微分 (DERV)
此信息适用于 CompactLogix 5370、ControlLogix 5570、Compact GuardLogix 5370、GuardLogix 5570、Compact GuardLogix 5380、CompactLogix 5380、ControlLogix 5580、GuardLogix 5580 和 ControlLogix 5590 控制器。
DERV 指令用于计算信号随时间的变化量,以单位/秒表示。
可用语言
梯形图
此指令不可用于梯形图中。
功能块
结构化文本
DERV(DERV_tag);
操作数
功能块
操作数 | 类型 | 格式 | 说明 |
|---|---|---|---|
DERV tag | DERIVATIVE | 结构 | DERV 结构 |
DERIVATIVE 结构
输入参数 | 数据类型 | 说明 |
|---|---|---|
EnableIn | BOOL | 启用输入。如果为假,指令不会执行,也不会更新输出。 默认值为真。 |
In | REAL | 指令的模拟信号输入。 有效值 = 任意浮点值 默认值 = 0.0 |
Gain | REAL | 微分乘法器 有效值 = 任意浮点值 默认值 = 1.0 |
ByPass | BOOL | 绕过算法请求。ByPass 为真时,指令会设置 Out = In。 默认值为假。 |
TimingMode | DINT | 选择时序执行模式。 0 = 周期性模式 1 = 过采样模式 2 = 实时采样模式 有关时序模式的更多信息,请参见“功能块属性”部分 有效值 = 0 至 2 默认值 = 0 |
OversampleDT | REAL | 过采样模式的执行时间。 有效值 = 0 到 4194.303 秒 默认值 = 0 |
RTSTime | DINT | 实时采样模式的模块更新周期 有效值 = 1 至 32,767 ms 默认值 = 1 |
RTSTimeStamp | DINT | 实时采样模式的模块时戳值。 有效值 = 0 至 32,767 ms 默认值 = 0 |
输出参数 | 数据类型 | 说明 |
|---|---|---|
EnableOut | BOOL | 指示指令是否处于启用状态。如果 Out 溢出,则设置为假。 |
Out | REAL | 计算所得的算法输出。 |
DeltaT | REAL | 两次更新间隔的时间。控制算法计算过程输出所用的时间(秒)。 |
Status | DINT | 功能块的状态。 |
InstructFault (Status.0) | BOOL | 该指令检测到以下执行错误之一。这不是轻微或严重的控制器错误。检查其他状态位以确定发生的情况。 |
TimingModeInv (Status.27) | BOOL | TimingMode 值无效。 有关时序模式的更多信息,请参见“功能块属性”部分。 |
RTSMissed (Status.28) | BOOL | 仅用于实时采样模式。在以下情况下设置为真 ABS (DeltaT - RTSTime) > 1 毫秒。 |
RTSTimeInv (Status.29) | BOOL | RTSTime 值无效。 |
RTSTimeStampInv (Status.30) | BOOL | RTSTimeStamp 值无效。 |
DeltaTInv (Status.31) | BOOL | DeltaT 值无效。 |
结构化文本
操作数 | 类型 | 格式 | 说明 |
|---|---|---|---|
DERV tag | DERIVATIVE | 结构 | DERV 结构 |
有关结构化文本中表达式语法的详细信息,请参见“结构化文本语法”部分。
说明
DERV 指令支持旁路输入,从而停止计算微分并将信号直接传递到输出。
Bypass 为以下条件时 | 指令使用此公式 |
|---|---|
清零且 DeltaT > 0 | 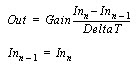 其中,DeltaT 以秒为单位。 |
设置 |  |
影响数学状态标志
否
严重/轻微故障
没有特定于此指令的故障。有关操作数相关的故障,请参见“通用属性”。
执行
功能块
条件/状态 | 执行的操作 |
|---|---|
预扫描 | EnableIn 和 EnableOut 位设置为假。 |
Tag.EnableIn 为假 | EnableIn 和 EnableOut 位设置为假。 结构化文本:不适用 |
Tag.EnableIn 为真 | EnableIn 和 EnableOut 位设置为真。 指令执行。 |
指令首次运行 | 不适用 |
指令首次扫描 | 重新计算系数。 |
后扫描 | EnableIn 和 EnableOut 位设置为假。 |
结构化文本
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 请参见“功能块”表中的“预扫描”行。 |
正常执行 | 请参见“功能块”表中的“Tag.EnableIn 为真”行。 |
后扫描 | 请参见“功能块”表中的“后扫描”行。 |
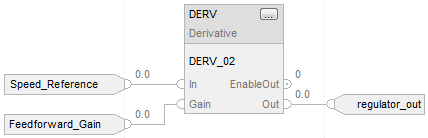
示例
本示例是 DERV 功能块最基本的合法编程方法,仅用于展示该指令的纯文本内容和生成的代码。本示例仅供内部使用,并非可测试的用例。
功能块
结构化文本
DERV_01.In := Speed_Reference;
DERV_01.Gain := Feedforward_Gain;
DERV(DERV_01);
PI_01.In := Speed_Reference - Speed_feedback;
PI_01.Kp := Proportional_Gain;
PI_01.Wld := Integral_Gain;
PI(PI_01);
regulator_out := DERV_01.Out + PI_01.Out;
提供反馈