过程变量速度驱动器 (PVSD)
此信息适用于 CompactLogix 5380P、ControlLogix 5580P 和 ControlLogix 5590P 控制器。
过程变量速度驱动器 (Process Variable Speed Drive, PVSD) 指令使用交流(变频)或直流驱动器监控并控制变量速度电机。该指令用于使电机正向或反向运行或点动。可以通过设备对象接口或通过各个引脚与驱动器交互。该对象是 Rockwell Automation 过程对象库中现有 P_VSD Add-On 指令的内置版本。
PVSD 指令用于:
- 使用交流或直流驱动器控制和监控变量速度电机。该指令用于那些控制速度(而非位置)的驱动器,它不使用任何运动轴。
- 选择操作符、程序、外部、覆盖、维护、停用或手控作为驱动器命令和设置的源。
- 使用所选命令源输入速度参考(设定值)。
- 使用所选命令源使电机正向启动。
- 如果已配置为反向启动,则使用所选的命令源反向启动驱动器。
- 如果已配置为正向点动,则使用所选的命令源正向点动驱动器。只有操作员、外部和维护命令源才允许正向点动驱动器。
- 如果已配置为反向点动,则使用所选的命令源反向点动驱动器。只有操作员、外部和维护命令源才能反向点动驱动器。
- 监控实际驱动器状态,包括:
- 速度反馈
- 驱动器就绪
- 驱动器处于活动状态(运行反馈)
- 受控方向
- 实际方向
- 正在加速
- 正在减速
- 速度
- 驱动器警告
- 驱动器故障(带有故障代码和说明)
- 使用一组电源速度接口标签与驱动器设备对象交互。如果接口标签未链接(可选 InOut 参数),则将使用一组输入和输出参数来按信号与驱动器信号交互。
- 搜索链接的故障代码查找表以提供文本驱动器故障信息,或使用通过“电源速度接口故障记录”提供的文本。
- 与其他设备和过程指令一起参与控制策略总线 (BUS_OBJ)。
- 将输出配置为提供启动前声音警告(喇叭)。在启动或点动之前提前发出报警声音的时间是可配置的。
- 配置虚拟化,以提供正在工作的驱动器的模拟反馈,同时禁用向物理设备的输出。
- 配置从应用工程单位到驱动器接口单位的速度参考值的缩放。
- 配置从驱动器接口单位到应用工程单位的速度反馈的缩放。
- 配置速度参考的限制(钳位)。
- 监控运行反馈,并针对无法在配置的时间内启动和无法在配置的时间内停止提供状态和报警。
- 监控用于允许电机正向启动或点动的许可条件。
- 监控用于允许电机反向启动或点动的许可条件。
- 监控用于停止并防止电机启动或点动的互锁条件。如果互锁条件导致电机停止,则触发报警。
- 监控输入/输出 (I/O) 通信故障。
- 在收到操作员命令(启动、停止、点动)时自动清除已锁定报警和驱动器故障。
- 在收到外部命令(启动、停止、点动)时自动清除已锁定报警和驱动器故障。
- 对“报警已禁用”、“不良配置”、“未就绪”和“维护绕过处于活动状态”使用 HMI 浏览路径记录。
- 自动化逻辑使用“可用”状态来指示电机是否可由其他对象控制。
- 对于“启动失败”、“停止失败”、“互锁脱扣”、“输入/输出 (I/O) 故障”和“驱动器故障”状况,使用报警。
可用语言
梯形图
功能块图
结构化文本
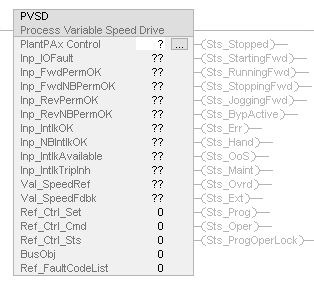
PVSD
(PlantPAx 控件
、Ref_Ctrl_Set、Ref_Ctrl_Cmd、Ref_Ctrl_Sts、BusObj、Ref_FaultCodeList)操作数
重要提示:
以下情况下会导致运行出现意外:
- 输出标签操作数被覆盖。
- 结构操作数的成员被覆盖。
- 除非另外指定,否则结构操作数由多条指令共用。
指令中混用数据类型时,需遵从相关的数据转换规则。请参阅 数据转换。
配置操作数
操作数 | 类型 | 格式 | 说明 |
|---|---|---|---|
PlantPAx Control | P_VARIABLE_SPEED_DRIVE | 标签 | 指令正确运行所需的数据结构。 |
Ref_Ctrl_Set | RAC_ITF_DVC_PWRVELOCITY_SET | 标签 | 速度自动化设备对象设置接口。 |
Ref_Ctrl_Cmd | RAC_ITF_DVC_PWRVELOCITY_CMD | 标签 | 速度自动化设备对象命令接口。 |
Ref_Ctrl_Sts | RAC_ITF_DVC_PWRVELOCITY_STS | 标签 | 速度自动化设备对象状态接口。 |
BusObj | BUS_OBJ | 标签 | 总线组件。 |
Ref_FaultCodeList | RAC_CODE_DESCRIPTION[x] | 标签 | 智能电机控制器的故障代码与故障说明查找表。 |
P_VARIABLE_SPEED_DRIVE 结构
公共成员是可通过编程方式访问的标准可见标签成员。专用隐藏成员用于 HMI 面板中,无法通过编程方式访问。专用成员在公共成员后面的单独表中列出。
公共输入成员 | 数据类型 | FBD 默认可见性 | 需要 FBD 接线 | 用途 | 说明 |
|---|---|---|---|---|---|
EnableIn | BOOL | 不可见 | 不需要 | 输入 | 启用输入 - 系统定义的参数 默认值为真。 |
Inp_InitializeReq | BOOL | 不可见 | 不需要 | 输入 | 1 = 请求初始化指令。指令通常在首次运行时进行初始化。需要重新初始化时使用此请求。该指令自动清除该操作数。 默认值为真。 |
Inp_OwnerCmd | DINT | 不可见 | 不需要 | 输入 | 宿主设备命令。 0 = 无, .10 = 操作员锁定, .11 = 操作员解锁, .12 = 程序锁定, .13 = 程序解锁, .14 = 获取维护, .15 = 释放维护, .16 = 获取外部, .17 = 释放外部, .29 = 回波。 默认值为 0。 |
Inp_SpeedFdbkData | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的速度反馈(例如:采用驱动单位的 0 到 32767 表示 0 到最大频率)。 默认值为 0.0。 |
Inp_DatalinkData | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的辅助信号(数据链接)输入。 默认值为 0.0。 |
Inp_LastFaultCodeData | DINT | 不可见 | 不需要 | 输入 | 最近生成的驱动器故障代码(枚举)。 默认值为 0。 |
Inp_ReadyData | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器运行准备就绪。 默认值为真。 |
Inp_RunningData | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器正在运行(活动)。 默认值为假。 |
Inp_CommandDirData | BOOL | 不可见 | 不需要 | 输入 | 1 = 发出驱动器正向运行命令,0 = 发出驱动器反向运行命令。 默认值为真。 |
Inp_ActualDirData | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器正在正向运行,0 = 驱动器正在反向运行。 默认值为真。 |
Inp_AcceleratingData | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器正在加速。 默认值为假。 |
Inp_DeceleratingData | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器正在减速。 默认值为假。 |
Inp_AtSpeedData | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器按指定的速度运行。 默认值为假。 |
Inp_AlarmData | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器存在报警(警告)条件。有关详细信息,请参阅驱动器显示内容或手册。 默认值为假。 |
Inp_FaultedData | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器出现故障。有关详细信息,请参阅驱动器显示内容或手册。 默认值为假。 |
Inp_DvcNotify | SINT | 不可见 | 不需要 | 输入 | 相关设备对象报警优先级和确认状态。 0 = 未处于报警中,已确认, 1 = 未处于报警中,未确认或需要重置, 2 = 低严重性报警,已确认, 3 = 低严重性报警,未确认, 4 = 中等严重性报警,已确认, 5 = 中等严重性报警,未确认, 6 = 高严重性报警,已确认, 7 = 高严重性报警,未确认, 8 = 紧急严重性报警,已确认, 9 = 紧急严重性报警,未确认。 |
Inp_IOFault | BOOL | 可见 | 不需要 | 输入 | 指示输入/输出 (IO) 数据不准确。 0 = 输入/输出 (IO) 数据良好,1 = 输入/输出 (IO) 数据不良,导致故障。如果驱动器不是虚拟驱动器,此输入会置位 Sts_IOFault,这会引发 IOFault 报警。 默认值为假。 |
Inp_FwdPermOK | BOOL | 可见 | 不需要 | 输入 | 1 = 许可正常 (OK),驱动器可以正向启动或点动。 默认值为真。 |
Inp_FwdNBPermOK | BOOL | 可见 | 不需要 | 输入 | 1 = 不可绕过许可正常 (OK),驱动器可以正向启动或点动。 默认值为真。 |
Inp_RevPermOK | BOOL | 可见 | 不需要 | 输入 | 1 = 许可正常 (OK),驱动器可以反向启动或点动。 默认值为真。 |
Inp_RevNBPermOK | BOOL | 可见 | 不需要 | 输入 | 1 = 不可绕过许可正常 (OK),驱动器可以反向启动或点动。 默认值为真。 |
Inp_IntlkOK | BOOL | 可见 | 不需要 | 输入 | 1 = 互锁正常 (OK),驱动器可以启动或点动并保持运行状态。 默认值为真。 |
Inp_NBIntlkOK | BOOL | 可见 | 不需要 | 输入 | 1 = 不可绕过互锁正常 (OK),驱动器可以启动或点动并保持运行状态。 默认值为真。 |
Inp_IntlkAvailable | BOOL | 可见 | 不需要 | 输入 | 1 = 互锁可用性正常 (OK)。 默认值为假。 |
Inp_IntlkTripInh | BOOL | 可见 | 不需要 | 输入 | 1 = 禁用互锁脱扣状态。 默认值为假。 |
Inp_RdyReset | BOOL | 不可见 | 不需要 | 输入 | 1 = 通过该对象重置的相关对象已准备好重置。 默认值为假。 |
Inp_Hand | BOOL | 不可见 | 不需要 | 输入 | 1 = 获取手控(通常为本地硬接线),0 = 释放手控。 默认值为假。 |
Inp_Ovrd | BOOL | 不可见 | 不需要 | 输入 | 1 = 获取覆盖(较高优先级程序逻辑),0 = 释放覆盖。 默认值为假。 |
Inp_OvrdCmd | SINT | 不可见 | 不需要 | 输入 | 覆盖命令: 0 = 无, 1 = 停止, 2 = 正向启动, 3 = 反向启动。 默认值为 0。 |
Inp_OvrdSpeed | REAL | 不可见 | 不需要 | 输入 | 用于设置覆盖状态下速度参考的值,以速度参考工程单位表示。 默认值为 0.0。 |
Inp_OvrdOutDatalink | REAL | 不可见 | 不需要 | 输入 | 用于设置覆盖状态下输出数据链接的值,以输出数据链接工程单位表示。 默认值为 0.0。 |
Inp_ExtInh | BOOL | 不可见 | 不需要 | 输入 | 1 = 禁止外部获取,0 = 允许外部获取。 默认值为假。 |
Inp_HornInh | BOOL | 不可见 | 不需要 | 输入 | 1 = 禁用声音警告,0 = 启用声音警告。 默认值为假。 |
Inp_Reset | BOOL | 不可见 | 不需要 | 输入 | 1 = 重置已去除锁定和已清除报警。 默认值为假。 |
Cfg_AllowDisable | BOOL | 不可见 | 不需要 | 输入 | 1 = 允许维护人员禁用报警。 默认值为真。 |
Cfg_AllowShelve | BOOL | 不可见 | 不需要 | 输入 | 1 = 允许操作员延迟报警。 默认值为真。 |
Cfg_HasReverse | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器可以反向运行或点动,0 = 仅允许正向运行。 默认值为假。 |
Cfg_HasJog | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器点动命令已启用且可见,0 = 不允许驱动器点动命令。 默认值为假。 |
Cfg_AllowLocal | BOOL | 不可见 | 不需要 | 输入 | 1 = 允许本地启动和停止而不发出报警,0 = 仅通过命令启动或停止。 默认值为假。 |
Cfg_HasRunFdbk | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器在运行时提供反馈信号。 默认值为假。 |
Cfg_UseRunFdbk | BOOL | 不可见 | 不需要 | 输入 | 1 = 故障检查应该使用驱动器运行反馈。 默认值为假。 |
Cfg_HasSpeedFdbk | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器提供速度反馈。 默认值为假。 |
Cfg_UseSpeedFdbk | BOOL | 不可见 | 不需要 | 输入 | 1 = 驱动器速度确定运行状态,0 = 驱动器有效反馈确定的状态。 默认值为假。 |
Cfg_HasInpDatalink | BOOL | 不可见 | 不需要 | 输入 | 1 = 信号已连接到 Inp_DatalinkData。 默认值为假。 |
Cfg_HasOutDatalink | BOOL | 不可见 | 不需要 | 输入 | 1 = 信号已连接到 Out_DatalinkData。 默认值为假。 |
Cfg_HasDvcObj | BOOL | 不可见 | 不需要 | 输入 | 1 = 通知 HMI 已连接设备(例如,驱动器)对象。 默认值为假。 |
Cfg_HasFwdPermObj | BOOL | 不可见 | 不需要 | 输入 | 1 = 通知 HMI 已将对象连接到正向许可输入。 默认值为假。 |
Cfg_HasRevPermObj | BOOL | 不可见 | 不需要 | 输入 | 1 = 通知 HMI 已将对象连接到反向许可输入。 默认值为假。 |
Cfg_HasIntlkObj | BOOL | 不可见 | 不需要 | 输入 | 1 = 通知 HMI 已将对象连接到互锁输入。 默认值为假。 |
Cfg_HasResInhObj | BOOL | 不可见 | 不需要 | 输入 | 1 = 通知 HMI 已连接重启禁用对象。 默认值为假。 |
Cfg_HasRunTimeObj | BOOL | 不可见 | 不需要 | 输入 | 1 = 通知 HMI 已连接运行时间/启动对象。 默认值为假。 |
Cfg_HasMoreObj | BOOL | 不可见 | 不需要 | 输入 | 1 = 通知 HMI 可使用包含更多信息的对象。 默认值为假。 |
Cfg_SetTrack | BOOL | 不可见 | 不需要 | 输入 | 1 = 针对未选定的源设置跟踪,0 = 不跟踪设置。 默认值为真。 |
Cfg_SetTrackOvrdHand | BOOL | 不可见 | 不需要 | 输入 | 1 = 当选择覆盖或手动时,跟踪程序、操作符和外部设置。 默认值为假。 |
Cfg_OperStopPrio | BOOL | 不可见 | 不需要 | 输入 | 1 = 可随时接受 OCmd_Stop; 0 = 仅当选择了 Oper 时,才能接受 OCmd_Stop。 默认值为假。 |
Cfg_ExtStopPrio | BOOL | 不可见 | 不需要 | 输入 | 1 = 可随时接受 XCmd_Stop; 0 = 仅当选择了 Ext 时,才能接受 XCmd_Stop。 默认值为假。 |
Cfg_OCmdResets | BOOL | 不可见 | 不需要 | 输入 | 1 = 任何驱动器 OCmd 重置已去除锁定和已清除报警; 0 = 需要 OCmdReset。 默认值为假。 |
Cfg_XCmdResets | BOOL | 不可见 | 不需要 | 输入 | 1 = 任何驱动器 XCmd 重置已去除锁定和已清除报警; 0 = 需要 XCmdReset。 默认值为假。 |
Cfg_OvrdPermIntlk | BOOL | 不可见 | 不需要 | 输入 | 1 = 覆盖忽略可绕过许可/互锁;0 = 覆盖使用所有许可/互锁。 默认值为假。 |
Cfg_ShedOnFailToStart | BOOL | 不可见 | 不需要 | 输入 | 1 = 启动失败时停止电机并发出报警;0 = 启动失败时仅发出报警。 默认值为真。 |
Cfg_ShedOnIOFault | BOOL | 不可见 | 不需要 | 输入 | 1 = 发生输入/输出 (I/O) 故障时停止电机并发出报警;0 = 发生输入/输出 (I/O) 故障时仅发出报警。 默认值为真。 |
Cfg_HasOper | BOOL | 不可见 | 不需要 | 输入 | 1 = 存在操作符(未锁定),可选择。 默认值为真。 |
Cfg_HasOperLocked | BOOL | 不可见 | 不需要 | 输入 | 1 = 存在锁定的操作符,可选择。 默认值为真。 |
Cfg_HasProg | BOOL | 不可见 | 不需要 | 输入 | 1 = 存在程序(未锁定),可选择。 默认值为真。 |
Cfg_HasProgLocked | BOOL | 不可见 | 不需要 | 输入 | 1 = 存在锁定的程序,可选择。 默认值为真。 |
Cfg_HasExt | BOOL | 不可见 | 不需要 | 输入 | 1 = 存在外部,可选择。 默认值为假。 |
Cfg_HasMaint | BOOL | 不可见 | 不需要 | 输入 | 1 = 存在维护,可选择。 默认值为真。 |
Cfg_HasMaintOoS | BOOL | 不可见 | 不需要 | 输入 | 1 = 存在维护停用,可选择。 默认值为真。 |
Cfg_OvrdOverLock | BOOL | 不可见 | 不需要 | 输入 | 1 = 覆盖取代程序/操作员锁定,0 = 不覆盖锁定。 默认值为真。 |
Cfg_ExtOverLock | BOOL | 不可见 | 不需要 | 输入 | 1 = 外部取代程序/操作员锁定,0 = 不覆盖锁定。 默认值为假。 |
Cfg_ProgPwrUp | BOOL | 不可见 | 不需要 | 输入 | 1 = 为程序加电,0 = 为操作员加电。 默认值为假。 |
Cfg_ProgNormal | BOOL | 不可见 | 不需要 | 输入 | 正常源:1 = 程序(若无请求);0 = 操作员(若无请求)。 默认值为假。 |
Cfg_PCmdPriority | BOOL | 不可见 | 不需要 | 输入 | 命令优先级。1 = 程序命令优先,0 = 操作员命令优先。 默认值为假。 |
Cfg_PCmdProgAsLevel | BOOL | 不可见 | 不需要 | 输入 | 1 = PCmd_Prog 用作级别(1 = Prog,0 = Oper)。 默认值为假。 |
Cfg_PCmdLockAsLevel | BOOL | 不可见 | 不需要 | 输入 | 1 = PCmd_Lock 用作级别(1 = 锁定,0 = 解锁)。 默认值为假。 |
Cfg_ExtAcqAsLevel | BOOL | 不可见 | 不需要 | 输入 | 1 = XCmd_Acq 用作级别(1 = 获取,0 = 释放)。 默认值为假。 |
Cfg_DecPlcs | SINT | 不可见 | 不需要 | 输入 | 用于速度参考/反馈显示的小数位数(0 到 6)。 默认值为 2。 |
Cfg_InpDatalinkDecPlcs | SINT | 不可见 | 不需要 | 输入 | 用于输入数据链接显示的小数位数(0 到 6)。 默认值为 2。 |
Cfg_OutDatalinkDecPlcs | SINT | 不可见 | 不需要 | 输入 | 用于输出数据链接显示的小数位数(0 到 6)。 默认值为 2。 |
Cfg_MinSpeedRef | REAL | 不可见 | 不需要 | 输入 | 以工程单位 (EU) 表示的最小速度参考值(用于限制)。有效值 = 任何小于或等于 Cfg_MaxSpeedRef 且大于或等于 Cfg_SpeedRefEUMin 的浮点数。 默认值为 0.0。 |
Cfg_MaxSpeedRef | REAL | 不可见 | 不需要 | 输入 | 以工程单位 (EU) 表示的最大速度参考值(用于限制)。有效值 = 任何大于或等于 Cfg_MinSpeedRef 且小于或等于 Cfg_SpeedRefEUMax 的浮点数。 默认值为 60.0。 |
Cfg_JogSpeedRef | REAL | 不可见 | 不需要 | 输入 | 点动时使用的速度参考值(工程单位 (EU))。有效值 = 任意浮点数(将限制在已配置的最小值和最大值范围内)。 默认值为 10.0。 |
Cfg_SpeedRefRawMin | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的速度参考最小值(用于缩放)。有效值 = 任何不等于 Cfg_SpeedRefRawMax 的浮点数。 默认值为 0.0。 |
Cfg_SpeedRefRawMax | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的速度参考最大值(用于缩放)。有效值 = 任何不等于 Cfg_SpeedRefRawMin 的浮点数。 默认值为 60.0。 |
Cfg_SpeedRefEUMin | REAL | 不可见 | 不需要 | 输入 | 以工程单位表示的速度参考最小值(用于缩放)。有效值 = 任何小于 Cfg_SpeedRefEUMax 的浮点数。 默认值为 0.0。 |
Cfg_SpeedRefEUMax | REAL | 不可见 | 不需要 | 输入 | 以工程单位表示的速度参考最大值(用于缩放)。有效值 = 任何大于 Cfg_SpeedRefEUMin 的浮点数。 默认值为 60.0。 |
Cfg_SpeedFdbkRawMin | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的速度反馈最小值(用于缩放)。有效值 = 任何不等于 Cfg_SpeedFdbkRawMax 的浮点数。 默认值为 0.0。 |
Cfg_SpeedFdbkRawMax | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的速度反馈最大值(用于缩放)。有效值 = 任何不等于 Cfg_SpeedFdbkRawMin 的浮点数。 默认值为 60.0。 |
Cfg_SpeedFdbkEUMin | REAL | 不可见 | 不需要 | 输入 | 以工程单位表示的速度反馈最小值(用于缩放)。有效值 = 任何小于 Cfg_SpeedFdbkEUMax 的浮点数。 默认值为 0.0。 |
Cfg_SpeedFdbkEUMax | REAL | 不可见 | 不需要 | 输入 | 以工程单位表示的速度反馈最大值(用于缩放)。有效值 = 任何大于 Cfg_SpeedFdbkEUMin 的浮点数。 默认值为 60.0。 |
Cfg_InpDatalinkRawMin | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的输入数据链接最小值(用于缩放)。有效值 = 任何不等于 Cfg_InpDatalinkRawMax 的浮点数。 默认值为 0.0。 |
Cfg_InpDatalinkRawMax | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的输入数据链接最大值(用于缩放)。有效值 = 任何不等于 Cfg_InpDatalinkRawMin 的浮点数。 默认值为 100.0。 |
Cfg_InpDatalinkEUMin | REAL | 不可见 | 不需要 | 输入 | 以工程单位 (EU) 表示的输入数据链接最小值(用于缩放)。有效值 = 任何小于 Cfg_InpDatalinkEUMax 的浮点数。 默认值为 0.0。 |
Cfg_InpDatalinkEUMax | REAL | 不可见 | 不需要 | 输入 | 以工程单位 (EU) 表示的输入数据链接最大值(用于缩放)。有效值 = 任何大于 Cfg_InpDatalinkEUMin 的浮点数。 默认值为 100.0。 |
Cfg_OutDatalinkMin | REAL | 不可见 | 不需要 | 输入 | 以工程单位 (EU) 表示的输出数据链接最小值(用于限制)。有效值 = 任何小于或等于 Cfg_OutDatalinkMax 且大于或等于 Cfg_OutDatalinkEUMin 的浮点数。 默认值为 0.0。 |
Cfg_OutDatalinkMax | REAL | 不可见 | 不需要 | 输入 | 以工程单位 (EU) 表示的输出数据链接最大值(用于限制)。有效值 = 任何大于或等于 Cfg_OutDatalinkMin 且小于或等于 Cfg_OutDatalinkEUMax 的浮点数。 默认值为 100.0。 |
Cfg_OutDatalinkRawMin | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的输出数据链接最小值(用于缩放)。有效值 = 任何不等于 Cfg_OutDatalinkRawMax 的浮点数。 默认值为 0.0。 |
Cfg_OutDatalinkRawMax | REAL | 不可见 | 不需要 | 输入 | 以驱动(原始)单位表示的输出数据链接最大值(用于缩放)。有效值 = 任何不等于 Cfg_OutDatalinkRawMin 的浮点数。 默认值为 100.0。 |
Cfg_OutDatalinkEUMin | REAL | 不可见 | 不需要 | 输入 | 以工程单位表示的输出数据链接最小值(用于缩放)。有效值 = 任何小于 Cfg_OutDatalinkEUMax 的浮点数。 默认值为 0.0。 |
Cfg_OutDatalinkEUMax | REAL | 不可见 | 不需要 | 输入 | 以工程单位表示的输出数据链接最大值(用于缩放)。有效值 = 任何大于 Cfg_OutDatalinkEUMin 的浮点数。 默认值为 100.0。 |
Cfg_StartHornTime | REAL | 不可见 | 不需要 | 输入 | 执行启动命令时发出声音的时间(以秒为单位)。有效值 = 0.0 到 1000.0 秒,0.0 = 已禁用。 默认值为 0.0。 |
Cfg_VirtualRampTime | REAL | 不可见 | 不需要 | 输入 | 虚拟化时过渡速度反馈的时间(以秒为单位)。有效值 = 0.0 到最大浮点数。 默认值为 10.0。 |
Cfg_FailToStartTime | REAL | 不可见 | 不需要 | 输入 | 启动后到发生故障前接收运行反馈的时间(以秒为单位)。有效值 = 0.0 到 2147483.0 秒。 默认值为 15.0。 |
Cfg_FailToStopTime | REAL | 不可见 | 不需要 | 输入 | 停止后到发生故障前丢弃运行反馈的时间(以秒为单位)。有效值 = 0.0 到 2147483.0 秒。 默认值为 15.0。 |
Cfg_ResetPulseTime | REAL | 不可见 | 不需要 | 输入 | 通过脉冲 Out_Reset 清除电机故障的时间(以秒为单位)。有效值 = 0.0 到 2147483.0 秒。 默认值为 2.0。 |
Cfg_MaxJogTime | REAL | 不可见 | 不需要 | 输入 | 最长点动时间(以秒为单位)。有效值 = 0.0 到 2147483.0 秒,0.0 = 无限制。 默认值为 0.0。 |
Cfg_eKeepRef | SINT | 不可见 | 不需要 | 输入 | 速度参考的所有权(枚举): 0 = 遵循 CmdSrc, 1 = 操作员, 2 = 程序, 3 = 外部。 默认值为 0。 |
Cfg_eKeepStart | SINT | 不可见 | 不需要 | 输入 | 启动命令的所有权(枚举): 0 = 遵循 CmdSrc, 1 = 操作员, 2 = 程序, 3 = 外部。 默认值为 0。 |
Cfg_eKeepJog | SINT | 不可见 | 不需要 | 输入 | 点动命令的所有权(枚举): 0 = 遵循 CmdSrc, 1 = 操作员, 3 = 外部。 默认值为 0。 |
Cfg_eKeepOutDatalink | SINT | 不可见 | 不需要 | 输入 | 输出数据链接的所有权(枚举): 0 = 遵循 CmdSrc, 1 = 操作员, 2 = 程序, 3 = 外部。 默认值为 0。 |
Cfg_CnfrmReqd | SINT | 不可见 | 不需要 | 输入 | 需要操作员确认命令。表示需要命令确认的类型。 0 = 无, 1 = 需要命令确认, 2 = 需要执行者电子签名, 3 = 需要执行者和审批者电子签名。 默认值为 0。 |
Cfg_HasHistTrend | SINT | 不可见 | 不需要 | 输入 | 有历史趋势。可以从 HMI 导航到设备历史趋势面板。 0 = 无外部历史趋势, 1 = 目录历史趋势, 2 = Historian 历史趋势。 默认值为 0。 |
PSet_SpeedRef | REAL | 不可见 | 不需要 | 输入 | 运行速度参考的程序设置(速度参考工程单位)。有效值 = 任何实数(将被钳位)。 默认值为 0.0。 |
PSet_OutDatalink | REAL | 不可见 | 不需要 | 输入 | 输出数据链接的程序设置(输出数据链接工程单位)。有效值 = 任何实数(将被钳位)。 默认值为 0.0。 |
PSet_Owner | DINT | 不可见 | 不需要 | 输入 | 程序宿主请求 ID(非零)或释放(零)。 默认值为 0。 |
XSet_SpeedRef | REAL | 不可见 | 不需要 | 输入 | 运行速度参考的外部设置(速度参考工程单位)。有效值 = 任何实数(将被钳位)。 默认值为 0.0。 |
XSet_OutDatalink | REAL | 不可见 | 不需要 | 输入 | 输出数据链接的外部设置(输出数据链接工程单位)。有效值 = 任何实数(将被钳位)。 默认值为 0.0。 |
PCmd_Virtual | BOOL | 不可见 | 不需要 | 输入 | 用于选择虚拟(仿真)设备操作的程序命令。该指令自动清除该操作数。 默认值为假。 |
PCmd_Physical | BOOL | 不可见 | 不需要 | 输入 | 用于选择物理(非仿真)设备操作的程序命令。该指令自动清除该操作数。 默认值为假。 |
PCmd_StartFwd | BOOL | 不可见 | 不需要 | 输入 | 用于正向启动驱动器的程序命令。该指令自动清除该操作数。 默认值为假。 |
PCmd_StartRev | BOOL | 不可见 | 不需要 | 输入 | 用于反向启动驱动器的程序命令。该指令自动清除该操作数。 默认值为假。 |
PCmd_Stop | BOOL | 不可见 | 不需要 | 输入 | 用于停止驱动器的程序命令。该指令自动清除该操作数。 默认值为假。 |
PCmd_Prog | BOOL | 不可见 | 不需要 | 输入 | 用于选择程序的程序命令(操作员到程序)。如果 Cfg_PCmdProgAsLevel = 0,则指令会自动清除此操作数。 默认值为假。 |
PCmd_Oper | BOOL | 不可见 | 不需要 | 输入 | 用于选择操作员的程序命令(程序到操作员)。该指令自动清除该操作数。 默认值为假。 |
PCmd_Lock | BOOL | 不可见 | 不需要 | 输入 | 用于锁定程序的程序命令(不允许操作员)。如果 Cfg_PCmdLockAsLevel = 0,则指令会自动清除此操作数。 默认值为假。 |
PCmd_Unlock | BOOL | 不可见 | 不需要 | 输入 | 用于解锁程序的程序命令(允许操作员获取)。该指令自动清除该操作数。 默认值为假。 |
PCmd_Normal | BOOL | 不可见 | 不需要 | 输入 | 用于选择正常命令源的程序命令(操作员或程序)。该指令自动清除该操作数。 默认值为假。 |
PCmd_Reset | BOOL | 不可见 | 不需要 | 输入 | 用于重置需要重置的所有报警和锁定去除条件的程序命令。该指令自动清除该操作数。 默认值为假。 |
MCmd_Rel | BOOL | 不可见 | 不需要 | 输入 | 用于释放所有权(维护到操作员/程序/外部/覆盖)的维护命令。该指令自动清除该操作数。 默认值为假。 |
OCmd_Unlock | BOOL | 不可见 | 不需要 | 输入 | 用于解锁/释放(允许程序获取)所有权的操作员命令。该指令自动清除该操作数。 默认值为假。 |
XCmd_StartFwd | BOOL | 不可见 | 不需要 | 输入 | 用于正向启动驱动器的外部命令。该指令自动清除该操作数。 默认值为假。 |
XCmd_StartRev | BOOL | 不可见 | 不需要 | 输入 | 用于反向启动驱动器的外部命令。该指令自动清除该操作数。 默认值为假。 |
XCmd_Stop | BOOL | 不可见 | 不需要 | 输入 | 用于停止驱动器的外部命令。该指令自动清除该操作数。 默认值为假。 |
XCmd_JogFwd | BOOL | 不可见 | 不需要 | 输入 | 用于正向点动驱动器的外部命令。如果达到最大点动时间,指令将自动清除该操作数。 默认值为假。 |
XCmd_JogRev | BOOL | 不可见 | 不需要 | 输入 | 用于反向点动驱动器的外部命令。如果达到最长点动时间,指令将自动清除该操作数。 默认值为假。 |
XCmd_Acq | BOOL | 不可见 | 不需要 | 输入 | 用于获取所有权的外部命令(操作员/程序/覆盖/维护到外部)。如果 Cfg_ExtAcqAsLevel = 0,则指令会自动清除此操作数。 默认值为假。 |
XCmd_Rel | BOOL | 不可见 | 不需要 | 输入 | Cfg_ExtAcqAsLevel = 0 时用于释放所有权的外部命令(外部到操作员/程序/覆盖/维护)。该指令自动清除该操作数。 默认值为假。 |
XCmd_Reset | BOOL | 不可见 | 不需要 | 输入 | 用于清除已去除锁定和已清除报警的外部命令。该指令自动清除该操作数。 默认值为假。 |
XCmd_ResetAckAll | BOOL | 不可见 | 不需要 | 输入 | 用于确认和重置所有报警和锁定去除条件的外部命令。该指令自动清除该操作数。 默认值为假。 |
公共输出成员 | 数据类型 | FBD 默认可见性 | 需要 FBD 接线 | 用途 | 说明 |
|---|---|---|---|---|---|
EnableOut | BOOL | 不可见 | 不需要 | 输出 | 启用输出 - 系统定义的参数 |
Out_SpeedRefData | REAL | 不可见 | 不需要 | 输出 | 以驱动(原始)单位表示的速度参考(例如:采用驱动单位的 0 到 32767 表示 0 到最大频率)。 |
Out_DatalinkData | REAL | 不可见 | 不需要 | 输出 | 以驱动(原始)单位表示的辅助信号(数据链接)输出。 |
Out_RunData | BOOL | 不可见 | 不需要 | 输出 | 1 = 启动/运行驱动器,0 = 停止驱动器(对于保持启动器类型)。 |
Out_StopData | BOOL | 不可见 | 不需要 | 输出 | 1 = 停止驱动器,0 = 驱动器保持在当前状态。 |
Out_StartData | BOOL | 不可见 | 不需要 | 输出 | 1 = 启动驱动器,0 = 驱动器保持在当前状态。 |
Out_ClearFaultData | BOOL | 不可见 | 不需要 | 输出 | 1 = 尝试清除驱动器故障。 |
Out_FwdData | BOOL | 不可见 | 不需要 | 输出 | 1 = 将驱动器方向设置为正向。 |
Out_RevData | BOOL | 不可见 | 不需要 | 输出 | 1 = 将驱动器方向设置为反向。 |
Out_HornData | BOOL | 不可见 | 不需要 | 输出 | 1 = 在命令电机启动前发出声音。 |
Out_Reset | BOOL | 不可见 | 不需要 | 输出 | 1 = 已收到并接受重置命令。 |
Out_OwnerSts | DINT | 不可见 | 不需要 | 输出 | 命令源状态、宿主命令握手和就绪状态。 0 = 无, .10 = 操作员锁定, .11 = 操作员解锁, .12 = 程序锁定, .13 = 程序解锁, .14 = 获取维护, .15 = 释放维护, .16 = 获取外部, .17 = 释放外部, .18 = 具有维护, .19 = 外部覆盖锁定, .20 = 具有外部, .21 = 具有操作员, .22 = 操作员已锁定, .23 = 具有程序, .24 = 程序已锁定, .29 = 回波, .30 = 未就绪。 |
Val_SpeedRef | REAL | 可见 | 不需要 | 输出 | 驱动器的速度参考值(目标)。 |
Val_SpeedFdbk | REAL | 可见 | 不需要 | 输出 | 来自驱动器的速度反馈(实际)。 |
Val_InpDatalink | REAL | 不可见 | 不需要 | 输出 | 来自驱动器的输入数据链接值。 |
Val_OutDatalink | REAL | 不可见 | 不需要 | 输出 | 将数据链接值输出到驱动器。 |
Val_SpeedRefEUMin | REAL | 不可见 | 不需要 | 输出 | 速度参考的最小值 = MIN (Cfg_SpeedFdbkEUMin, Cfg_SpeedFdbkEUMax)。 |
Val_SpeedRefEUMax | REAL | 不可见 | 不需要 | 输出 | 最大速度参考值 = MAX (Cfg_SpeedFdbkEUMin, Cfg_SpeedFdbkEUMax)。 |
Val_SpeedFdbkEUMin | REAL | 不可见 | 不需要 | 输出 | 速度反馈最小值 = MIN (Cfg_SpeedFdbkEUMin, Cfg_SpeedFdbkEUMax)。 |
Val_SpeedFdbkEUMax | REAL | 不可见 | 不需要 | 输出 | 最大速度反馈 = MAX (Cfg_SpeedFdbkEUMin, Cfg_SpeedFdbkEUMax)。 |
Sts_Initialized | BOOL | 不可见 | 不需要 | 输出 | 1 = 指令已初始化。使用 Inp_InitializeReq 重新初始化。 |
Sts_Stopped | BOOL | 可见 | 不需要 | 输出 | 1 = 驱动器请求停止并确认已停止。 |
Sts_StartingFwd | BOOL | 可见 | 不需要 | 输出 | 1 = 驱动器请求正向运行并等待运行反馈。 |
Sts_StartingRev | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器请求反向运行并等待运行反馈。 |
Sts_RunningFwd | BOOL | 可见 | 不需要 | 输出 | 1 = 驱动器请求运行并确认正在正向运行。 |
Sts_RunningRev | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器请求运行并确认反向运行。 |
Sts_StoppingFwd | BOOL | 可见 | 不需要 | 输出 | 1 = 驱动器请求停止正向运行并等待已停止反馈。 |
Sts_StoppingRev | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器请求停止反向运行并等待已停止反馈。 |
Sts_JoggingFwd | BOOL | 可见 | 不需要 | 输出 | 1 = 驱动器请求正向点动。 |
Sts_JoggingRev | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器请求反向点动。 |
Sts_Horn | BOOL | 不可见 | 不需要 | 输出 | 1 = 电机声音警报(喇叭)处于活动状态。 |
Sts_CommandDir | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器发出正向命令,0 = 反向。 |
Sts_ActualDir | BOOL | 不可见 | 不需要 | 输出 | 1 = 电机正向旋转(实际方向),0 = 反向。 |
Sts_Accel | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器正在加速。 |
Sts_Decel | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器正在减速。 |
Sts_NotReady | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器未就绪(无法启动),检查是否有报警、是否出现停机以及是否有故障。 |
Sts_Alarm | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器发出报警(请参阅驱动器显示内容或手册)。 |
Sts_AtSpeed | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器正以参考速度运行。 |
Sts_SpeedLimited | BOOL | 不可见 | 不需要 | 输出 | 1 = 速度参考设置超出所配置的最大/最小限制。 |
Sts_Virtual | BOOL | 不可见 | 不需要 | 输出 | 1 = 该指令将驱动器视为虚拟对象。该指令运行正常,但输出保持断电状态;0 = 该指令正常运行驱动器。Sts_Virtual 是 Sts_Virtual 的副本。 |
SrcQ_IO | SINT | 不可见 | 不需要 | 输出 | 主输入或输出的源和质量(枚举): 0 = 良好,畅通,确认良好 1 = 良好,畅通,假定良好, 2 = 良好,无反馈,假定良好, 8 = 测试,虚拟化, 9 = 测试,回路, 10 = 测试,手动输入, 16 = 不确定,畅通,不合格, 17 = 不确定,在设备或总线端替代, 18 = 不确定,在指令端替代, 19 = 不确定,使用最后一个已知良好值, 20 = 不确定,使用替代值, 32 = 不良,信号故障, 33 = 不良,通道故障, 34 = 不良,模块或通信故障, 35 = 不良,配置无效 |
SrcQ | SINT | 不可见 | 不需要 | 输出 | 主值或状态的源和质量(枚举): 0 = 良好,畅通,确认良好 1 = 良好,畅通,假定良好, 2 = 良好,无反馈,假定良好, 8 = 测试,虚拟化, 9 = 测试,回路, 10 = 测试,手动输入, 16 = 不确定,畅通,不合格, 17 = 不确定,在设备或总线端替代, 18 = 不确定,在指令端替代, 19 = 不确定,使用最后一个已知良好值, 20 = 不确定,使用替代值, 32 = 不良,信号故障, 33 = 不良,通道故障, 34 = 不良,模块或通信故障, 35 = 不良,配置无效 |
Sts_eCmd | SINT | 不可见 | 不需要 | 输出 | 驱动器命令: 0 = 无, 1 = 停止, 2 = 正向启动, 3 = 反向启动, 4 = 正向点动, 5 = 反向点动。 |
Sts_eFdbk | SINT | 不可见 | 不需要 | 输出 | 驱动器反馈: 0 = 已停止, 1 = 正向运行 2 = 反向运行 3 = 正在加速, 4 = 正在减速。 |
Sts_eSts | SINT | 不可见 | 不需要 | 输出 | 驱动器状态: 0 = 加电/未知, 1 = 已停止, 2 = 正向运行 3 = 反向运行 4 = 正向启动, 5 = 反向启动, 6 = 正向点动, 7 = 反向点动, 8 = 正在停止, 14 = 喇叭, 15 = 停用。 |
Sts_eFault | SINT | 不可见 | 不需要 | 输出 | 驱动器故障状态: 0 = 无, 15 = 互锁脱扣, 16 = 启动失败, 17 = 停止失败, 18 = 驱动器故障, 32 = 输入/输出 (I/O) 故障, 34 = 配置错误。 |
Sts_eNotify | SINT | 不可见 | 不需要 | 输出 | 所有报警状态枚举值: 0 = 未处于报警中,已确认, 1 = 未处于报警中,未确认或需要重置, 2 = 低严重性报警,已确认, 3 = 低严重性报警,未确认, 4 = 中等严重性报警,已确认, 5 = 中等严重性报警,未确认, 6 = 高严重性报警,已确认, 7 = 高严重性报警,未确认, 8 = 紧急严重性报警,已确认, 9 = 紧急严重性报警,未确认。 |
Sts_eNotifyAll | SINT | 不可见 | 不需要 | 输出 | 所有报警状态枚举值(包括相关对象): 0 = 未处于报警中,已确认, 1 = 未处于报警中,未确认或需要重置, 2 = 低严重性报警,已确认, 3 = 低严重性报警,未确认, 4 = 中等严重性报警,已确认, 5 = 中等严重性报警,未确认, 6 = 高严重性报警,已确认, 7 = 高严重性报警,未确认, 8 = 紧急严重性报警,已确认, 9 = 紧急严重性报警,未确认。 |
Sts_eNotifyIOFault | SINT | 不可见 | 不需要 | 输出 | IOFault 报警状态枚举值: 0 = 未处于报警中,已确认, 1 = 未处于报警中,未确认或需要重置, 2 = 低严重性报警,已确认, 3 = 低严重性报警,未确认, 4 = 中等严重性报警,已确认, 5 = 中等严重性报警,未确认, 6 = 高严重性报警,已确认, 7 = 高严重性报警,未确认, 8 = 紧急严重性报警,已确认, 9 = 紧急严重性报警,未确认。 |
Sts_eNotifyFailToStart | SINT | 不可见 | 不需要 | 输出 | 启动失败报警状态枚举值: 0 = 未处于报警中,已确认, 1 = 未处于报警中,未确认或需要重置, 2 = 低严重性报警,已确认, 3 = 低严重性报警,未确认, 4 = 中等严重性报警,已确认, 5 = 中等严重性报警,未确认, 6 = 高严重性报警,已确认, 7 = 高严重性报警,未确认, 8 = 紧急严重性报警,已确认, 9 = 紧急严重性报警,未确认。 |
Sts_eNotifyFailToStop | SINT | 不可见 | 不需要 | 输出 | 停止失败报警状态枚举值: 0 = 未处于报警中,已确认, 1 = 未处于报警中,未确认或需要重置, 2 = 低严重性报警,已确认, 3 = 低严重性报警,未确认, 4 = 中等严重性报警,已确认, 5 = 中等严重性报警,未确认, 6 = 高严重性报警,已确认, 7 = 高严重性报警,未确认, 8 = 紧急严重性报警,已确认, 9 = 紧急严重性报警,未确认。 |
Sts_eNotifyIntlkTrip | SINT | 不可见 | 不需要 | 输出 | IntlkTrip 报警状态枚举值: 0 = 未处于报警中,已确认, 1 = 未处于报警中,未确认或需要重置, 2 = 低严重性报警,已确认, 3 = 低严重性报警,未确认, 4 = 中等严重性报警,已确认, 5 = 中等严重性报警,未确认, 6 = 高严重性报警,已确认, 7 = 高严重性报警,未确认, 8 = 紧急严重性报警,已确认, 9 = 紧急严重性报警,未确认。 |
Sts_eNotifyDriveFault | SINT | 不可见 | 不需要 | 输出 | “驱动器故障”报警状态枚举值: 0 = 未处于报警中,已确认, 1 = 未处于报警中,未确认或需要重置, 2 = 低严重性报警,已确认, 3 = 低严重性报警,未确认, 4 = 中等严重性报警,已确认, 5 = 中等严重性报警,未确认, 6 = 高严重性报警,已确认, 7 = 高严重性报警,未确认, 8 = 紧急严重性报警,已确认, 9 = 紧急严重性报警,未确认 |
Sts_UnackAlmCount | DINT | 不可见 | 不需要 | 输出 | 未确认报警计数。 |
Sts_eFaultCode | DINT | 不可见 | 不需要 | 输出 | 重置后的第一个驱动器故障代码。有关说明,请参阅驱动器手册或驱动器对象。 |
Sts_eSrc | INT | 不可见 | 不需要 | 输出 | 当前命令源显示时带状态位: Sts_eSrc.0:锁定, Sts_eSrc.1:正常, Sts_eSrc.2:手控, Sts_eSrc.3:维护, Sts_eSrc.4:覆盖, Sts_eSrc.5:程序, Sts_eSrc.6:操作员, Sts_eSrc.7:停用, Sts_eSrc.8:外部。 |
Sts_bSrc | INT | 不可见 | 不需要 | 输出 | 活动选项位图(针对带命令源请求选项的 HMI 图腾柱): Sts_bSrc.0:手控, Sts_bSrc.1:程序停用(梯级为假), Sts_bSrc.2:维护停用, Sts_bSrc.3:维护, Sts_bSrc.4:覆盖, Sts_bSrc.5:外部, Sts_bSrc.6:程序已锁定, Sts_bSrc.7:程序, Sts_bSrc.8:操作员已锁定, Sts_bSrc.9:操作员。 |
Sts_Available | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备已通过程序获取,现在可用于启动/停止控制。 |
Sts_IntlkAvailable | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备可以通过程序获取,并且在互锁正常 (OK) 时可用于启动/停止控制。 |
Sts_Bypass | BOOL | 不可见 | 不需要 | 输出 | 1 = 绕过可绕过的互锁。 |
Sts_BypActive | BOOL | 可见 | 不需要 | 输出 | 1 = 互锁绕过处于活动状态(已绕过或维护中)。 |
Sts_MaintByp | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备有一个维护绕过功能处于活动状态。 |
Sts_NotRdy | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪,请参阅明细位 (Sts_Nrdyxxx) 以查找原因。 |
Sts_NrdyCfgErr | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:配置错误。 |
Sts_NrdyDriveNotReady | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:驱动器未就绪。 |
Sts_NrdyFail | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:设备故障(去除需要重置)。 |
Sts_NrdyIntlk | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:互锁不正常 (OK)。 |
Sts_NrdyIOFault | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:输入/输出 (IO) 故障(去除需要重置)。 |
Sts_NrdyOoS | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:维护禁用设备。 |
Sts_NrdyFwdPerm | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:正向许可不正常 (OK)。 |
Sts_NrdyRevPerm | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:反向许可不正常 (OK)。 |
Sts_NrdyPrioStop | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:操作员或外部优先级停止命令需要重置。 |
Sts_NrdyTrip | BOOL | 不可见 | 不需要 | 输出 | 1 = 设备未就绪:设备已脱扣(驱动器故障需要重置)。 |
Sts_Err | BOOL | 可见 | 不需要 | 输出 | 1 = 配置出错:请参阅明细位 (Sts_ErrXxx) 以查找原因。 |
Sts_ErrAlm | BOOL | 不可见 | 不需要 | 输出 | 1 = 基于 Logix 标签的报警设置中存在错误。 |
Sts_ErrSpeedFdbkRaw | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:以原始单位表示的速度反馈 Cfg_SpeedFdbkRawMin = Cfg_SpeedFdbkRawMax。 |
Sts_ErrSpeedFdbkEU | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_SpeedFdbkEUMax <= Cfg_SpeedFdbkEUMin。 |
Sts_ErrSpeedRefLim | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_MaxSpeedRef < Cfg_MinSpeedRef 或 Cfg_MaxSpeedRef > Cfg_SpeedRefEUMax 或 Cfg_MinSpeedRef < Cfg_SpeedRefEUMin。 |
Sts_ErrSpeedRefEU | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_SpeedRefEUMax <= Cfg_SpeedRefEUMin。 |
Sts_ErrSpeedRefRaw | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_SpeedRefRawMin = Cfg_SpeedRefRawMax。 |
Sts_ErrInpDatalinkRaw | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_InpDatalinkRawMin = Cfg_InpDatalinkRawMax。 |
Sts_ErrInpDatalinkEU | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_InpDataLinkEUMax <= Cfg_InpDatalinkEUMin。 |
Sts_ErrOutDatalinkLim | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_OutDatalinkMax < Cfg_OutDatalinkMin 或 Cfg_OutDatalinkMax > Cfg_OutDatalinkEUMax 或 Cfg_OutDatalinkMin < Cfg_OutDatalinkEUMin。 |
Sts_ErrOutDatalinkEU | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_OutDataLinkEUMax <= Cfg_OutDatalinkEUMin。 |
Sts_ErrOutDatalinkRaw | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:Cfg_OutDatalinkRawMin = Cfg_OutDatalinkRawMax。 |
Sts_ErrVirtualRampTime | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:虚拟速度加速/减速时间:使用 0 到 2147483。 |
Sts_ErrFailToStartTime | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:启动失败计时器预设值:使用 0 到 2147483。 |
Sts_ErrFailToStopTime | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:停止失败计时器预设值:使用 0 到 2147483。 |
Sts_ErrResetPulseTime | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:重置脉冲计时器预设值:使用 0 到 2147483。 |
Sts_ErrMaxJogTime | BOOL | 不可见 | 不需要 | 输出 | 1 = 配置出错:最长点动时间计时器预设值:使用 0 到 2147483。 |
Sts_Hand | BOOL | 可见 | 不需要 | 输出 | 1 = 选择手控(取代 OoS、维护、覆盖、外部、程序、操作员)。 |
Sts_OoS | BOOL | 可见 | 不需要 | 输出 | 1 = 选择停用(取代维护、覆盖、外部、程序、操作符)。 |
Sts_Maint | BOOL | 可见 | 不需要 | 输出 | 1 = 选择维护(取代覆盖、外部、程序、操作符)。 |
Sts_Ovrd | BOOL | 可见 | 不需要 | 输出 | 1 = 选择覆盖(取代外部、程序、操作员)。 |
Sts_Ext | BOOL | 可见 | 不需要 | 输出 | 1 = 选择外部(取代程序和操作员)。 |
Sts_Prog | BOOL | 可见 | 不需要 | 输出 | 1 = 选择程序。 |
Sts_ProgLocked | BOOL | 不可见 | 不需要 | 输出 | 1 = 选择并锁定程序。 |
Sts_Oper | BOOL | 可见 | 不需要 | 输出 | 1 = 选择操作员。 |
Sts_OperLocked | BOOL | 不可见 | 不需要 | 输出 | 1 = 选择并锁定操作员。 |
Sts_ProgOperSel | BOOL | 不可见 | 不需要 | 输出 | 程序/操作员选择(锁定)状态:1 = 程序,0 = 操作员。 |
Sts_ProgOperLock | BOOL | 可见 | 不需要 | 输出 | 程序/操作员锁定状态,1 = 锁定,0 = 解锁。 |
Sts_Normal | BOOL | 不可见 | 不需要 | 输出 | 1 = 选择等于正常(程序或操作员)。 |
Sts_ExtReqInh | BOOL | 不可见 | 不需要 | 输出 | 1 = 禁用外部请求,无法从当前状态进入外部。 |
Sts_ProgReqInh | BOOL | 不可见 | 不需要 | 输出 | 1 = 禁用程序请求,无法从当前状态进入程序。 |
Sts_MAcqRcvd | BOOL | 不可见 | 不需要 | 输出 | 1 = 维护获取命令接收到此扫描。 |
Sts_CmdConflict | BOOL | 不可见 | 不需要 | 输出 | 1 = 冲突的命令收到此扫描。 |
Sts_Alm | BOOL | 不可见 | 不需要 | 输出 | 1 = 报警处于活动状态。 |
Sts_AlmInh | BOOL | 不可见 | 不需要 | 输出 | 1 = 报警已延迟或已禁用。 |
Sts_IOFault | BOOL | 不可见 | 不需要 | 输出 | 输入/输出 (IO) 故障状态:1 = 不良,0 = 正常 (OK)。存在一个基于离散 Logix 标签的预定义默认报警指示状态。设置基于离散 Logix 标签的报警的标准配置成员。可按如下方式访问报警元素:PVSDTag.@Alarms.Alm_IOFault.AlarmElement。 |
Sts_FailToStart | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器无法启动。存在一个基于离散 Logix 标签的预定义默认报警指示状态。设置基于离散 Logix 标签的报警的标准配置成员。可按如下方式访问报警元素:PVSDTag.@Alarms.Alm_FailToStart.AlarmElement。 |
Sts_FailToStop | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器停止失败。存在一个基于离散 Logix 标签的预定义默认报警指示状态。设置基于离散 Logix 标签的报警的标准配置成员。可按如下方式访问报警元素:PVSDTag.@Alarms.Alm_FailToStop.AlarmElement。 |
Sts_IntlkTrip | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器已停止,互锁不正常 (OK)。存在一个基于离散 Logix 标签的预定义默认报警指示状态。设置基于离散 Logix 标签的报警的标准配置成员。可按如下方式访问报警元素:PVSDTag.@Alarms.Alm_IntlkTrip.AlarmElement。 |
Sts_DriveFault | BOOL | 不可见 | 不需要 | 输出 | 1 = 驱动器故障,有关详细信息,请参阅驱动器显示内容或手册。 |
Sts_RdyAck | BOOL | 不可见 | 不需要 | 输出 | 1 = 报警待确认。 |
Sts_RdyReset | BOOL | 不可见 | 不需要 | 输出 | 1 = 锁定的报警或解除条件待重置。 |
XRdy_Acq | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_Acq 就绪,启用 HMI 按钮。 |
XRdy_Rel | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_Rel 就绪,启用 HMI 按钮。 |
XRdy_StartFwd | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_StartFwd 就绪,启用按钮。 |
XRdy_StartRev | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_StartRev 就绪,启用按钮。 |
XRdy_JogFwd | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_JogFwd 就绪,启用按钮。 |
XRdy_JogRev | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_JogRev 就绪,启用按钮。 |
XRdy_Stop | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_Stop 就绪,启用按钮。 |
XRdy_Reset | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_Reset 就绪,启用按钮。 |
XRdy_ResetAckAll | BOOL | 不可见 | 不需要 | 输出 | 1 = XCmd_ResetAckAll 就绪,启用按钮。 |
Val_Owner | DINT | 不可见 | 不需要 | 输出 | 当前对象宿主 ID(0 = 未拥有)。 |
专用输入成员 | 数据类型 | 说明 |
|---|---|---|
CmdSrc | P_COMMAND_SOURCE | 控制或命令源选择。 |
MCmd_Acq | BOOL | 用于获取所有权(操作员/程序/外部/覆盖到维护)的维护命令。该指令自动清除该操作数。 默认值为假。 |
MCmd_Bypass | BOOL | 用于绕过所有可绕过的互锁和许可的维护命令。该指令自动清除该操作数。 默认值为假。 |
MCmd_Check | BOOL | 用于检查(而不是绕过)所有互锁和许可的维护命令。该指令自动清除该操作数。 默认值为假。 |
MCmd_IS | BOOL | 用于选择“服务中”的维护命令。该指令自动清除该操作数。 默认值为假。 |
MCmd_OoS | BOOL | 用于选择“停用”的维护命令。该指令自动清除该操作数。 默认值为假。 |
MCmd_Physical | BOOL | 用于选择物理(非仿真)设备操作的维护命令。该指令自动清除该操作数。 默认值为假。 |
MCmd_Virtual | BOOL | 用于选择虚拟(仿真)设备操作的维护命令。该指令自动清除该操作数。 默认值为假。 |
OCmd_JogFwd | BOOL | 用于正向点动驱动器的操作员命令。如果达到最大点动时间,指令将自动清除该操作数。 默认值为假。 |
OCmd_JogRev | BOOL | 用于反向点动驱动器的操作员命令。如果达到最大点动时间,指令将自动清除该操作数。 默认值为假。 |
OCmd_Lock | BOOL | 用于锁定操作员的操作员命令(不允许程序)。该指令自动清除该操作数。 默认值为假。 |
OCmd_Normal | BOOL | 用于选择正常(操作员或程序)的操作员命令。该指令自动清除该操作数。 默认值为假。 |
OCmd_Oper | BOOL | 用于选择操作员(程序到操作员)的操作员命令。该指令自动清除该操作数。 默认值为假。 |
OCmd_Prog | BOOL | 用于选择程序(操作员到程序)的操作员命令。该指令自动清除该操作数。 默认值为假。 |
OCmd_Reset | BOOL | 用于重置所有报警和锁定去除条件的操作员命令。该指令自动清除该操作数。 默认值为假。 |
OCmd_ResetAckAll | BOOL | 用于确认和重置所有报警和锁定去除条件的操作员命令。OCmd_ResetAckAll 的使用仅限于 HMI。该指令自动清除该操作数。 默认值为假。 |
OCmd_StartFwd | BOOL | 用于正向启动驱动器的操作员命令。该指令自动清除该操作数。 默认值为假。 |
OCmd_StartRev | BOOL | 用于反向启动驱动器的操作员命令。该指令自动清除该操作数。 默认值为假。 |
OCmd_Stop | BOOL | 用于停止驱动器的操作员命令。该指令自动清除该操作数。 默认值为假。 |
OSet_OutDatalink | REAL | 输出数据链接的操作员设置(输出数据链接工程单位)。有效值 = 任意浮点数(被钳位) 默认值为 0.0。 |
OSet_SpeedRef | REAL | 速度参考的操作员设置(速度参考工程单位)。有效值 = 任意浮点数(被钳位) 默认值为 0.0。 |
专用输出成员 | 数据类型 | 说明 |
|---|---|---|
HMI_BusObjIndex | DINT | 总线数组中该对象的索引,供 HMI 显示使用。 默认值为 0。 |
MRdy_Acq | BOOL | 1 = MCmd_Acq 就绪,启用 HMI 按钮。 |
MRdy_Bypass | BOOL | 1 = MCmd_Bypass 就绪,启用 HMI 按钮。 |
MRdy_Check | BOOL | 1 = MCmd_Check 就绪,启用 HMI 按钮。 |
MRdy_IS | BOOL | 1 = MCmd_IS 就绪,启用 HMI 按钮。 |
MRdy_OoS | BOOL | 1 = MCmd_OoS 就绪,启用 HMI 按钮。 |
MRdy_Physical | BOOL | 1 = MCmd_Physical 就绪,启用 HMI 按钮。 |
MRdy_Rel | BOOL | 1 = MCmd_Rel 就绪,启用 HMI 按钮。 |
MRdy_Virtual | BOOL | 1 = MCmd_Virtual 就绪,启用 HMI 按钮。 |
ORdy_JogFwd | BOOL | 1 = OCmd_JogFwd 就绪,启用 HMI 按钮。 |
ORdy_JogRev | BOOL | 1 = OCmd_JogRev 就绪,启用 HMI 按钮。 |
ORdy_Lock | BOOL | 1 = OCmd_Lock 就绪,启用 HMI 按钮。 |
ORdy_Normal | BOOL | 1 = OCmd_Normal 就绪,启用 HMI 按钮。 |
ORdy_Oper | BOOL | 1 = OCmd_Oper 就绪,启用 HMI 按钮。 |
ORdy_OutDatalink | BOOL | 1 = OSet_OutDatalink 就绪,启用数据输入字段。 |
ORdy_Prog | BOOL | 1 = OCmd_Prog 就绪,启用 HMI 按钮。 |
ORdy_Reset | BOOL | 1 = 锁定的报警或解除条件待重置。 |
ORdy_ResetAckAll | BOOL | 1 = 锁定的报警或去除条件待重置或确认。 |
ORdy_SpeedRef | BOOL | 1 = OSet_SpeedRef 就绪,启用数据输入字段。 |
ORdy_StartFwd | BOOL | 1 = OCmd_StartFwd 就绪,启用 HMI 按钮。 |
ORdy_StartRev | BOOL | 1 = OCmd_StartRev 就绪,启用 HMI 按钮。 |
ORdy_Stop | BOOL | 1 = OCmd_Stop 就绪,启用 HMI 按钮。 |
ORdy_Unlock | BOOL | 1 = OCmd_Unlock 就绪,启用 HMI 按钮。 |
Sts_FaultDesc | STRING | 电机控制器故障的说明,从上一个故障代码查找。 |
公共 InOut 成员 | 数据类型 | FBD 默认可见性 | 需要 FBD 接线 | 用途 | 说明 |
|---|---|---|---|---|---|
Ref_Ctrl_Set | RAC_ITF_DVC_PWRVELOCITY_SET | 可见 | 必需 | InOut | 速度自动化设备对象设置接口。 |
Ref_Ctrl_Cmd | RAC_ITF_DVC_PWRVELOCITY_CMD | 可见 | 必需 | InOut | 速度自动化设备对象命令接口。 |
Ref_Ctrl_Sts | RAC_ITF_DVC_PWRVELOCITY_STS | 可见 | 必需 | InOut | 速度自动化设备对象状态接口。 |
BusObj | BUS_OBJ | 可见 | 必需 | InOut | 总线组件。 |
Ref_FaultCodeList | RAC_CODE_DESCRIPTION[1] | 可见 | 必需 | InOut | 智能电机控制器的故障代码与故障说明查找表。 |
RAC_ITF_DVC_PWRVELOCITY_SET 结构
共有三个结构与相关电源速度设备对象交换以与变量速度驱动器设备进行交互,RAC_ITF_DVC_PWRVELOCITY_SET 是其中的第一个结构。该结构用于处理发送到驱动器的设置(如速度参考)。
此参数将指令链接到外部标签,该外部标签包含指令运行所需的数据。外部标签必须为所显示的数据类型,也可以为 NULL。如果为 NULL,则指令上的其他引脚用于链接必需的数据。
成员 | 数据类型 | 说明 |
|---|---|---|
InhibitCmd | BOOL | 1 = 禁用来自外部源的用户命令,0 = 允许命令。 |
InhibitSet | BOOL | 1 = 禁用来自外部源的用户设置,0 = 允许设置。 |
速度 | REAL | 速度参考 (Hz)。有效值 = 0.0 到最高驱动器频率。 |
RAC_ITF_DVC_PWRVELOCITY_CMD 结构
共有三个结构与相关电源速度设备对象交换以与变量速度驱动器设备进行交互,RAC_ITF_DVC_PWRVELOCITY_CMD 是其中的第二个结构。该结构用于处理发送到驱动器的命令(如启动、停止和点动)。它是配置为可选的 InOut 参数(可以为 Null)。
此参数将指令链接到外部标签,该外部标签包含指令运行所需的数据。外部标签必须为所显示的数据类型,也可以为 NULL。如果为 NULL,则指令上的其他引脚用于链接必需的数据。
成员 | 数据类型 | 说明 |
|---|---|---|
bCmd | INT | 命令(位重叠): |
Physical | BOOL | 作为物理设备运行。 |
虚拟 | BOOL | 作为虚拟设备运行。 |
ResetWarn | BOOL | 重置警告状态。 |
ResetFault | BOOL | 重置故障状态。 |
Activate | BOOL | 激活输出电源结构。 |
Deactivate | BOOL | 取消激活输出电源结构。 |
CmdDir | BOOL | 选择方向:0 = 正向,1 = 反向。 |
RAC_ITF_DVC_PWRVELOCITY_STS 结构
共有三个结构与相关电源速度设备对象交换以与变量速度驱动器设备进行交互,RAC_ITF_DVC_PWRVELOCITY_STS 是其中的第三个结构。该结构处理从驱动器接收到的状态(如速度反馈、活动状态、受控方向和实际方向等)。它是配置为可选的 InOut 参数(可以为 Null)。
此参数将指令链接到外部标签,该外部标签包含指令运行所需的数据。外部标签必须为所显示的数据类型,也可以为 NULL。如果为 NULL,则指令上的其他引脚用于链接必需的数据。
成员 | 数据类型 | 说明 |
|---|---|---|
eState | DINT | 设备对象的枚举状态: 0 = 未使用, 1 = 正在初始化, 2 = 已断开连接, 3 = 正在断开连接, 4 = 正在连接, 5 = 空闲, 6 = 正在配置, 7 = 可用。 |
FirstWarning | RAC_ITF_EVENT | 第一个警告。 |
FirstFault | RAC_ITF_EVENT | 第一个故障。 |
eCmdFail | DINT | 枚举的命令故障代码。 |
速度 | REAL | 实际速度 (Hz)。 |
bSts | INT | 状态(位重叠): |
Physical | BOOL | 1 = 作为物理设备运行。 |
虚拟 | BOOL | 1 = 作为虚拟设备运行。 |
Connected | BOOL | 1 = 已连接且正在通信。 |
Available | BOOL | 1 = 设备已配置且可以运行。 |
警告 | BOOL | 1 = 设备发出警告。 |
故障 | BOOL | 1 = 设备发生故障。 |
Ready | BOOL | 1 = 设备已准备好激活。 |
Active | BOOL | 1 = 设备处于活动状态(电源结构处于活动状态,驱动器正在运行)。 |
ZeroSpeed | BOOL | 1 = 电机处于零速(不旋转)。 |
ObjCtrl | BOOL | 0 = 对象可控制此设备,1 = 对象不控制此设备(例如本地 HIM 或输入/输出 (I/O) 控制)。 |
CmdDir | BOOL | 受控方向:1 = 反向,0 = 正向 |
ActDir | BOOL | 实际(旋转)方向:1 = 反向,0 = 正向 |
正在加速 | BOOL | 1 = 电机正在加速。 |
正在减速 | BOOL | 1 = 电机正在减速。 |
AtSpeed | BOOL | 1 = 电机实际速度已达到参考速度。 |
BUS_OBJ 结构
BUS_OBJ 结构用于将变量速度驱动器链接到复杂控制策略中的其他设备和指令,通常采用层级结构。总线对象将状态和报警信息从较低级别的设备汇总到较高级别的控制,从较高级别的控制向较低级别设备发出命令,通过引用与总线相关的 BUS_OBJ 数组的单个成员来将项链接到总线。
此参数将指令链接到外部标签,该外部标签包含指令运行所需的数据。外部标签必须为所显示的数据类型,也可以为 NULL。如果为 NULL,则此指令的总线功能不可用。
成员 | 数据类型 | 说明 |
|---|---|---|
Inp_Cmd | DINT | 用于声明命令的输入 |
Out_Cmd | DINT | 产生的命令 |
Inp_CmdLLH | DINT | 水平常高命令的输入 |
Out_CmdLLH | DINT | 产生的线路水平高命令 |
Inp_Sts | DINT | 用于声明状态的输入 |
Out_Sts | DINT | 产生的状态 |
Inp_CmdAck | DINT | 用于声明命令确认的输入 |
Out_CmdAck | DINT | 产生的命令确认 |
Inp_SeverityMax | DINT | 输入:最大报警严重性 |
Out_SeverityMax | DINT | 最大报警严重性的产生 |
Cfg_CmdMask | DINT | 命令的传播掩码 |
Cfg_CmdLLHMask | DINT | 线路水平高命令的传播掩码 |
Cfg_StsMask | DINT | 状态的传播掩码 |
Ref_Index | DINT | 总线数组索引 |
RAC_CODE_DESCRIPTION[x] 结构
RAC_CODE_DESCRIPTION[x] 结构是由驱动器故障代码号和故障代码说明对组成的数组,用作查找表。指令在表格中搜索从驱动器接收到的故障代码,并显示相应的故障说明文本。
此参数将指令链接到外部标签,该外部标签包含指令运行所需的数据。外部标签必须为所显示的数据类型,也可以为 NULL。如果为 NULL,则不执行故障代码查找功能。仅当通过设备对象状态接口提供故障说明时,才会显示故障说明。
成员 | 数据类型 | 说明 |
|---|---|---|
Code | DINT | 为其查找说明的代码。 |
Desc | STRING | 给定代码的说明。 |
RAC_EVENTStructure
RAC_EVENT 结构由 RAC_ITF_DVC_PWRVELOCITY_STS 结构中的 FirstFault 和 FirstWarning 成员使用。这些项用于保存从驱动器接收到的驱动器事件历史记录中第一个驱动器故障和第一个驱动器警告记录的事件数据。
成员 | 数据类型 | 说明 |
|---|---|---|
类型 | DINT | 事件类型: 1 = 状态, 2 = 警告, 3 = 故障, 4 ...n = 用户。 |
ID | DINT | 可以由用户定义的事件 ID。 |
类别 | DINT | 可以由用户定义的类别(电气、机械、材料、实用工具等)。 |
Action | DINT | 可以由用户定义的事件操作代码。 |
值 | DINT | 可以由用户定义的事件值或故障代码。 |
Message | STRING | 事件消息文本。 |
EventTime_L | LINT | 事件时戳(64 位微秒格式)。 |
EventTime_D | DINT[7] | 事件时戳(年、月、日、时、分、秒、微秒格式)。 |
报警
为以下成员定义了基于离散 Logix 标签的报警:
成员 | 报警名称 | 说明 |
|---|---|---|
Sts_FailToStart | Alm_FailToStart | 驱动器在收到启动命令时无法在已分配的时间内启动。 |
Sts_FailToStop | Alm_FailToStop | 驱动器在收到停止命令时无法在已分配的时间内停止。 |
Sts_IntlkTrip | Alm_IntlkTrip | 驱动器已停止,互锁不正常 (OK)。 |
Sts_IOFault | Alm_IOFault | 驱动器与控制器通信失败。 |
Sts_DriveFault | Alm_DriveFault | 变量速度驱动器报告其存在故障状况。 |
将报警标记为已使用或未使用,并设置基于离散 Logix 标签的报警的标准配置成员。使用此格式访问报警元素:
Tag.@Alarms.AlarmName.AlarmElement
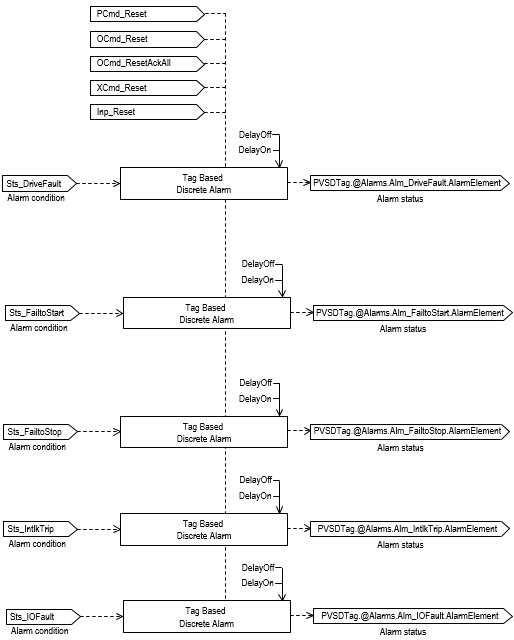
PVSD 指令使用以下报警:
- 当驱动器收到启动命令但未在配置的故障时间内收到运行反馈时,将引发“启动失败”报警。
- 当驱动器收到停止命令但运行反馈未处于配置的故障时间内时,引发“停止失败”报警。
- 当电机正在运行且互锁非正常 (OK) 条件导致电机停止时,引发“互锁脱扣”报警。如果互锁未被绕过,则可绕过互锁或不可绕过互锁的非正常 (OK) 状态将引发互锁脱扣。如果互锁被绕过,则只有不可绕过互锁非正常 (OK) 状态将引发互锁脱扣。
- 当与变量速度驱动器的输入/输出 (I/O) 通信丢失时,将引发输入/输出 (I/O) 故障报警。对于电源设备接口,会在 Ref_Ctrl_Sts.Connected 位变为假(变为 0)时检测到这种情况。对于当 Ref_Ctrl_Sts 为 NULL 时使用的离散信号接口,当 Inp_IOFault 变为真(变为 1)时会检测到这种情况。
- 当驱动器报告驱动器故障状况时,引发“驱动器故障”报警。对于电源速度设备接口,当 Ref_Ctrl_Sts.Faulted 位变为真(变为 1)时,会检测到这种情况。对于在 Ref_Ctrl_Sts 为 NULL 时使用的离散信号接口,当 Inp_Faulted 变为真(变为 1)时会检测到这种情况。
程序、操作员和外部命令可以重置已锁定的报警,并同时重置和确认指令的所有报警(报警集)。下图显示了命令与 PVSD 指令的交互方式。
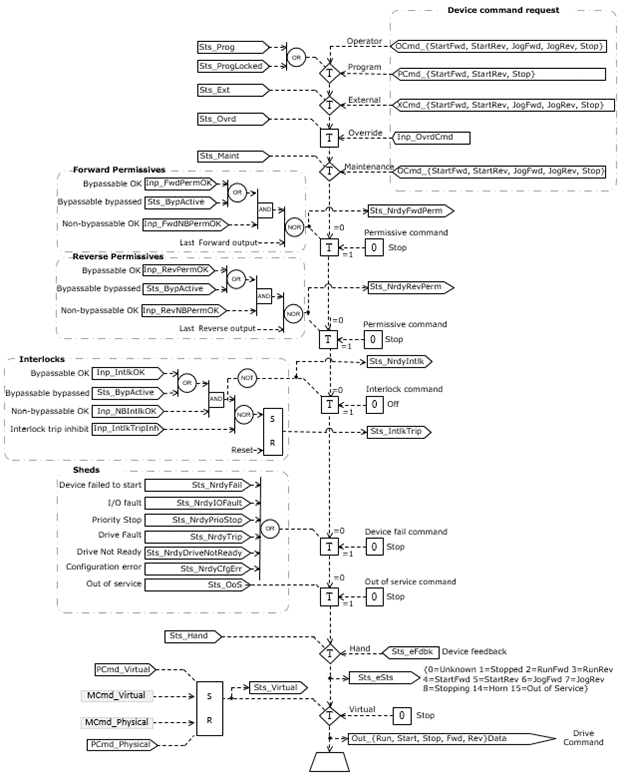
操作
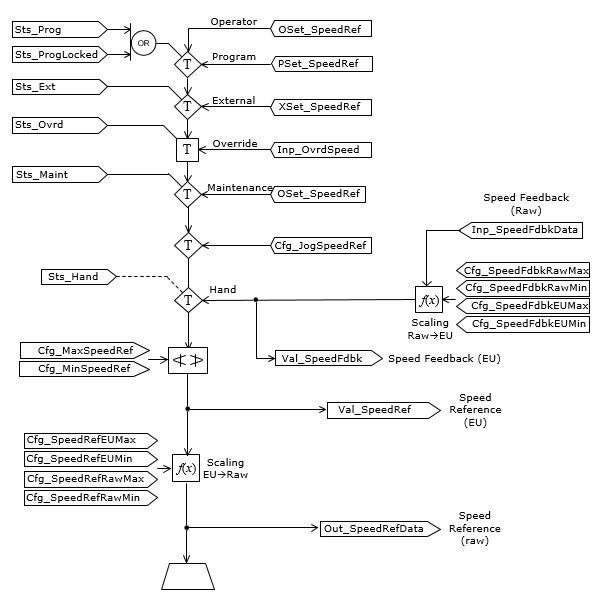
下图展示了 PVSD 指令的功能:
第二张图说明了驱动器速度参考(设定值)和驱动器速度反馈的处理方式:
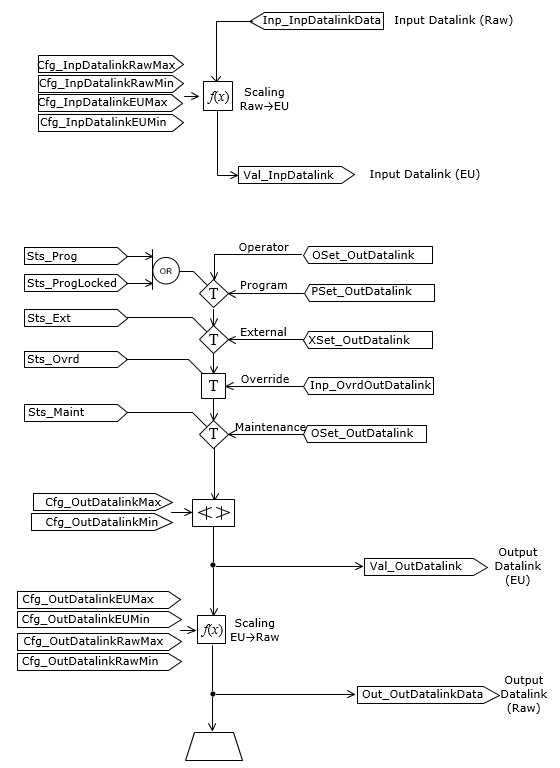
第三张图说明了可选输入数据链接和输出数据链接功能的处理方式:
监控 PVSD 指令
使用 PlantPAx 过程对象库中的操作员面板进行监控。
影响数学状态标志
编号
严重/轻微故障
没有特定于此指令的故障。请参见“数组索引编制”,了解关于数组索引故障的信息。
执行
梯形图
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 放弃首次扫描前收到的任何命令。电机断电,并被视为已受控停止。 |
指令首次运行 | 放弃首次扫描前收到的任何命令。对电机状态进行评估,并使指令与电机的当前状态一致,就像选择了手控命令源一样。 |
梯级输入条件为假 | 处理方式与通过命令停用电机时相同。电机输出断开,电机命令源在 HMI 上显示为程序停用。将清除所有报警。梯级输出条件仍旧为假。 |
梯级输入条件为真 | 将梯级输出条件设置为梯级输入条件。 指令执行。 |
后扫描 | 梯级输出条件设置为假。 |
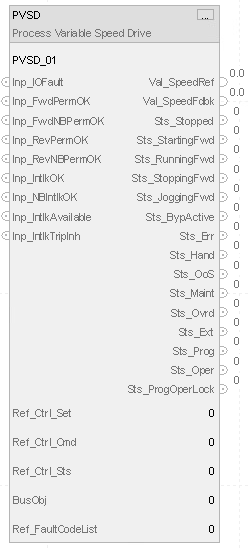
功能块图
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 放弃首次扫描前收到的任何命令。电机断电,并被视为已受控停止。 |
指令首次运行 | 放弃首次扫描前收到的任何命令。对电机状态进行评估,并使指令与电机的当前状态一致,就像选择了手控命令源一样。 |
指令首次扫描 | 请参阅“功能块图”表中的“指令首次运行”行。 |
EnableIn 为假 | 处理方式与通过命令停用电机时相同。电机输出断开,电机命令源在 HMI 上显示为程序停用。将清除所有报警。EnableOut 设置为假。 |
EnableIn 为真 | EnableOut 设置为真。 指令执行。 |
后扫描 | EnableIn 和 EnableOut 位设置为假。 |
结构化文本
在结构化文本中,EnableIn 在普通扫描期间始终为真。因此,如果指令处于由逻辑激活的控制路径中,指令将会执行。
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 请参阅“功能块图”表中的“预扫描”行。 |
指令首次运行 | 请参阅“功能块图”表中的“指令首次运行”行。 |
EnableIn 为真 | 请参阅“功能块图”表中的“EnableIn 为真”行。 |
后扫描 | 请参阅“功能块图”表中的“后扫描”行。 |
示例
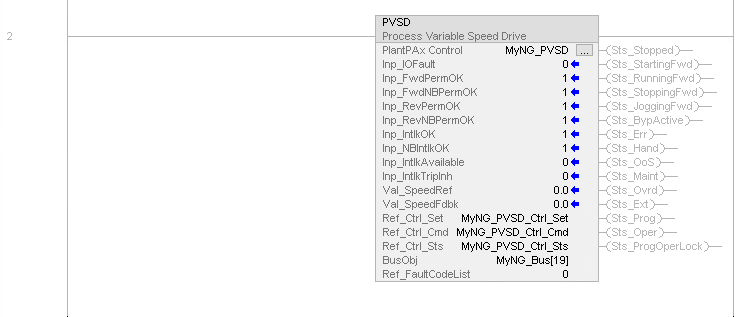
在下例中,使用前三个引用(InOut 参数)标签与 Commercial Engineering 提供的电源速度设备对象进行交互。这些标签为驱动器提供速度参考设置,为驱动器提供各种激活(启动)、停用(停止)和清除故障命令,还提供驱动器的驱动器状态(包括活动(正在运行)、实际速度、受控方向、实际方向、故障和警告信息以及测试)。下一个 InOut 参数将此驱动器链接到层次结构中的相关设备、控制模块、设备模块和单元总线,用于扇出命令并汇总状态和报警信息,以供复杂的控制策略和序列使用。
在本例中,由于从电源速度设备对象接收到文本故障信息,并且在此实例中不需要查找故障代码,因此不使用故障代码列表参数。
梯形图
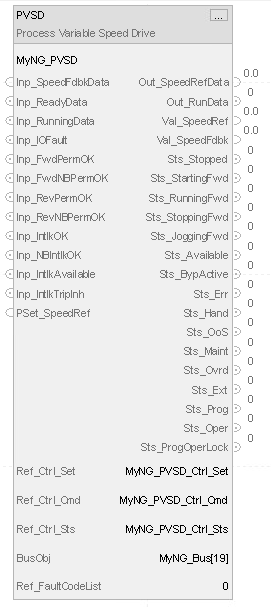
功能块图
结构化文本
PVSD(MyNG_PVSD, MyNG_PVSD_Ctrl_Set, MyNG_PVSD_Ctrl_Cmd, MyNG_PVSD_Ctrl_Sts, MyNG_Bus[19], 0)
提供反馈