细信息,请参见 MCPM 指令联机帮助中的扩展错误代码。 | MCPM 路径数据值无效。 |
139 | 有关此错误代码的详细信息,请参见 MCPM 指令联机帮助中的扩展错误代码。 | MCPM 动力学数据值无效。 |
140 | 等待伺服开启操作完成。 | 正在进行伺服开启。 |
141 | 等待伺服关闭操作完成。 | 正在进行伺服关闭。 |
142 | 等待关闭复位操作完成。 | 正在关闭复位。 |
143 | 等待轴归零操作完成。 | 正在归零。 |
144 | 等待运动重新定义位置操作完成。 | 正在重新定义位置。 |
145 | 等待关闭操作完成。 | 正在关闭。 |
146 | 如果坐标系统的最大姿态减速度为零,则不能启动运动。 | 最大姿态减速度为零。 |
147 | 坐标系统中的姿态轴(Rx、Ry 或 Rz)出现以下其中一种错误:
有关扩展错误代码定义,请参见该指令的联机帮助。该代码用于标识姿态轴。 | 姿态变换常数无效。 |
148 | 当发生以下情况且姿态偏移无效时,MCTO 或 MCTPO 指令会报告该错误:
有关扩展错误代码定义,请参见该指令的联机帮助。该代码用于标识姿态轴。 | MCTO 或 MCTPO 姿态偏移不为零。 |
149 | 如果坐标系统涉及 MCTO 或 MCTPO 变换,则姿态轴(Rx、Ry 和 Rz)必须是虚拟轴。 有关扩展错误代码定义,请参见该指令的联机帮助。该代码用于标识姿态轴。 | 姿态轴不是虚拟轴。 |
150 | 当姿态轴(Rx、Ry 或 Rz)用作齿轮传动、凸轮传动或主轴驱动指令的主轴时,指令将报告此错误 | 主轴是姿态轴。 |
151 | Delta J1JJ2J6、DeltaJ1J2J3J6 或 Delta J1J2J3J4J5 几何结构的关节角度超出关节角度限值。 有关扩展错误代码定义,请参见该指令的联机帮助。该代码用于标识超出范围的关节。 | 关节角度超出限值。 |
152 | 当姿态轴受控在一个近似更新周期内运动的角度大于或等于 180 度时,将发生错误。 有关扩展错误代码定义,请参见该指令的联机帮助。该代码用于标识姿态轴。 | 姿态轴超出最大姿态速度。 |
153 | 如果机器人无法获得设定的笛卡尔坐标位置(X、Y 或 Z),则会出现该错误。 例如:如果不使用工具,则只能在 2D X-Z 平面上操作 Delta J1J2J6 机器人。如果将笛卡尔坐标点的 Y 设定为非零值,则会出现该错误,同时出现扩展错误 2 以指示变换位置 Y 无效。 有关扩展错误代码定义,请参见该指令的联机帮助。该代码用于标识超出范围的关节。 | 变换位置无效。 |
155 | MCPM 目前不支持对 6 轴机器人几何结构执行任何操作,因此如果尝试,则发生此错误。 | MCPM 不支持机器人几何结构。 |
170 | 在没有活动凸轮的情况下尝试更换凸轮时,指令会报告该错误。 | |
171 | 如果尝试更换超出凸轮廓线范围的凸轮和替换点,则发生该错误。 | |
172 | 尝试在“执行计划”为“待处理”时更换凸轮。 | 凸轮类型为“替换并重新开始”或“替换并继续”,且“执行规划”为“待定”。 “待定”的执行规划仅与凸轮类型“新建凸轮”相关。 |
173 | 凸轮在经过替换位置前已完成。 | 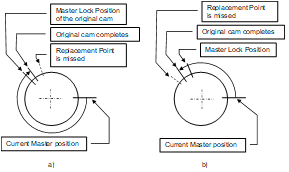 |
174 | 凸轮替换起点超出现有凸轮边界。 |  示例:活动凸轮锁定,替换凸轮的主轴锁定位置设为右侧凸轮边界外的点。 |
176 | 运动计算从轴值 (MCSV) 找不到所提供的从轴值的主轴值。 | |
178 | 不支持所选“凸轮类型”。 | CompactLogix 5370、ControlLogix 5570、Compact GuardLogix 5370 和 GuardLogix 5570 控制器不支持“替换并重新开始”和“替换并继续”。 |
179 | 当凸轮廓线数组操作数包含无效值(例如溢出或非数字)时,指令将报告该错误。 “运动计算凸轮廓线 (MCCP)”指令或凸轮廓线编辑器用于重新计算凸轮廓线,并确认主轴和从轴值不包含无效值。 | 对于 MATC、MAPC 和 MCSV 指令,运动指令的 .SEGMENT 字段标识哪些凸轮廓线元素包含无效值。 .SEGMENT = 3 表示凸轮廓线数组的第四个元素(或 [3])包含无效数目。检查凸轮廓线数组元素的主轴、从轴、C0、C1、C2 和 C3 值。 |
如果某些运动指令在运动停止指令激活期间重叠,将发生错误。这种情况下,指令将主动停止,而与激活指令重叠的另一条指令启动。下表列出一些将引发错误的重叠实例。
在这种情况下:
错误# 7 = 关闭状态错误。
错误 #61,ExErr #10 = 连接冲突、变换轴运动或被其他操作锁定。
错误 #78 = 停止期间不允许。
重叠实例中产生的错误
下表列出其他将引发错误的重叠实例。
激活状态的停止指令 | |||||||||
MGS | MGSD | MCS | MAS | ||||||
启动另一指令 | 停止模式 = 快速停止 | 停止模式 = 快速禁用 | 停止模式 = 设定速度 | 停止类型 = 协调运动 | 停止类型 = 协调变换 | 停止类型 = 全部 | 除“全部”停止类型外的所有停止类型 | 停止类型 = 全部 | |
MAAT | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 |
MRAT | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 |
MAHD | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 |
MRHD | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 |
MAH | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 |
MAJ | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | |||
MAM | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | |||
MAG | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | |||
MCD | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 |
MAPC | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | |||
MATC | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | |||
MDO | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | |||
MCT | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #61 ExErr #10 | 错误 #61 ExErr #10 | 错误 #61 ExErr #10 | 错误 #61 ExErr #10 | 错误 #61 ExErr #10 |
MCTO | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #61 ExErr #10 | 错误 #61 ExErr #10 | 错误 #61 ExErr #10 | 错误 #61 ExErr #10 | 错误 #61 ExErr #10 |
MCCD | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | |||
MCLM/MCCM(合并 = 禁用) | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 | |
MCLM/MCCM(合并 = 启用) | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | ||
MCPM | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #78 | |
重叠实例中产生的其他错误
激活状态的停止指令 | ||||||||
MGS | MGSD | MCS | MAS | MASD | ||||
启动另一 指令 | 停止类型 | 停止模式 = 快速 停止 | 停止模式 = 快速禁用 | 停止模式 = 设定速度 | 无 | 停止类型 = 全部 | 停止类型 = 全部 | 无 |
MGS | 停止模式 = 快速停止 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | |||
停止模式 = 快速禁用 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | ||||
停止模式 = 设定速度 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | ||||
MGSR | 无 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #7 | ||
MCS | 停止类型 = 协调运动 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | |
停止类型 = 协调变换 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | ||
所有停止类型,以下情况除外 停止类型 = 全部 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | ||||
MAS | 停止类型 != 全部 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #78 | 错误 #78 | 错误 #7 |
停止类型 = 全部 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #7 | |||
MASR | 无 | 错误 #78 | 错误 #78 | 错误 #78 | 错误 #7 | 错误 #7 | ||
提供反馈