轴属性 (S-Z)
下表介绍首字母为 S-Z 的轴属性。要查看其他属性或要了解如何访问属性,请单击以下主题之一。
- 属性轴类型数据类型访问说明安全中断模式激活状态AXIS_SERVO_DRIVEBOOL标签该位用于指示Kinetix驱动器的安全中断电路的状态。如果该位:ON - 驱动器安全监视电路出现 Enable_1 或 Enable_2 的信号丢失。OFF - 驱动器安全监视电路没有出现 Enable_1 或 Enable_2 故障。请注意,如果Kinetix驱动器通过此位将此状态传递回控制器,驱动器的固件版本必须为版本 1.85 或更高版本。SERCOS 错误代码AXIS_SERVO_DRIVEINTGSV*标签由 SERCOS 模块返回的错误代码,指示驱动器参数更新故障的根源。SERCOS 错误代码值可用于识别导致轴配置故障的驱动器参数更新故障的根源。此属性的错误代码源自 IEC-1394 SERCOS 接口标准。SERCOS 故障AXIS_SERVO_DRIVEBOOL标签当请求的 SERCOS 程序无法正常执行或相关驱动器节点检测到 SERCOS 通信故障时置位。SERCOS 环网故障AXIS_SERVO_DRIVEBOOL标签如果该位置位,则表示 SERCOS 环网出现问题;也就是说,灯已经损坏或者驱动器已经断电。伺服动作状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签如果该位:ON-轴处于伺服控制之下。OFF-伺服动作处于禁用状态。伺服故障AXIS_SERVODINT标签用于以一个 32 位字访问所有伺服故障位。该标签与伺服故障位属性相同。伺服故障位正向软超程故障0负向软超程故障1保留2保留3反馈故障4反馈噪声故障5保留6保留7正向误差故障8驱动器故障9这些故障位在每个近似更新周期都会进行更新。是否希望在出现上述任一故障时向控制器指示严重故障?是-将运动组的“常见故障类型”设为严重故障。否 - 必须编写代码处理这些故障。伺服故障位AXIS_SERVODINTGSV*用于以一个 32 位字访问所有伺服故障位。该属性与“伺服故障”标签相同。伺服故障位正向软超程故障0负向软超程故障1保留2保留3反馈故障4反馈噪声故障5保留6保留7正向误差故障8驱动器故障9这些故障位在每个近似更新周期都会进行更新。是否希望在出现上述任一故障时向控制器指示严重故障?是-将运动组的“常见故障类型”设为严重故障。否-必须编写代码处理这些故障。伺服反馈类型AXIS_SERVOSINTGSV该属性用于选择反馈类型。0 = A 与 B 正交 (AQB)1 = 同步串行接口 (SSI)2 = 线性位移传感器 (LDT)A B 正交编码器接口 (AQB)伺服模块(例如 175-6M02AE)提供硬件接口,用以支持配备标准 5 伏特差分编码器接口信号的增量式正交编码器。该硬件接口可提供稳定的差分编码器输入接口,在将各编码器信号应用于编码器转数字转换器 (EDC) FPGA 之前对其进行调节。EDC 会对编码器信号进行解码,并使用 16 位双向计数器对反馈计数进行累计。应用于 EDC 的常规计时器事件信号同时锁定所有轴的编码器计数器。此同一计时器事件信号还会触发执行伺服环计算的伺服中断服务例程。中断服务例程首先执行的操作之一是从 EDC 读取已锁定的编码器计数器值。编码器计数器值与上一次计时器事件的变化会计算出来,并且该差值将加到表示轴实际位置的 32 位有符号整型位置累加器中。“实际位置”值将用作位置伺服环的反馈,以及监视事件处理程序的输入。位置差值表示速度反馈,当如此配置时,可以对其进行滤波并将其应用于速度伺服内环。同步串行接口 (SSI)某些伺服模块(如 1756-M02AS)可与带有同步串行接口 (SSI) 输出的传感器对接。SSI 输出使用标准 5V 差分信号 (RS422),将信息由传感器传输到控制器。这些信号由控制器产生的时钟信号和传感器产生的数据信号组成。每个带有 SSI 输出的传感器提供的输出数据均为指定位数的二进制或格雷码数据。控制器必须以正确的位数及传感器所支持的频率产生时钟脉冲流。可通过伺服轴对象配置伺服模块,以产生 8 至 32 个时钟脉冲,其频率可设置为 208kHz 或 650kHz。时钟信号在脉冲串之间始终保持高电平状态。传感器会在每个时钟信号的上升沿将数据线上第一个 MSB 移出。数据移出之前和之后,传感器会将数据信号保持在指定状态。控制器将检查这些状态,防止传感器丢失或线路断开。现场可编程门阵列 (FPGA) 用于实现控制器的多通道 SSI 接口。每个通道具有相同功能。线性位移传感器 (LDT)伺服模块(如 1756-HYD02)使用线性磁致伸缩位移传感器 (LDT)。现场可编程门阵列 (FPGA) 用于实现多通道 LDT 接口。每个通道具有相同功能,可以最大 240,000 的计数与 LDT 设备对接。LDT 接口具有传感器故障检测和数字滤波功能,可以减少电噪声。FPGA 可连接两种类型的 LDT:启动/停止和 PWM。启动/停止传感器在收到输入(询问)信号时,启动测量周期,并在返回线上以两个脉冲进行应答。两个脉冲之间的时间与位置成正比。PWM 传感器则在返回线上以单个长脉冲来应答询问信号。脉冲宽度与位置成正比。FPGA 在每个伺服更新时间生成询问信号,并测量启动/停止脉冲之间的时间或 PWM 脉冲宽度。位置测量的分辨率取决于用于测量时间的时钟频率。在 1756-HYD02 设计中,采用 60 MHz 的时钟,并利用时钟信号的两个边沿产生 8.3 纳秒的有效时间分辨率。这可以转换成小于 0.001 英寸的位置分辨率。小贴士: 如果使用配置为执行多次内部测量(再循环)并以脉冲宽度报告测量结果之和的 PWM 传感器,可实现更高的分辨率。伺服环配置AXIS_SERVOAXIS_SERVO_DRIVEINTGSVSSV当轴设置为“伺服”时,“伺服环配置”属性用于指定伺服环拓扑的具体配置。0 = 自定义1 = 仅反馈2 = 仅辅助反馈3 = 位置伺服4 = 辅助位置伺服5 = 双位置伺服6 = 双命令伺服7 = 辅助双命令伺服8 = 速度伺服9 = 转矩伺服10 = 双命令/反馈伺服伺服输出水平AXIS_SERVOREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。伺服输出电压水平伺服输出水平值为指定轴伺服输出的当前电压电平。“伺服输出水平”值可用在钻孔应用中,例如,在该应用中,伺服模块与外部转矩环伺服驱动器对接,以检测钻头何时与工件表面接触。伺服极性位AXIS_SERVODINTGSV0 = 负反馈极性1 = 负伺服极性负反馈极性“负反馈极性”位属性用于控制编码器反馈的极性,进行正确配置后,可以确保在轴沿用户定义的正方向运动时,轴实际位置值增加。该位可通过 MRHD 和 MAHD 运动控制指令自动配置。负伺服极性“负伺服极性”位属性用于控制进入驱动器的伺服输出的极性。正确配置该位和“负反馈极性”位后,对于闭合轴伺服环,可以确保伺服环是负反馈闭环系统,而非不稳定的正反馈系统。该位可通过 MRHD 和 MAHD 运动控制指令自动配置。伺服状态AXIS_SERVODINT标签用于以 32 位字形式访问伺服环状态位。该标签与伺服状态位属性相同。伺服状态位伺服动作状态0驱动器使能状态1关闭状态2过程状态3输出限制状态4位置锁定状态5归零输入状态6记录 1 输入状态7记录 2 输入状态8保留9保留10驱动器故障输入状态11伺服状态位AXIS_SERVODINTGSV*用于以 32 位字形式访问伺服环状态位。该属性与“伺服状态”标签相同。伺服状态位伺服动作状态0驱动器使能状态1关闭状态2过程状态3输出限制状态4位置锁定状态5归零输入状态6记录 1 输入状态7记录 2 输入状态8保留9保留10驱动器故障输入状态11关闭状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签如果该位:ON—轴处于关闭状态。OFF—轴未处于关闭状态。软超程故障动作AXIS_SERVOAXIS_SERVO_DRIVESINTGSVSSV故障动作值关闭0禁用驱动器1停止运动2仅状态3SSI 时钟频率AXIS_SERVOSINTGSV0 = 208 kHz1 = 650 kHz该属性用于设置 SSI 设备的时钟频率 (kHz)。只有当传感器类型设置为 SSI 时,该属性才激活。SSI 代码类型AXIS_SERVOSINTGSV0 = 二进制码1 = 格雷码该属性用于设置 SSI 设备是使用二进制还是格雷码。只有当传感器类型设置为 SSI 时,该属性才激活。SSI 数据长度AXIS_SERVOSINTGSV该属性用于设置 SSI 设备的数据长度。只有当传感器类型设置为 SSI 时,该属性才激活。启动实际位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签启动实际位置,单位为位置单位每当为轴启动新的运动轨迹规划器指令时(例如,使用 MAM 指令),将在运动开始时立即存储轴给定位置和实际位置的值。这些值采用配置的轴位置单位,分别存储为“启动给定位置”和“启动实际位置”。启动位置可用于纠正事件检测与事件发起的动作之间发生的任何运动。例如,在线圈绕组应用中,可以在表达式中使用“启动给定位置”来补偿线筒末端的过冲(在反转传动方向之前)。如果知道传动方向应发生改变时的线圈位置以及实际发生改变时的位置(“启动给定位置”),则可以计算过冲量,并用它来校正线槽的位置(相对于线筒)。启动给定位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签启动给定位置,单位为位置单位每当为轴启动新的运动轨迹规划器指令时(例如,使用 MAM 指令),将在运动开始时立即存储轴给定位置和实际位置的值。这些值采用配置的轴位置单位,分别存储为“启动给定位置”和“启动实际位置”。启动位置可用于纠正事件检测与事件发起的动作之间发生的任何运动。例如,在线圈绕组应用中,可以在表达式中使用“启动给定位置”来补偿线筒末端的过冲(在反转传动方向之前)。如果知道传动方向应发生改变时的线圈位置以及实际发生改变时的位置(“启动给定位置”),则可以计算过冲量,并用它来校正线槽的位置(相对于线筒)。启动主轴偏移AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签启动主轴偏移,单位为主轴位置单位“启动主轴偏移”是指当执行最后一条运动轴运动 (MAM) 指令(运动类型设置为绝对式主轴偏移或增量式主轴偏移)时,应用到位置凸轮主轴侧的位置偏移。启动主轴偏移以主轴位置单位返回。“启动主轴偏移”的归位特性将与线性轴位置的归位特性相同。正在停止状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签当前正在执行停止过程时置位。停止过程完成后清零。停止过程用于使轴停止(由 MAS、MGS、停止规划器故障动作或模式变更引起)。停止时间限制AXIS_SERVO_DRIVEREALGSVSSV秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。停止转矩AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。抓拍实际位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签抓拍实际位置,单位为位置单位“抓拍实际位置”和“抓拍给定位置”属性用于在执行 MGSP(运动组抓拍位置)指令时同时存储轴的实际位置、给定位置和主轴偏移位置的快照。以配置的轴位置单位存储值。由于 MGSP 指令同时存储指定轴组中所有轴的实际位置和给定位置,因此可根据所得不同轴的“抓拍实际位置”和“抓拍给定位置”值执行实时计算。例如,在卷纸处理应用中,可比较两个轴之间的“抓拍实际位置”,从而实现转差补偿。抓拍给定位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签抓拍给定位置,单位为位置单位“抓拍实际位置”和“抓拍给定位置”属性用于在执行 MGSP(运动组抓拍位置)指令时同时存储轴的实际位置、给定位置和主轴偏移位置的快照。以配置的轴位置单位存储值。由于 MGSP 指令同时存储指定轴组中所有轴的实际位置和给定位置,因此可根据所得不同轴的“抓拍实际位置”和“抓拍给定位置”值执行实时计算。例如,在卷纸处理应用中,可比较两个轴之间的“抓拍实际位置”,从而实现转差补偿。抓拍主轴偏移AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签抓拍主轴偏移,单位为主轴位置单位“抓拍主轴偏移”属性是指执行最后一条运动组抓拍位置 (MGSP) 指令时,应用于位置凸轮主轴侧的位置偏移。抓拍主轴偏移以主轴位置单位返回。“抓拍主轴偏移”的归位特性将与线性轴位置的归位特性相同。通信类型AXIS_SERVO_DRIVEINTGSV设置为值 7,表示应用通信。请参见 IEC 1491 中的 IDN 15。正向测试方向AXIS_SERVOAXIS_SERVO_DRIVESINTGSV由 MRHD(运动运行连接测试)指令启动的最后一次连接测试期间,轴的行进方向。0 = 反向1 = 前向(正向)数据类型详细信息AXIS_SERVO该值不取决于“伺服极性位”属性。MAHD(运动应用连接测试)指令使用“正向测试方向”属性和“测试输出极性”属性来设置“伺服极性位”属性,以得到负反馈和正确的方向感知。AXIS_SERVO_DRIVE该值不取决于“驱动器极性”属性。MAHD(运动应用连接测试)指令使用“正向测试方向”属性和“测试输出极性”属性来设置“驱动器极性”属性,以得到正确的方向感知。测试增量AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV位置单位“电机反馈测试增量”属性与 MRHD(运动运行连接诊断)指令结合使用,用以确定 MRHD 启动的测试过程所需的运动量。通常情况下,该值设置为电机的约 1/4 转。测试状态AXIS_SERVOAXIS_SERVO_DRIVEINTGSV0 = 测试过程成功1 = 测试进行中2 = 测试过程由用户中止3 = 测试过程超时故障(约 2 秒)4 = 测试失败 - 伺服故障5 = 测试失败 - 测试增量不足AXIS_SERVO_DRIVE 数据类型的更多状态:6 = 测试失败 - 极性错误7 = 测试失败 - 丢失信号8 = 测试失败 - 设备通信错误9 = 测试失败 - 反馈配置错误10 = 测试失败 - 电机接线错误该属性返回最后一次在轴上启动连接诊断过程的 MRHD(运动运行连接诊断)指令的状态。可使用该属性确定 MRHD 启动的操作何时成功完成。但有些情况下,可能无法正常执行该操作。这种情况下,测试过程会自动中止并报告一个测试故障,该故障将存储在“测试状态”输出参数中。时间凸轮待处理状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签“时间凸轮”运动曲线正在等待当前执行的凸轮廓线完成时置位。如果执行 MATC 指令并且选择“待处理”执行计划,将引发该状态。当前时间凸轮廓线完成,引起待处理凸轮廓线启动时,该位清零。如果时间凸轮廓线完成或被其他运动操作取代,该位也将清零。时间凸轮状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签当前正在执行“时间凸轮”运动曲线时置位。时间凸轮完成或被其他运动操作取代时清零。时间事件故障AXIS_SERVOAXIS_SERVO_DRIVEBOOL标签如果该位置位,说明运动控制模块中用于将模块伺服环与机架主时基(即协调系统时间)同步的计时器事件存在问题。要将该位清零,请重新配置运动控制模块。给定转矩AXIS_SERVO_DRIVEREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。额定值的百分比以转矩模式运行时的给定值,以额定值百分比的形式表示。转矩数据变换AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 86。转矩数据变换扩展AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 94。转矩数据变换系数AXIS_SERVO_DRIVEDINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 93。转矩反馈AXIS_SERVO_DRIVEREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。额定值的百分比以转矩模式运行时的转矩反馈,以额定值百分比的形式表示。双极转矩限制AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比“转矩极限”属性提供了一种方法,基于电机连续电流/转矩额定值将电机的最大给定电流/转矩限定在指定水平。下图所示为在有和没有伺服转矩输出限制的情况下进入电机的伺服驱动器输出与位置伺服误差的函数关系。
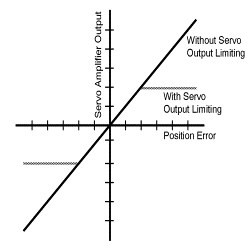 转矩限制以驱动器可指示的电机额定电流最大百分比的形式指定正向转矩或负向转矩。例如,如果转矩限制为 150%,则送入电机的电流将限定在电机连续额定电流的 1.5 倍。负向转矩限制AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。正向转矩限制AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。转矩限制源AXIS_SERVO_DRIVEDINTGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。该参数显示轴任何转矩限制的当前来源(如果有)。0 = 无限制1 = 负向转矩限制2 = 正向转矩限制3 = 放大器峰值限制4 = 放大器 I(t) 限制5 = 母线调节器限制6 = 双极转矩限制7 = 电机峰值限制8 = 电机 I(t) 限制转矩限制状态AXIS_SERVO_DRIVEBOOL标签当给定轴转矩的幅值大于所配置的转矩限制时,此位置位。转矩偏移AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV标签转矩偏移在 -100% 到 +100% 之间转矩偏移补偿可用于对速度伺服环的输出进行动态给定转矩修正。由于该值在每个近似更新周期同步更新,可通过功能块编程将转矩偏移应用到自定义外控制环算法。转矩极性AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器极性”属性。请参见 IEC 1491 中的 IDN 85。转矩变换AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV%/(位置单位/秒^2)“转矩变换”属性用于将伺服环的加速度转换为电机额定转矩的等效百分比值。这相当于将伺服环增益参数的单位进行“归一化”,使得这些值不受反馈分辨率、驱动器变换、电机和负载惯量及机械传动比变化的影响。事实上,只要设置正确,“转矩变换”值可以代表系统惯量,与“调谐惯量”属性值之间相差一个转换常数系数。AXIS_SERVO — “转矩变换”值通常在控制器自动调谐过程中由 MAAT 指令确定。AXIS_SERVO_DRIVE — “转矩变换”值通常由驱动器自动调谐过程确定。必要时,可使用以下公式手动计算该值。转矩变换 = 100 % 额定转矩 / (加速度 @ 100% 额定转矩)例如,如果该轴以电机转数 (rev) 为位置单位,并且在电机应用 100% 额定转矩的情况下,电机以 3000 转/秒^2的速率加速,则转矩变换属性值的计算方式如下:转矩变换 = 100 % 额定值 / (3000 RPS2) = 0.0333 % 额定值/(转/秒^2)请注意,如果转矩变换值未能反映系统加速特征的真实转矩,则增益也不会反映系统的真实性能。转矩阈值AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。转矩阈值状态AXIS_SERVO_DRIVEBOOL标签当物理轴转矩反馈的幅值小于所配置的转矩阈值时,此位置位。变换状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签如果该位:ON - 轴是激活变换的一部分。OFF - 轴不是活动坐标变换的一部分。调谐加速度AXIS_SERVOAXIS_SERVO_DRIVEREALGSV位置单位/秒2“调谐加速度”和“调谐减速度”属性将返回上次运行调谐过程中所测得的加速度和减速度值。在外部转矩伺服驱动器配置中,这些值用于计算轴的调谐惯量值,通常后续的 MAAT(运动应用轴调谐)指令还会使用这些值来确定最大加速度和最大减速度属性的调谐值。调谐加速时间AXIS_SERVOAXIS_SERVO_DRIVEREALGSV秒“调谐加速时间”和“调谐减速时间”属性以秒为单位返回上次运行调谐过程中所测得的加速和减速时间。这些值用于计算调谐加速度和调谐减速度属性。调谐减速度AXIS_SERVOAXIS_SERVO_DRIVEREALGSV位置单位/秒2“调谐加速度”和“调谐减速度”属性将返回上次运行调谐过程中所测得的加速度和减速度值。在外部转矩伺服驱动器配置中,这些值用于计算轴的调谐惯量值,通常后续的 MAAT(运动应用轴调谐)指令还会使用这些值来确定最大加速度和最大减速度属性的调谐值。调谐减速时间AXIS_SERVOAXIS_SERVO_DRIVEREALGSV秒“调谐加速时间”和“调谐减速时间”属性以秒为单位返回上次运行调谐过程中所测得的加速和减速时间。这些值用于计算调谐加速度和调谐减速度属性。调谐惯量AXIS_SERVOAXIS_SERVO_DRIVEREALGSV%/(兆计数/秒2)“调谐惯量”值表示根据调谐过程中的测量值计算得到的轴总惯量。实际上,调谐惯量的单位不是行业标准的惯量单位,而是反馈输入的驱动器额定输出 %/(兆计数/秒2)。这种情况下,它代表转矩伺服驱动器的输入增益。对于伺服控制器而言,这些单位可以更为有效地描述系统惯性。MAAT(运动应用轴调谐)指令使用调谐惯量值来计算转矩变换值。如果调谐惯量值超过 100% 额定值/(兆计数/秒2),则可能会因速度估计量产生过多数字化噪声,从而影响数字伺服环的性能。这些噪声会由转矩增益而放大,而转矩增益与调谐惯例系数相关并且会传递给驱动器的转矩输出。因此,较高的调谐惯量值会激发机械共振,并且会因转矩波动较大而导致电机过热。解决这一问题的唯一方法是降低环路带宽,并有选择地应用一些输出滤波。由于调谐惯量值表示真实系统惯量的测量值,所以当驱动相对电机而言过高的惯量负载(即高惯量失配)时,会出现这种情况。但如果所用驱动器相对电机而言过小,或者系统的反馈分辨率过低,也会出现这种情况。通常,调谐惯量越低,数字伺服环的性能越接近模拟伺服系统的性能。可通过计算调谐惯量(% 额定值/MCPS)和速度伺服带宽(赫兹)的乘积,来直接量化噪声等级。调谐算法可根据该乘积采取措施,以限制高频噪声进入电机。对于调谐惯量与带宽的乘积为 1000 或更高的电机,可应用滤波带宽为速度伺服带宽 5 倍(赫兹)的低通滤波器。这样,低通滤波器引入的相位滞后量将限制在 12 度左右,相对于典型调谐伺服系统 30 到 60 度的相位裕度而言,这个数值较小。使用 200 Hz 的典型调谐低通滤波器带宽值时,1 KHz 范围内的高频量化噪声大约会衰减 5 倍。当调谐惯量与带宽的乘积达到 4000 或更高时,仅使用低通滤波器将不足以控制量化噪声等级。所以调谐算法开始按 4000/(调谐惯量 * 速度伺服带宽) 的比率来减小系统带宽。这样,量化噪声等级将保持在一个固定值,而与调谐惯性和带宽的乘积无关。例如,对于调谐惯性值为 213 且速度伺服带宽为 41 Hz(惯量与带宽的乘积为 8733)的电机,将以 46 的位置比例增益和 117 的速度比例增益进行调谐,并且低通滤波器带宽为 93。这是一个合理的无噪声增益集。调谐上升时间 (Tune Rise Time)AXIS_SERVOREALGSV秒“调谐上升时间”属性返回调谐过程中测得的轴上升时间。该值仅适用于与外部速度伺服驱动器连接的轴。在这种情况下,可使用“调谐上升时间”属性值计算调谐速度带宽。调谐速度变换AXIS_SERVOREALGSV%/(千计数/秒)“调谐速度变换”属性返回调谐过程中测得的轴驱动变换系数。该值仅适用于与外部速度伺服驱动器连接的轴。在这种情况下,后续 MAAT(运动应用轴调谐)指令可直接将“调谐速度变换”属性值应用到“速度变换”属性。调谐状态AXIS_SERVOAXIS_SERVO_DRIVEINTGSV0 = 调谐过程成功1 = 调谐进行中2 = 调谐过程由用户中止3 = 调谐过程超时4 = AXIS_SERVO - 调谐过程因伺服故障而失败4 = AXIS_SERVO_DRIVE - 调谐过程因驱动器故障而失败5 = 轴达到调谐行程限位6 = 轴极性设置错误用于 AXIS_SERVO_DRIVE 的更多代码:7 = 调谐测量故障8 = 调谐配置故障“调谐状态”属性返回上一次运行 MRAT(运动运行轴调谐)指令的状态,该指令可启动目标轴调谐过程。可使用该属性确定 MRAT 启动的操作何时成功完成。但有些情况下,控制器可能无法正常执行该操作。这种情况下,调谐过程会自动中止并报告一个调谐故障,该故障将存储在“调谐状态”输出参数中。调谐配置位AXIS_SERVOAXIS_SERVO_DRIVEDINTGSVSSV位0 = 反向调谐方向1 = 调谐位置误差积分器2 = 调谐速度误差积分器3 = 调谐速度前馈4 = 调谐加速度前馈5 = 调谐输出低通滤波器6 = 双向调谐7 = 调谐摩擦力补偿8 = 调谐转矩偏移反向调谐方向反向调谐方向位用于确定调谐过程的方向。如果该位置位(真),则以反向(或负向)方向开始运动。调谐位置误差积分器如果该位为:ON - 调谐过程计算位置积分增益。OFF - 调谐过程将位置积分增益置为 0。调谐速度误差积分器如果该位为:ON - 调谐过程计算速度积分增益。OFF - 调谐过程将速度积分增益置为 0。调谐速度前馈如果该位为:ON - 调谐过程计算速度前馈增益。OFF - 调谐过程将速度前馈增益设置为 0。调谐加速度前馈如果该位为:ON - 调谐过程计算加速度前馈增益。OFF - 调谐过程将加速度前馈增益设置为 0。调谐输出低通滤波器如果该位为:ON - 调谐过程计算输出滤波器带宽。OFF - 调谐过程将输出滤波器带宽设置为 0,即禁用滤波器。双向调谐“双向调谐”位用于确定调谐过程的方向是单向还是双向。如果该位置位(真),则首先以指定调谐方向启动调谐运动曲线,然后在相反方向上重复调谐运动曲线。双向调谐曲线返回的信息可用于摩擦力补偿和转矩偏移调谐。当配置为液压外部驱动类型时,双向调谐算法还会计算方向变换比。调谐摩擦力补偿该调谐配置仅在双向调谐模式下有效。如果该位为:ON - 调谐过程计算摩擦力补偿增益。OFF - 摩擦力补偿不受影响。调谐转矩偏移该调谐配置仅在双向调谐模式下有效。如果该位为:ON - 调谐过程计算转矩偏移。OFF - 转矩偏移不受影响。调谐速度AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV位置单位/秒“调谐速度”属性用于设置调谐过程的最大速度。在运行调谐过程前,应将该属性设置为所需的电机最大工作速度(工程单位)。调谐过程将根据加速或减速至调谐速度的斜坡测量最大加速度和减速度。因此,若调谐所用的速度并非系统所需的工作速度,所测得的加速度和减速度的精度会降低。调谐转矩AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV%“调谐转矩”属性用于确定调谐过程的最大转矩。在运行调谐过程前,应将该属性设置为所需的最大安全转矩水平。默认值是 100%,此时测得的系统加速度和减速度最为准确。在有些情况下,为限制调谐过程中对机械设备产生的压力,可能需要采用较小的调谐转矩限制值。在这种情况下,系统的加速度和减速度可根据调谐转矩与系统最大转矩输出之比进行推算。请注意,随着“调谐转矩”值减小,外推误差会增大。调谐行程限位AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV位置单位“调谐行程限位”属性用于限制调谐过程中轴的行程。如果轴在超过调谐行程限位之前无法完成调谐过程,则运动控制模块将停止调谐过程,并通过“调谐状态”属性报告已超出调谐行程限位。但这并不意味着已经超出调谐行程限位,而是指调谐程序完成时会超出行程限位。速度数据变换AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 44。速度数据变换扩展AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 46。速度数据变换系数AXIS_SERVO_DRIVEDINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 45。速度下调AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。速度误差AXIS_SERVOAXIS_SERVO_DRIVEREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。速度误差,单位为位置单位/秒速度误差是轴的给定速度与实际速度之差,以配置的轴“位置单位/秒”表示。对于已激活速度伺服环的轴,速度误差与其他误差项共同用来驱动电机,使其达到速度反馈与给定速度相等的状态。速度反馈AXIS_SERVO AXIS_SERVO_DRIVEREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。速度反馈,单位为位置单位/秒速度反馈是运动控制模块估算的轴实际速度,以配置的轴位置单位/秒表示。估算速度是在伺服更新间隔内对实际位置的变化应用 1 kHz 低通滤波器而计算出来的。速度反馈是有符号的值,符号(+ 或 -)取决于轴当前运动的方向。速度反馈增益AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV%伺服驱动器需要非零的命令输入,用以产生稳定的轴加速度或速度。要从伺服模块获得非零输出,需要有非零的位置或速度误差。这一在运动过程中的动态误差称为“跟踪误差”。我们应尽量避免非零跟踪误差。理想情况下,我们希望跟踪误差始终为零。这可以通过上述位置积分增益控制来实现,但积分器动作的响应时间通常会因过慢而无效。要获得更佳的动态响应,另一种方法是使用速度和加速度前馈。“速度前馈增益”属性用于提供生成给定速度所需的给定速度输出。将当前给定速度经速度前馈增益进行变换,然后以偏移形式加到由位置环控制元件产生的给定速度,即可实现此操作。完成此操作后,位置环控制元件不需对给定速度产生很大影响,从而显著减小位置误差值。因此,当以固定速度运行时,“速度前馈增益”使伺服系统的跟踪误差下降到接近于零。对于任何时候实际轴位置都不能明显滞后于给定位置的电子传动和同步应用等应用场合,这一点非常重要。理论上,最佳的“速度前馈增益”值为 100%。但实际上,可能需要在考虑速度环增益有限及其他应用考量事项的基础上对该值进行调整。当前馈增量可能加重轴的过冲情况时,可能会强制使用较小的速度前馈值。如有必要,可以运行一个简单的用户程序,使轴沿正方向点动,并监视点动期间轴的位置误差,以调整原为 100% 的速度前馈增益。应增大速度前馈增益,直至恒定速度下的位置误差尽可能小,但仍为正值。如果恒定速度下位置误差为负值,轴的实际位置将在给定位置前面。如果发生这种情况,应降低速度前馈增益,使位置误差再次为正值。请注意,必须输入合理的最大速度、加速度和减速度值,才能使轴点动。速度积分增益AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV1/ms-s在转矩(电流)环伺服驱动器模式下,每次进行伺服更新时,当前速度误差都会在称为“速度积分误差”的变量中进行累加。该值与速度积分增益相乘得到“伺服输出”或“给定转矩”的一个分量,用于尝试修正速度误差。但“速度 I 增益”修正的特点是,任何非零“速度误差”都会实时累加,以便产生足够的力来进行修正。“速度 I 增益”的这一特性使得其非常适用于具有严苛速度精度要求的应用。速度 I 增益值越大,轴驱动到零速度误差状态就越快。然而遗憾的是,“I 增益”控制本身并不稳定。“I 增益”过大将导致轴振动和伺服系统不稳定。某些情况下,“速度 I 增益”控制处于禁用状态。其中一种情况是,当进入轴驱动器的伺服输出饱和时。在这种情况下,连续的积分控制行为只会加重这种状况。另一种常见情况是当执行特定运动时。当“积分器挂起使能”属性置位时,伺服环将在设定的运动期间自动禁用积分器。由于积分增益在本质上具有不稳定性,建议将“位置积分增益”和“速度积分增益”视为互斥项。如果应用环境需要“积分增益”,则使用其中之一,而不要同时使用这两者。通常,当需要静态定位准确性时,最好选择速度积分增益。典型的速度积分增益值为约 15 ms-1-s-1。对于 AXIS_SERVO_DRIVE 数据类型:虽然“速度 I 增益”(如果使用)通常由自动伺服调谐过程确定,但用户也可手动设置“速度 I 增益”值。在这样做之前,必须为驱动系统确定轴的转矩变换系数。有关如何计算转矩变换系数的说明,请参见转矩变换属性的描述。完成此操作后,就可以使用以下公式根据“速度 P 增益”的当前值或计算值计算“速度 I 增益”:速度 I 增益 = 0.25 * 0.001 s/ms * (速度 P 增益)2假定“速度 P 增益”值为 0.25 s-1,得到的“速度 P 增益”值约为 15.6 ms-1-s-1-。速度反馈误差AXIS_SERVOAXIS_SERVO_DRIVEREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。速度积分器误差,单位为位置单位 – 毫秒/秒速度积分器误差是指定轴速度误差的运行总和,以指定轴位置单位/秒表示。对于已激活速度伺服环的轴,速度积分器误差与其他误差项共同用来驱动电机,使其达到速度反馈与给定速度相等的状态。双极速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。负向速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。正向速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。速度限制状态AXIS_SERVO_DRIVEBOOL标签当速度伺服环输入的给定速度幅值大于所配置的速度限制时,此位置位。速度锁定状态AXIS_SERVO_DRIVEBOOL标签当物理轴速度反馈的幅值处于所配置的当前给定速度的速度窗口范围内时,此位置位。速度偏移AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV标签速度偏移,以位置单位/秒表示速度偏移补偿可用于对位置伺服环的输出进行动态速度修正。由于该值在每个近似更新周期同步更新,可通过功能块编程将速度偏移应用到自定义外控制环算法。速度极性AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器极性”属性。请参见 IEC 1491 中的 IDN 42。速度比例增益AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV1/秒AXIS_SERVO在转矩(电流)环伺服驱动器模式下,伺服模块的数字速度环可在不需要模拟转速计的情况下提供阻尼。“速度误差”与“速度比例增益”相乘得到伺服输出或给定转矩的一个分量,并最终用于尝试修正速度误差,从而产生阻尼效果。因此,增大“速度比例增益”将产生更平滑的运动、增大加速度、减少超程并提高系统稳定性。速度环还支持使用更高的有效位置环增益值,但速度比例增益过大会产生高频不稳定和共振效果。请注意,速度比例增益的单位与位置比例增益的单位相同,因此便于执行标准的英寸/分钟/密尔计算来确定静态刚度或阻尼。最大带宽基于伺服驱动器转矩环的动力学状况和所需系统阻尼系数 Z,速度环所能达到的最大带宽存在限制。这些限制可表示如下:带宽(速度)= 0.25 * 1/Z2* 带宽(转矩)例如,如果驱动器转矩环的带宽为 100 Hz,阻尼系数 Z 为 0.8,则速度带宽约为 40 Hz。根据这个数字,可以计算出环的相应增益。请注意,转矩环的带宽包括反馈采样延时和滤波时间常数。伺服模块配置为速度环伺服驱动器时,不使用运动控制器中的速度环。因此在这种情况下不需要确定速度比例增益。典型的速度比例增益值约为 250 秒-1。AXIS_SERVO_DRIVE标准 RA SERCOS 驱动器的数字速度环可在无需模拟转速计的情况下提供阻尼。“速度误差”与“速度比例增益”相乘得到给定转矩,并最终用于尝试修正速度误差,从而产生阻尼效果。因此,增大“速度比例增益”将产生更平滑的运动、增大加速度、减少超程并提高系统稳定性。速度环还支持使用更高的有效位置环增益值,但速度比例增益过大会产生高频不稳定和共振效果。请注意,速度比例增益的单位与位置比例增益的单位相同,因此便于执行标准的计算来确定阻尼和带宽。如果已知所需速度伺服的统一增益带宽(赫兹),可使用如下公式计算相应的 P 增益。速度 P 增益 = 带宽(赫兹)/6.28现代的速度伺服系统通常以约 40 赫兹的统一增益带宽运行。典型的速度比例增益值约为 250 秒-1。最大带宽基于系统内部转矩环的动力学状况和所需系统阻尼系数 Z,速度环所能达到的最大带宽存在限制。这些限制可表示如下:带宽(速度)= 0.25 * 1/Z2* 带宽(转矩)例如,如果驱动器转矩环的带宽为 100 Hz,阻尼系数 Z 为 0.8,则速度带宽约为 40 Hz。根据这个数字,可以计算出环的相应增益。请注意,转矩环的带宽包括反馈采样延时和滤波时间常数。速度变换AXIS_SERVOREALGSVSSV%/(位置单位/秒)“速度变换”属性用于将伺服环输出转换为提供给外部速度伺服驱动器的等效电压。这相当于将伺服环增益参数的单位进行“归一化”,使得这些值不受反馈分辨率、驱动器变换或机械传动比变化的影响。“速度变换”值通常由伺服驱动器的自动调谐过程确定,但在必要时也可使用以下公式计算这些值。如果轴使用速度伺服驱动器,则伺服模块中的软件速度环处于禁用状态。在这种情况下,可以使用以下公式来计算速度变换值:速度变换 = 100%/(速度 @ 100 %)例如,如果该轴使用电机转数作为位置单位(转),并且伺服驱动器的变换系数为,输入为 100%(例如 10 伏)时电机速度为 5,000 RPM(即 83.3 RPS),则转矩变换属性值的计算方式如下。速度变换 = 100%/(83.3 RPS) = 1.2 %/(转/秒)速度伺服带宽AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV赫兹“速度伺服带宽”值代表统一增益带宽,可用于计算后续 MAAT(运动应用轴调谐)指令的增益。统一增益带宽是一种频率,超过该频率后速度伺服不能提供任何有意义的位置干扰校正。通常,在确保伺服系统稳定的情况下,速度伺服带宽越大,系统的动态响应性能越好。速度伺服带宽的最大值由 MRAT(运动运行轴调谐)指令生成。通过 MAAT 指令基于该最大值计算的增益,将产生与上述“阻尼系数”当前值相符的动态响应。或者,在执行 MAAT 指令前,可通过减小“速度伺服带宽”值来“削弱”系统的响应度。基于伺服系统和(有些情况下)所需系统阻尼系数 Z,速度伺服环所能达到的最大带宽在实践中存在限制。超出这些限制可能导致伺服运行不稳定。数据类型带宽限制AXIS_SERVO对于外部速度环伺服驱动器,最大速度伺服带宽 (Hz) = 0.159 * 2/调谐上升时间对于外部转矩环路伺服驱动器,最大速度伺服带宽 (Hz) = 0.159 * 0.25 * 1/Z2 * 1/驱动器模型时间常数AXIS_SERVO_DRIVE最大速度伺服带宽 (Hz) = 0.159 * 0.25 * 1/Z2 * 1/驱动器模型时间常数系数 0.159 表示将弧度/秒单位转换为赫兹所需的 1/2PI 因子。速度静态状态AXIS_SERVO_DRIVEBOOL标签当物理轴速度反馈的幅值小于所配置的速度静态窗口值时,该位置位。速度静态窗口AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。速度阈值AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。速度阈值状态AXIS_SERVO_DRIVEBOOL标签当物理轴速度反馈的幅值小于所配置的速度阈值时,此位置位。速度窗口AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。监视事件已装备状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签通过执行 MAW(运动装备监视)指令装备监视事件后置位。当发生监视事件或执行 MDW(运动解除监视)指令时清零。监视事件状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签发生监视事件时置位。执行另一 MAW(运动装备监视)指令或 MDW(运动解除监视)指令时清零。监视事件任务AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTMSG显示监视事件发生时触发的任务。0 表示监视事件将不触发任何事件任务。任务会在用于装备监视事件的指令将“处理完成”位置位的同时触发。该属性由控制器设置。不要通过外部设备进行设置。监视位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签监视位置,单位为位置单位“监视位置”是轴的当前设置点位置,以配置的轴位置单位表示,该值在上一次针对该轴执行 MAW(运动装备监视)指令期间设置。
转矩限制以驱动器可指示的电机额定电流最大百分比的形式指定正向转矩或负向转矩。例如,如果转矩限制为 150%,则送入电机的电流将限定在电机连续额定电流的 1.5 倍。负向转矩限制AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。正向转矩限制AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。转矩限制源AXIS_SERVO_DRIVEDINTGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。该参数显示轴任何转矩限制的当前来源(如果有)。0 = 无限制1 = 负向转矩限制2 = 正向转矩限制3 = 放大器峰值限制4 = 放大器 I(t) 限制5 = 母线调节器限制6 = 双极转矩限制7 = 电机峰值限制8 = 电机 I(t) 限制转矩限制状态AXIS_SERVO_DRIVEBOOL标签当给定轴转矩的幅值大于所配置的转矩限制时,此位置位。转矩偏移AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV标签转矩偏移在 -100% 到 +100% 之间转矩偏移补偿可用于对速度伺服环的输出进行动态给定转矩修正。由于该值在每个近似更新周期同步更新,可通过功能块编程将转矩偏移应用到自定义外控制环算法。转矩极性AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器极性”属性。请参见 IEC 1491 中的 IDN 85。转矩变换AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV%/(位置单位/秒^2)“转矩变换”属性用于将伺服环的加速度转换为电机额定转矩的等效百分比值。这相当于将伺服环增益参数的单位进行“归一化”,使得这些值不受反馈分辨率、驱动器变换、电机和负载惯量及机械传动比变化的影响。事实上,只要设置正确,“转矩变换”值可以代表系统惯量,与“调谐惯量”属性值之间相差一个转换常数系数。AXIS_SERVO — “转矩变换”值通常在控制器自动调谐过程中由 MAAT 指令确定。AXIS_SERVO_DRIVE — “转矩变换”值通常由驱动器自动调谐过程确定。必要时,可使用以下公式手动计算该值。转矩变换 = 100 % 额定转矩 / (加速度 @ 100% 额定转矩)例如,如果该轴以电机转数 (rev) 为位置单位,并且在电机应用 100% 额定转矩的情况下,电机以 3000 转/秒^2的速率加速,则转矩变换属性值的计算方式如下:转矩变换 = 100 % 额定值 / (3000 RPS2) = 0.0333 % 额定值/(转/秒^2)请注意,如果转矩变换值未能反映系统加速特征的真实转矩,则增益也不会反映系统的真实性能。转矩阈值AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。转矩阈值状态AXIS_SERVO_DRIVEBOOL标签当物理轴转矩反馈的幅值小于所配置的转矩阈值时,此位置位。变换状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签如果该位:ON - 轴是激活变换的一部分。OFF - 轴不是活动坐标变换的一部分。调谐加速度AXIS_SERVOAXIS_SERVO_DRIVEREALGSV位置单位/秒2“调谐加速度”和“调谐减速度”属性将返回上次运行调谐过程中所测得的加速度和减速度值。在外部转矩伺服驱动器配置中,这些值用于计算轴的调谐惯量值,通常后续的 MAAT(运动应用轴调谐)指令还会使用这些值来确定最大加速度和最大减速度属性的调谐值。调谐加速时间AXIS_SERVOAXIS_SERVO_DRIVEREALGSV秒“调谐加速时间”和“调谐减速时间”属性以秒为单位返回上次运行调谐过程中所测得的加速和减速时间。这些值用于计算调谐加速度和调谐减速度属性。调谐减速度AXIS_SERVOAXIS_SERVO_DRIVEREALGSV位置单位/秒2“调谐加速度”和“调谐减速度”属性将返回上次运行调谐过程中所测得的加速度和减速度值。在外部转矩伺服驱动器配置中,这些值用于计算轴的调谐惯量值,通常后续的 MAAT(运动应用轴调谐)指令还会使用这些值来确定最大加速度和最大减速度属性的调谐值。调谐减速时间AXIS_SERVOAXIS_SERVO_DRIVEREALGSV秒“调谐加速时间”和“调谐减速时间”属性以秒为单位返回上次运行调谐过程中所测得的加速和减速时间。这些值用于计算调谐加速度和调谐减速度属性。调谐惯量AXIS_SERVOAXIS_SERVO_DRIVEREALGSV%/(兆计数/秒2)“调谐惯量”值表示根据调谐过程中的测量值计算得到的轴总惯量。实际上,调谐惯量的单位不是行业标准的惯量单位,而是反馈输入的驱动器额定输出 %/(兆计数/秒2)。这种情况下,它代表转矩伺服驱动器的输入增益。对于伺服控制器而言,这些单位可以更为有效地描述系统惯性。MAAT(运动应用轴调谐)指令使用调谐惯量值来计算转矩变换值。如果调谐惯量值超过 100% 额定值/(兆计数/秒2),则可能会因速度估计量产生过多数字化噪声,从而影响数字伺服环的性能。这些噪声会由转矩增益而放大,而转矩增益与调谐惯例系数相关并且会传递给驱动器的转矩输出。因此,较高的调谐惯量值会激发机械共振,并且会因转矩波动较大而导致电机过热。解决这一问题的唯一方法是降低环路带宽,并有选择地应用一些输出滤波。由于调谐惯量值表示真实系统惯量的测量值,所以当驱动相对电机而言过高的惯量负载(即高惯量失配)时,会出现这种情况。但如果所用驱动器相对电机而言过小,或者系统的反馈分辨率过低,也会出现这种情况。通常,调谐惯量越低,数字伺服环的性能越接近模拟伺服系统的性能。可通过计算调谐惯量(% 额定值/MCPS)和速度伺服带宽(赫兹)的乘积,来直接量化噪声等级。调谐算法可根据该乘积采取措施,以限制高频噪声进入电机。对于调谐惯量与带宽的乘积为 1000 或更高的电机,可应用滤波带宽为速度伺服带宽 5 倍(赫兹)的低通滤波器。这样,低通滤波器引入的相位滞后量将限制在 12 度左右,相对于典型调谐伺服系统 30 到 60 度的相位裕度而言,这个数值较小。使用 200 Hz 的典型调谐低通滤波器带宽值时,1 KHz 范围内的高频量化噪声大约会衰减 5 倍。当调谐惯量与带宽的乘积达到 4000 或更高时,仅使用低通滤波器将不足以控制量化噪声等级。所以调谐算法开始按 4000/(调谐惯量 * 速度伺服带宽) 的比率来减小系统带宽。这样,量化噪声等级将保持在一个固定值,而与调谐惯性和带宽的乘积无关。例如,对于调谐惯性值为 213 且速度伺服带宽为 41 Hz(惯量与带宽的乘积为 8733)的电机,将以 46 的位置比例增益和 117 的速度比例增益进行调谐,并且低通滤波器带宽为 93。这是一个合理的无噪声增益集。调谐上升时间 (Tune Rise Time)AXIS_SERVOREALGSV秒“调谐上升时间”属性返回调谐过程中测得的轴上升时间。该值仅适用于与外部速度伺服驱动器连接的轴。在这种情况下,可使用“调谐上升时间”属性值计算调谐速度带宽。调谐速度变换AXIS_SERVOREALGSV%/(千计数/秒)“调谐速度变换”属性返回调谐过程中测得的轴驱动变换系数。该值仅适用于与外部速度伺服驱动器连接的轴。在这种情况下,后续 MAAT(运动应用轴调谐)指令可直接将“调谐速度变换”属性值应用到“速度变换”属性。调谐状态AXIS_SERVOAXIS_SERVO_DRIVEINTGSV0 = 调谐过程成功1 = 调谐进行中2 = 调谐过程由用户中止3 = 调谐过程超时4 = AXIS_SERVO - 调谐过程因伺服故障而失败4 = AXIS_SERVO_DRIVE - 调谐过程因驱动器故障而失败5 = 轴达到调谐行程限位6 = 轴极性设置错误用于 AXIS_SERVO_DRIVE 的更多代码:7 = 调谐测量故障8 = 调谐配置故障“调谐状态”属性返回上一次运行 MRAT(运动运行轴调谐)指令的状态,该指令可启动目标轴调谐过程。可使用该属性确定 MRAT 启动的操作何时成功完成。但有些情况下,控制器可能无法正常执行该操作。这种情况下,调谐过程会自动中止并报告一个调谐故障,该故障将存储在“调谐状态”输出参数中。调谐配置位AXIS_SERVOAXIS_SERVO_DRIVEDINTGSVSSV位0 = 反向调谐方向1 = 调谐位置误差积分器2 = 调谐速度误差积分器3 = 调谐速度前馈4 = 调谐加速度前馈5 = 调谐输出低通滤波器6 = 双向调谐7 = 调谐摩擦力补偿8 = 调谐转矩偏移反向调谐方向反向调谐方向位用于确定调谐过程的方向。如果该位置位(真),则以反向(或负向)方向开始运动。调谐位置误差积分器如果该位为:ON - 调谐过程计算位置积分增益。OFF - 调谐过程将位置积分增益置为 0。调谐速度误差积分器如果该位为:ON - 调谐过程计算速度积分增益。OFF - 调谐过程将速度积分增益置为 0。调谐速度前馈如果该位为:ON - 调谐过程计算速度前馈增益。OFF - 调谐过程将速度前馈增益设置为 0。调谐加速度前馈如果该位为:ON - 调谐过程计算加速度前馈增益。OFF - 调谐过程将加速度前馈增益设置为 0。调谐输出低通滤波器如果该位为:ON - 调谐过程计算输出滤波器带宽。OFF - 调谐过程将输出滤波器带宽设置为 0,即禁用滤波器。双向调谐“双向调谐”位用于确定调谐过程的方向是单向还是双向。如果该位置位(真),则首先以指定调谐方向启动调谐运动曲线,然后在相反方向上重复调谐运动曲线。双向调谐曲线返回的信息可用于摩擦力补偿和转矩偏移调谐。当配置为液压外部驱动类型时,双向调谐算法还会计算方向变换比。调谐摩擦力补偿该调谐配置仅在双向调谐模式下有效。如果该位为:ON - 调谐过程计算摩擦力补偿增益。OFF - 摩擦力补偿不受影响。调谐转矩偏移该调谐配置仅在双向调谐模式下有效。如果该位为:ON - 调谐过程计算转矩偏移。OFF - 转矩偏移不受影响。调谐速度AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV位置单位/秒“调谐速度”属性用于设置调谐过程的最大速度。在运行调谐过程前,应将该属性设置为所需的电机最大工作速度(工程单位)。调谐过程将根据加速或减速至调谐速度的斜坡测量最大加速度和减速度。因此,若调谐所用的速度并非系统所需的工作速度,所测得的加速度和减速度的精度会降低。调谐转矩AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV%“调谐转矩”属性用于确定调谐过程的最大转矩。在运行调谐过程前,应将该属性设置为所需的最大安全转矩水平。默认值是 100%,此时测得的系统加速度和减速度最为准确。在有些情况下,为限制调谐过程中对机械设备产生的压力,可能需要采用较小的调谐转矩限制值。在这种情况下,系统的加速度和减速度可根据调谐转矩与系统最大转矩输出之比进行推算。请注意,随着“调谐转矩”值减小,外推误差会增大。调谐行程限位AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV位置单位“调谐行程限位”属性用于限制调谐过程中轴的行程。如果轴在超过调谐行程限位之前无法完成调谐过程,则运动控制模块将停止调谐过程,并通过“调谐状态”属性报告已超出调谐行程限位。但这并不意味着已经超出调谐行程限位,而是指调谐程序完成时会超出行程限位。速度数据变换AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 44。速度数据变换扩展AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 46。速度数据变换系数AXIS_SERVO_DRIVEDINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 45。速度下调AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。速度误差AXIS_SERVOAXIS_SERVO_DRIVEREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。速度误差,单位为位置单位/秒速度误差是轴的给定速度与实际速度之差,以配置的轴“位置单位/秒”表示。对于已激活速度伺服环的轴,速度误差与其他误差项共同用来驱动电机,使其达到速度反馈与给定速度相等的状态。速度反馈AXIS_SERVO AXIS_SERVO_DRIVEREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。速度反馈,单位为位置单位/秒速度反馈是运动控制模块估算的轴实际速度,以配置的轴位置单位/秒表示。估算速度是在伺服更新间隔内对实际位置的变化应用 1 kHz 低通滤波器而计算出来的。速度反馈是有符号的值,符号(+ 或 -)取决于轴当前运动的方向。速度反馈增益AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV%伺服驱动器需要非零的命令输入,用以产生稳定的轴加速度或速度。要从伺服模块获得非零输出,需要有非零的位置或速度误差。这一在运动过程中的动态误差称为“跟踪误差”。我们应尽量避免非零跟踪误差。理想情况下,我们希望跟踪误差始终为零。这可以通过上述位置积分增益控制来实现,但积分器动作的响应时间通常会因过慢而无效。要获得更佳的动态响应,另一种方法是使用速度和加速度前馈。“速度前馈增益”属性用于提供生成给定速度所需的给定速度输出。将当前给定速度经速度前馈增益进行变换,然后以偏移形式加到由位置环控制元件产生的给定速度,即可实现此操作。完成此操作后,位置环控制元件不需对给定速度产生很大影响,从而显著减小位置误差值。因此,当以固定速度运行时,“速度前馈增益”使伺服系统的跟踪误差下降到接近于零。对于任何时候实际轴位置都不能明显滞后于给定位置的电子传动和同步应用等应用场合,这一点非常重要。理论上,最佳的“速度前馈增益”值为 100%。但实际上,可能需要在考虑速度环增益有限及其他应用考量事项的基础上对该值进行调整。当前馈增量可能加重轴的过冲情况时,可能会强制使用较小的速度前馈值。如有必要,可以运行一个简单的用户程序,使轴沿正方向点动,并监视点动期间轴的位置误差,以调整原为 100% 的速度前馈增益。应增大速度前馈增益,直至恒定速度下的位置误差尽可能小,但仍为正值。如果恒定速度下位置误差为负值,轴的实际位置将在给定位置前面。如果发生这种情况,应降低速度前馈增益,使位置误差再次为正值。请注意,必须输入合理的最大速度、加速度和减速度值,才能使轴点动。速度积分增益AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV1/ms-s在转矩(电流)环伺服驱动器模式下,每次进行伺服更新时,当前速度误差都会在称为“速度积分误差”的变量中进行累加。该值与速度积分增益相乘得到“伺服输出”或“给定转矩”的一个分量,用于尝试修正速度误差。但“速度 I 增益”修正的特点是,任何非零“速度误差”都会实时累加,以便产生足够的力来进行修正。“速度 I 增益”的这一特性使得其非常适用于具有严苛速度精度要求的应用。速度 I 增益值越大,轴驱动到零速度误差状态就越快。然而遗憾的是,“I 增益”控制本身并不稳定。“I 增益”过大将导致轴振动和伺服系统不稳定。某些情况下,“速度 I 增益”控制处于禁用状态。其中一种情况是,当进入轴驱动器的伺服输出饱和时。在这种情况下,连续的积分控制行为只会加重这种状况。另一种常见情况是当执行特定运动时。当“积分器挂起使能”属性置位时,伺服环将在设定的运动期间自动禁用积分器。由于积分增益在本质上具有不稳定性,建议将“位置积分增益”和“速度积分增益”视为互斥项。如果应用环境需要“积分增益”,则使用其中之一,而不要同时使用这两者。通常,当需要静态定位准确性时,最好选择速度积分增益。典型的速度积分增益值为约 15 ms-1-s-1。对于 AXIS_SERVO_DRIVE 数据类型:虽然“速度 I 增益”(如果使用)通常由自动伺服调谐过程确定,但用户也可手动设置“速度 I 增益”值。在这样做之前,必须为驱动系统确定轴的转矩变换系数。有关如何计算转矩变换系数的说明,请参见转矩变换属性的描述。完成此操作后,就可以使用以下公式根据“速度 P 增益”的当前值或计算值计算“速度 I 增益”:速度 I 增益 = 0.25 * 0.001 s/ms * (速度 P 增益)2假定“速度 P 增益”值为 0.25 s-1,得到的“速度 P 增益”值约为 15.6 ms-1-s-1-。速度反馈误差AXIS_SERVOAXIS_SERVO_DRIVEREALGSV标签重要事项:若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。速度积分器误差,单位为位置单位 – 毫秒/秒速度积分器误差是指定轴速度误差的运行总和,以指定轴位置单位/秒表示。对于已激活速度伺服环的轴,速度积分器误差与其他误差项共同用来驱动电机,使其达到速度反馈与给定速度相等的状态。双极速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。负向速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。正向速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。速度限制状态AXIS_SERVO_DRIVEBOOL标签当速度伺服环输入的给定速度幅值大于所配置的速度限制时,此位置位。速度锁定状态AXIS_SERVO_DRIVEBOOL标签当物理轴速度反馈的幅值处于所配置的当前给定速度的速度窗口范围内时,此位置位。速度偏移AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV标签速度偏移,以位置单位/秒表示速度偏移补偿可用于对位置伺服环的输出进行动态速度修正。由于该值在每个近似更新周期同步更新,可通过功能块编程将速度偏移应用到自定义外控制环算法。速度极性AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器极性”属性。请参见 IEC 1491 中的 IDN 42。速度比例增益AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV1/秒AXIS_SERVO在转矩(电流)环伺服驱动器模式下,伺服模块的数字速度环可在不需要模拟转速计的情况下提供阻尼。“速度误差”与“速度比例增益”相乘得到伺服输出或给定转矩的一个分量,并最终用于尝试修正速度误差,从而产生阻尼效果。因此,增大“速度比例增益”将产生更平滑的运动、增大加速度、减少超程并提高系统稳定性。速度环还支持使用更高的有效位置环增益值,但速度比例增益过大会产生高频不稳定和共振效果。请注意,速度比例增益的单位与位置比例增益的单位相同,因此便于执行标准的英寸/分钟/密尔计算来确定静态刚度或阻尼。最大带宽基于伺服驱动器转矩环的动力学状况和所需系统阻尼系数 Z,速度环所能达到的最大带宽存在限制。这些限制可表示如下:带宽(速度)= 0.25 * 1/Z2* 带宽(转矩)例如,如果驱动器转矩环的带宽为 100 Hz,阻尼系数 Z 为 0.8,则速度带宽约为 40 Hz。根据这个数字,可以计算出环的相应增益。请注意,转矩环的带宽包括反馈采样延时和滤波时间常数。伺服模块配置为速度环伺服驱动器时,不使用运动控制器中的速度环。因此在这种情况下不需要确定速度比例增益。典型的速度比例增益值约为 250 秒-1。AXIS_SERVO_DRIVE标准 RA SERCOS 驱动器的数字速度环可在无需模拟转速计的情况下提供阻尼。“速度误差”与“速度比例增益”相乘得到给定转矩,并最终用于尝试修正速度误差,从而产生阻尼效果。因此,增大“速度比例增益”将产生更平滑的运动、增大加速度、减少超程并提高系统稳定性。速度环还支持使用更高的有效位置环增益值,但速度比例增益过大会产生高频不稳定和共振效果。请注意,速度比例增益的单位与位置比例增益的单位相同,因此便于执行标准的计算来确定阻尼和带宽。如果已知所需速度伺服的统一增益带宽(赫兹),可使用如下公式计算相应的 P 增益。速度 P 增益 = 带宽(赫兹)/6.28现代的速度伺服系统通常以约 40 赫兹的统一增益带宽运行。典型的速度比例增益值约为 250 秒-1。最大带宽基于系统内部转矩环的动力学状况和所需系统阻尼系数 Z,速度环所能达到的最大带宽存在限制。这些限制可表示如下:带宽(速度)= 0.25 * 1/Z2* 带宽(转矩)例如,如果驱动器转矩环的带宽为 100 Hz,阻尼系数 Z 为 0.8,则速度带宽约为 40 Hz。根据这个数字,可以计算出环的相应增益。请注意,转矩环的带宽包括反馈采样延时和滤波时间常数。速度变换AXIS_SERVOREALGSVSSV%/(位置单位/秒)“速度变换”属性用于将伺服环输出转换为提供给外部速度伺服驱动器的等效电压。这相当于将伺服环增益参数的单位进行“归一化”,使得这些值不受反馈分辨率、驱动器变换或机械传动比变化的影响。“速度变换”值通常由伺服驱动器的自动调谐过程确定,但在必要时也可使用以下公式计算这些值。如果轴使用速度伺服驱动器,则伺服模块中的软件速度环处于禁用状态。在这种情况下,可以使用以下公式来计算速度变换值:速度变换 = 100%/(速度 @ 100 %)例如,如果该轴使用电机转数作为位置单位(转),并且伺服驱动器的变换系数为,输入为 100%(例如 10 伏)时电机速度为 5,000 RPM(即 83.3 RPS),则转矩变换属性值的计算方式如下。速度变换 = 100%/(83.3 RPS) = 1.2 %/(转/秒)速度伺服带宽AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV赫兹“速度伺服带宽”值代表统一增益带宽,可用于计算后续 MAAT(运动应用轴调谐)指令的增益。统一增益带宽是一种频率,超过该频率后速度伺服不能提供任何有意义的位置干扰校正。通常,在确保伺服系统稳定的情况下,速度伺服带宽越大,系统的动态响应性能越好。速度伺服带宽的最大值由 MRAT(运动运行轴调谐)指令生成。通过 MAAT 指令基于该最大值计算的增益,将产生与上述“阻尼系数”当前值相符的动态响应。或者,在执行 MAAT 指令前,可通过减小“速度伺服带宽”值来“削弱”系统的响应度。基于伺服系统和(有些情况下)所需系统阻尼系数 Z,速度伺服环所能达到的最大带宽在实践中存在限制。超出这些限制可能导致伺服运行不稳定。数据类型带宽限制AXIS_SERVO对于外部速度环伺服驱动器,最大速度伺服带宽 (Hz) = 0.159 * 2/调谐上升时间对于外部转矩环路伺服驱动器,最大速度伺服带宽 (Hz) = 0.159 * 0.25 * 1/Z2 * 1/驱动器模型时间常数AXIS_SERVO_DRIVE最大速度伺服带宽 (Hz) = 0.159 * 0.25 * 1/Z2 * 1/驱动器模型时间常数系数 0.159 表示将弧度/秒单位转换为赫兹所需的 1/2PI 因子。速度静态状态AXIS_SERVO_DRIVEBOOL标签当物理轴速度反馈的幅值小于所配置的速度静态窗口值时,该位置位。速度静态窗口AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。速度阈值AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。速度阈值状态AXIS_SERVO_DRIVEBOOL标签当物理轴速度反馈的幅值小于所配置的速度阈值时,此位置位。速度窗口AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。监视事件已装备状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签通过执行 MAW(运动装备监视)指令装备监视事件后置位。当发生监视事件或执行 MDW(运动解除监视)指令时清零。监视事件状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签发生监视事件时置位。执行另一 MAW(运动装备监视)指令或 MDW(运动解除监视)指令时清零。监视事件任务AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTMSG显示监视事件发生时触发的任务。0 表示监视事件将不触发任何事件任务。任务会在用于装备监视事件的指令将“处理完成”位置位的同时触发。该属性由控制器设置。不要通过外部设备进行设置。监视位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签监视位置,单位为位置单位“监视位置”是轴的当前设置点位置,以配置的轴位置单位表示,该值在上一次针对该轴执行 MAW(运动装备监视)指令期间设置。
提供反馈