轴属性 (A-D)
下表列出轴的相关配置、状态和故障信息。控制器将轴的相关信息存储为轴的属性。
下表将描述各属性的访问方法。“访问”列将列出属性的访问方法。“说明”列将具体加以说明。
示例
属性 | 轴类型 | 数据类型 | 访问 | 说明 |
加速度前馈增益 | GSV | 使用“获取系统值”(GSV) 指令获取属性值。 | ||
SSV | 使用“设置系统值”(SSV) 指令获取属性值。 | |||
加速状态 | 标签 | 针对轴使用标签来获取属性值。 | ||
实际加速度 | GSV 标签 | 使用轴的标签或 GSV 指令获取属性值。使用标签方式更为方便。 |
轴属性 (A-D)
下表介绍轴的各个属性。请注意,轴属性分为三组。下表描述属性 A-D。
要查看其他属性,请选择以下主题之一。
- 属性轴类型数据类型访问说明绝对反馈启用AXIS_SERVOSINTGSVSSV重要提示: 此属性仅用于以下模块的轴:1756-HYD02 或 1756-M02AS 模块。该属性用于控制伺服模块是否使用反馈设备的绝对位置功能。如果“绝对反馈使能”设置为真,伺服模块将绝对反馈偏移与反馈设备当前位置相加,来确定机器绝对参考位置。由于绝对反馈设备即使在循环上电过程中也会保留位置参考值,因此机器参考系统可在加电时恢复。要确定合适的绝对反馈偏移属性值,可以将归零模式模式配置为“绝对”(“绝对反馈使能”设置为真时唯一有效的选项)并执行 MAH 指令。执行该指令时,伺服模块根据配置的零点位置与轴当前绝对反馈位置之差计算绝对反馈偏移。在 MAH 指令执行完毕后,计算出的“绝对反馈偏移”将立即应用于轴。由于在 MAH 指令执行期间将重新引用轴的实际位置,因此伺服环一定不能处于活动状态。如果伺服环处于活动状态,则 MAH 指令会出错。如果“绝对反馈使能”设置为“假”,伺服模块将忽略“绝对反馈偏移”并将反馈设备视为增量式位置传感器。在这种情况下,需要执行归零或重新定义位置操作,来确定绝对机器参考位置。在这种情况下,绝对归零模式视为无效。当“传感器类型”设置为 SSI 时,该属性可配置。对于 LDT 传感器,强制将“绝对反馈使能”设置为真。对于 AQB 传感器,强制将“绝对反馈使能”设置为假。绝对反馈偏移AXIS_SERVOREALGSVSSV位置单位重要提示: 该属性仅用于 1756-HYD02 或 1756-M02AS 模块的轴。“绝对反馈使能”属性应设置为真。该属性用于确定反馈设备绝对位置与机器绝对位置之间的相对距离。上电时,该属性将发送到伺服模块,并与反馈设备当前位置相加,来恢复机器绝对参考位置。如果将轴配置为线性模式,只要反馈设备未超出其范围限制,就可以在循环上电后恢复绝对位置。如果反馈设备回滚到其计数范围,则轴的绝对位置将不再有效。如果将轴配置为旋转模式,伺服模块将负责根据配置的归位值和绝对反馈设备的回滚动态调整绝对反馈偏移。如有必要,可以通过定期更新控制器的绝对反馈偏移值,在循环上电后恢复绝对位置。为此,可在一个“轴信息选择”属性中选择“绝对反馈偏移”枚举值。绝对参考状态AXIS_SERVO_DRIVEBOOL标签如果该位为:则:ON发生绝对归零过程。该位将保持置位,直至发生以下情况之一:驱动器将其配置参数重置为默认值。轴执行主动或被动归零或重新定义位置。OFF轴的位置尚未或不再参考由绝对归零过程建立的机器绝对参考系统。加速度限制状态AXIS_SERVO 驱动器BOOL标签当速度伺服环输入的给定加速度幅值大于所配置的加速度限制时,此位置位。加速状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签轴当前在指令的作用下加速时置位。“加速状态”位和“减速状态”位用于查看轴正否正在加速或减速。如果这两个位均处于清零状态,说明轴正以稳定速度运动或保持静止。给定加速度AXIS_SERVOAXIS_SERVO_DRIVEREALGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。给定加速度,单位为位置单位/秒^2“给定加速度”是指定轴相对输出求和点的当前参考加速度(以配置的轴位置单位/秒2表示)。因此,“给定加速度”值代表内部速度控制环的输出。不要将“给定加速度”与“给定速度”相混淆,给定速度代表位置伺服环给定位置输入的变化率。加速度数据变换AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 160。加速度数据变换扩展AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 162。加速度数据变换系数AXIS_SERVO_DRIVEINTGSV该属性来自“驱动器单位”属性。请参见 IEC 1491 中的 IDN 161。加速度反馈AXIS_SERVOAXIS_SERVO_DRIVEREALGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。加速度反馈,单位为位置单位/秒^2加速度反馈是伺服模块估算的轴实际速度,以配置的轴位置单位/秒2表示。估算加速度等于伺服更新间隔内估算速度之差。加速度反馈是有符号的值,符号(+ 或 -)取决于轴当前运动的方向。加速度前馈增益AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV%AXIS_SERVO如果连接到转矩伺服驱动器,可通过“加速度前馈增益”提供必要的给定转矩输出,以产生给定的加速度。将当前给定加速度经加速度前馈增益进行变换,然后以偏移形式加到由伺服环产生的伺服输出中,即可实现此操作。完成此操作后,伺服环不需对伺服输出产生很大影响,从而显著减小位置和/或速度误差值。因此,当与“速度前馈增益”配合使用时,“加速度前馈增益”可使伺服系统的跟踪误差在运动的加速和减速阶段降至接近于零。对于任何时候实际轴位置都不能明显滞后于给定位置的电子传动和同步应用等应用场合,这一点非常重要。如果连接到速度伺服驱动器,通过加速度前馈可以向给定速度增加一个与给定加速度成正比的项。这适用于外部驱动器在加速和减速过程中表现出稳定速度误差的情况。加速度前馈的最佳值取决于驱动器配置。加速度前馈值过大往往会导致轴超程。对于转矩伺服驱动器应用,加速度前馈的最佳值理论上为 100%。但实际上,可能需要在考虑伺服环增益有限及其他应用考量事项的基础上对该值稍做调整。对于速度伺服驱动器应用,加速度前馈的最佳值主要取决于驱动器的速度变换和伺服环配置。在这种情况下,100% 的值仅表示将给定加速度值 100% 应用于给定速度求和点,该值可能与最佳值相去甚远。要找到最佳的加速度前馈增益,可运行一个简单的项目,使轴沿正方向点动,并在点动期间监视轴的位置误差。通常情况下,加速度前馈与速度前馈配合使用,可在整个运动曲线上实现接近零的跟随误差。要调整加速度前馈增益,必须首先使用上述过程优化速度前馈增益。在点动曲线的加速阶段捕捉峰值位置误差的同时,增大加速度前馈增益,直至峰值位置误差尽可能小,但仍为正值。如果加速斜坡期间的峰值位置误差为负值,则在此期间轴的实际位置超前于给定位置。如果出现这种情况,应降低加速度前馈增益,使位置误差再次为正值。在减速斜坡期间,也应执行相同操作,以确认减速期间的峰值位置误差是否可接受。请注意,必须输入合理的最大速度、加速度和减速度值,才能使轴点动。“加速度前馈增益”属性用于提供生成给定加速度所需的给定转矩输出。将当前给定加速度经加速度前馈增益进行变换,然后以偏移形式加到由伺服环产生的伺服输出中,即可实现此操作。完成此操作后,伺服环无需生成较大的控制作用,因此将显著减小位置和/或速度误差值。当与“速度前馈增益”配合使用时,“加速度前馈增益”可使伺服系统的跟随误差在运动的加速和减速阶段降至接近于零。对于任何时候实际轴位置都不能明显滞后于给定位置的电子传动和同步应用等应用场合,这一点非常重要。理论上,最佳的“加速度前馈”值是 100%。但实际上,可能需要在考虑转矩环增益有限及其他应用考量事项的基础上对该值进行调整。当前馈增量可能加重轴的过冲情况时,可能会强制使用较小的加速度前馈值。如有必要,可以运行一个简单的用户程序,使轴沿正方向点动,并监视点动期间轴的位置误差,以调整原为 100% 的加速度前馈增益。通常情况下,加速度前馈与速度前馈配合使用,可在整个运动曲线上实现接近零的跟随误差。要调整加速度前馈增益,必须首先使用上述过程优化速度前馈增益。在点动曲线的加速阶段捕捉峰值位置误差的同时,增大加速度前馈增益,直至峰值位置误差尽可能小,但仍为正值。如果加速斜坡期间的峰值位置误差为负值,则在此期间轴的实际位置超前于给定位置。如果出现这种情况,应降低加速度前馈增益,使位置误差再次为正值。在减速斜坡期间,也应执行相同操作,以确认减速期间的峰值位置误差是否可接受。请注意,必须输入合理的最大速度、加速度和减速度值,才能使轴点动。双极加速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒2该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。负向加速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒2该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。正向加速度限制AXIS_SERVO_DRIVEREALGSVSSV位置单位/秒2该属性直接映射到 SERCOS IDN。有关说明,请参阅 SERCOS 接口标准。该属性自动设置。通常不需要更改。实际加速度AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。实际加速度,单位为位置单位/秒^2“实际加速度”表示当前即时测量的轴加速度,以配置的轴位置单位/秒^2 表示。该值按每个近似更新间隔内实际速度的当前增量进行计算。实际加速度是有符号值 — 符号(+ 或 -)取决于轴当前的加速方向。实际加速度是有符号的浮点值。其分辨率不取决于平均速度时基,而取决于轴的转换常数,并且系统内部将实际速度分辨率限定为不超出 1 个反馈计数/近似更新周期^2。实际位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。实际位置,单位为位置单位“实际位置”指轴的当前绝对位置,以该轴配置的位置单位表示,从反馈传感器中读取。但请注意,此值基于在正在执行的同步数据传输过程中报告给 Logix 处理器的数据,这会导致延迟一个近似更新周期。因此,获得的实际位置值是一个近似更新周期之前的轴的实际位置。实际速度AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。实际速度,单位为位置单位/秒“实际速度”指当前即时测量的轴速度,以配置的轴位置单位/秒表示。该值按每个近似更新间隔内实际位置的当前增量进行计算。实际速度是有符号值 - 符号(+ 或 -)取决于轴当前的运动方向。实际速度是有符号浮点值。其分辨率不取决于平均速度时基,而取决于轴的转换常数,并且系统内部将实际速度的分辨率限定为 1 个反馈计数/近似更新周期。模拟输入 1AXIS_SERVOREALGSVSSV该属性仅适用于与轴相关的模拟输入 2(Kinetix7000 驱动器)。该属性表示连接到 Kinetix7000 驱动器模拟输入的模拟设备的模拟值,其值范围为 +/-16384 的整数。这些输入可用于带有测力传感器(测量卷轴的卷绕力)或松紧调节器(直接测量卷绕力/位置)的卷纸/印染应用,这些设备可直接连接到用于控制卷绕机的驱动器。属性错误代码AXIS_SERVOAXIS_SERVO_DRIVEINTGSV*标签由出错的设置属性列表服务返回至模块的 CIP 错误代码。当发生轴配置故障时,与运动控制模块或驱动器相关联的一个或多个轴参数尚未成功更新,与本地控制器中相应参数的值不匹配。轴的配置与本地控制器的配置不再匹配属于严重故障,将导致故障轴关闭。重新配置运动控制模块后,属性错误代码将重置为零。轴配置故障信息通过控制器收到的“设置属性列表”服务响应中包含的 16 位 CIP 状态字,从运动控制模块或设备传递到控制器。运动控制模块的“设置属性列表”服务可以由控制器的软件“设置属性列表”服务启动,也可以通过控制器程序内引用伺服属性的 SSV 指令启动。处理运动控制服务响应的各种例程负责更新这些属性。“设置”和“获取”服务响应为已处理的每个属性提供状态响应。状态值由 CIP 按如下定义:保留 UINT16,值 0-255 (0x00-0xFF),以反映通用服务状态代码。值 256 – 65535 可用于对象/类属性特定错误。属性错误 IDAXIS_SERVOAXIS_SERVO_DRIVEINTGSV*标签与非零“属性错误代码”相关的属性 ID。属性错误 ID 用于保留返回导致轴配置故障的非零属性错误代码的伺服属性 ID。属性错误 ID 默认为零,并且在发生故障后,可通过重新配置运动控制模块将其重置为零。若要在Logix Designer应用程序中快速查看属性错误,可执行以下操作。
- 在控制器项目管理器中选择相应的轴。
- 查看控制器项目管理器底部的属性错误。
辅助反馈配置AXIS_SERVO_DRIVEINTGSV控制器和驱动器使用该属性对反馈设备计数进行变换。这些属性来自相应的电机和辅助反馈单位属性。位0 = 反馈类型0 — 旋转(默认值)1 - 线性1 =(保留)2 = 线性反馈单位0 - 公制1 - 英制3 = 反馈极性(仅限辅助反馈设备)0 — 不取反1 — 取反如果这些位的值为:反馈分辨率变换为:00反馈周期数/反馈单位转10反馈周期数/反馈单位转01反馈周期数/mm11反馈周期数/英寸反馈极性“反馈极性”位属性可用来改变反馈设备方向的含义。该位仅对辅助反馈设备有效。使用 MRHD 指令和 MAHD 指令对辅助反馈设备执行电机/反馈连接诊断时,应配置辅助反馈设备的“反馈极性”位,以确保负反馈进入伺服环。由于“反馈极性”位被强制为 0(不取反),因此电机反馈设备必须针对负反馈正确连线。辅助反馈故障AXIS_SERVOAXIS_SERVO_DRIVEBOOL标签若出现以下任一情况,将辅助反馈源的此属性置位:一个或多个反馈通道的差分电信号(例如 A+ 与 A-、B+ 与 B- 或者 Z+ 与 Z-)处于同一电平(同为高电平或同为低电平)。正常情况下,差分信号应始终保持相反电平。出现这种情况时,最常见的原因是反馈传感器与伺服模块或驱动器之间的线路断开;伺服模块或驱动器与反馈设备之间的反馈“电源”或反馈“公共”电连接断开。控制器将该故障闭锁。该故障可通过“运动轴故障复位”(MAFR) 或“运动轴关闭复位”(MASR) 指令清除。辅助反馈插补因子AXIS_SERVO_DRIVEDINTGSV每个周期的反馈计数“反馈插补”属性用于确定单个反馈周期内的反馈计数数目。“反馈插补因子”取决于反馈设备和驱动器反馈电路。正交编码器反馈设备和相关的驱动器反馈接口通常支持 4 倍插补,因此将这些设备的插补因子设为 4 个反馈计数/周期(周期有时也称为行)。对于高分辨率正弦/余弦反馈设备类型,插补因子可高达 2048 个计数/周期。“反馈分辨率”与相应“反馈插补因子”的乘积为反馈通道的整体分辨率,以反馈计数/反馈单位表示。在给出的示例中,正交编码器的分辨率为 2000 行/转、插补因子为 4 倍,整体分辨率为 8000 个计数/转。辅助反馈噪声故障AXIS_SERVO_DRIVEBOOL标签当反馈设备的信号线路出现噪声时,该属性置位。例如,当反馈 A 和 B 通道(A 与 B 正交)同时跳变时,通常称为反馈噪声。最可能造成反馈噪声(如下所示)的原因是,反馈设备本身失去正交性或者辐射性共模噪声信号被反馈设备线路所获取。这两种情况都可以在示波器上观察到。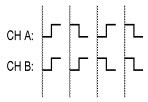 要排查通道失去正交性的问题,请查找以下情况。
要排查通道失去正交性的问题,请查找以下情况。- 反馈传感器组件物理性失配
- 编码器信号过电容(或其他延迟)
正确接地和屏蔽通常可以解决辐射噪声问题。控制器将该故障闭锁。该故障可通过“运动轴故障复位”(MAFR) 或“运动轴关闭复位”(MASR) 指令清除。辅助反馈比AXIS_SERVO_DRIVEFLOATGSV每个电机反馈单位的辅助反馈单位数“辅助反馈比”属性表示辅助反馈设备与电机之间的定量关系。对于旋转式辅助反馈设备,此属性值应为辅助反馈设备与电机轴圈数之比。对于线性辅助反馈设备,该属性值通常表示电机轴与线性致动器之间的进给常数。“辅助反馈比”属性用于在配置过程中根据所选电机的规范计算范围限值和默认值。执行双反馈伺服环配置时,驱动器也将使用此值。辅助反馈分辨率AXIS_SERVO_DRIVEDINTGSV每个辅助反馈单位的周期数“电机反馈分辨率”和“辅助反馈分辨率”属性用于向 A-B 驱动器提供相关反馈设备的分辨率(每个反馈单位的周期数)。这些参数为 SERCOS 驱动器提供了关键的信息,可计算用于将驱动器计数转换为反馈计数的变换系数。辅助反馈类型AXIS_SERVO_DRIVEINTGSVFeedback TypeCode仅旋转仅线性旋转或线性<无>0x0000---SRS0x0001XSRM0x0002XSCS0x0003XSCM0x0004XSNS0x0005XMGH0x0006X旋转变压器0x0007X模拟参考0x0008X正弦/余弦0x0009XTTL0x000AXUVW0x000BX未知段0x000CXEndat0x000DXRCM21S-40x000EXRCM21S-60x000FXRCM21S-80x0010XLINCODER0x0011X正弦/余弦(带霍尔元件)0x0012X辅助反馈单位AXIS_SERVO_DRIVEINTGSV“电机反馈单位”属性用于指定“电机反馈分辨率”属性值的计量单位。“辅助反馈单位”属性用于指定“辅助反馈分辨率”属性值的计量单位。枚举表中的单位用于线性/旋转、英制/公制反馈设备。0 = 转1 - 英寸2 = mm辅助位置反馈AXIS_SERVOAXIS_SERVO_DRIVEREALGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。辅助位置反馈,单位为位置单位“辅助位置反馈”是指来源于辅助反馈输入的位置反馈的当前值。平均速度AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。平均速度,单位为位置单位/秒“平均速度”表示轴的当前速度,以该轴配置的位置单位/秒表示。与“实际速度”属性值不同,该值通过基于为轴配置的“平均速度时基”求轴的实际速度平均值计算而得。平均速度是有符号值。符号不一定显示轴当前的运动方向,而显示平均运动的方向。轴当前可能沿相反方向运动。“平均速度”变量的分辨率取决于“平均速度时基”参数的当前值以及为轴配置的“转换常数”(反馈计数/位置单位)。平均速度时基值越大,速度分辨率越高,但对速度变化的响应速度越慢。平均速度时基最小值为运动组的近似更新周期。可使用以下方程计算平均速度分辨率(以位置单位/秒表示)。 例如,对于位置单位为英寸且转换常数 (K) 为 20000 的轴,平均速度时基为 0.25 秒时可得如下平均速度分辨率。
例如,对于位置单位为英寸且转换常数 (K) 为 20000 的轴,平均速度时基为 0.25 秒时可得如下平均速度分辨率。 平均速度时基AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSVSSV秒“平均速度时基”属性用于指定计算轴的平均速度所需的时间(以秒为单位)。当请求平均速度值时,首先获取由“平均速度时基”给出的时间内轴行进的总距离,然后将该值除以时基即可。平均速度时基的值应足够大,大到足以滤除可能引发“噪声”速度值的小幅速度变化,但又必须足够小,小到足以跟踪轴速度的大幅变化。通常,介于 0.25 与 0.5 秒之间的值能够适用于大多数应用。轴地址AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALGSV用于调试。轴配置状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTGSV轴配置状态机的状态“轴配置状态”属性用于调试,以指示该轴当前在轴配置状态机中所处的状态。即使是消费型和虚拟轴也可利用此属性。如果属性如下:128 — 轴已配置并已准备就绪,可以使用。非 128 — 轴未配置。轴控制位AXIS_SERVOAXIS_SERVO_DRIVEDINTGSV位0 = 中止过程请求1 = 关闭请求2 = 零 DAC 请求3 = 中止归零请求4 = 中止事件请求5-14 = 保留15 = 更改给定参考中止过程如果该位置位,则轴上的所有激活调试或测试过程都将中止。关闭请求如果该位置位,轴将强制进入关闭状态。对于 AXIS_SERVO 数据类型,正常触点断开,DAC 输出跳变为 0。零 DAC 请求 — 仅适用于 AXIS_SERVO 数据类型如果该位置位,伺服模块将使该轴的 DAC 输出强制设为零伏。只有当轴处于Direct Drive状态且驱动器已启用但无伺服操作时,该位才会产生影响。中止归零请求如果该位置位,所有激活的归零过程都将取消。中止事件请求如果该位置位,所有激活的记录或监视事件过程都将取消。更改给定参考如果该位置位,控制器会切换到给定位置的新位置坐标系统。当伺服模块或驱动器处理来自控制器的新给定位置数据,以确定是否考虑因参考点变换而引入的偏移量时,会使用该位。当轴通过将“更改给定参考”位清零来确认参考位置的更改已完成时,该位清零。轴数据类型AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTMSG相关的运动轴标签数据类型:0 = 反馈1 = 消费型2 = 虚拟3 = 通用4 = 伺服5 = 伺服驱动器6 = 通用驱动器“轴数据类型”属性用于确定创建并适用于该轴实例的数据模板、内存格式和属性集。该属性只能在轴创建服务期间设置。反馈与仅反馈模块(如 PLS II 和 CFE)相关的仅反馈轴,支持正交编码器、旋转变压器和 HiperFace 等。消费型使用由另一个控制器上的运动轴生成的轴运动数据的消费型轴。虚拟具有运动轨迹规划器全部功能,但与任何物理设备无关的虚拟轴。通用具有运动轨迹规划器全部功能,但不支持集成配置的轴。通用轴与 1756-DM 等设备相关联。伺服具有运动轨迹规划器全部功能,并支持集成配置的轴。伺服轴与闭合伺服环并向外部驱动器发送模拟给定值的模块(即 1756-M02AE、1756-HYD02 和 1756-M02AS 模块)相关联。伺服驱动器具有运动轨迹规划器全部功能,并支持集成配置的轴。伺服驱动器轴与向外部驱动器发送数字给定值的数字驱动器接口模块(即 1756-M03SE、1756-M08SE 和 17556-M16SE(SERCOS 接口))相关联。通用驱动器符合扩展封装外形并处于 1756-M08SEG 模块环网中的 SERCOS 接口驱动器的轴。轴事件AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINT标签用于以一个 32 位字访问所有事件状态位。该标签与轴事件位属性相同。事件状态位监视事件已装备状态0监视事件状态1记录事件 1 已装备状态2记录事件 1 状态3记录事件 2 已装备状态4记录事件 2 状态5归零事件已装备状态6归零事件状态7轴事件位AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTGSV用于以一个 32 位字访问所有事件状态位。该属性与轴事件标签相同。事件状态位监视事件已装备状态0监视事件状态1记录事件 1 已装备状态2记录事件 1 状态3记录事件 2 已装备状态4记录事件 2 状态5归零事件已装备状态6归零事件状态7轴故障AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINT标签轴故障如下:故障类型位物理轴故障0模块故障1配置故障2该属性与轴故障位属性相同。轴故障位AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTGSV*轴故障如下:故障类型位物理轴故障0模块故障1配置故障2组故障3该属性与轴故障标签相同。轴信息选项 1轴信息选项 2AXIS_SERVOAXIS_SERVO_DRIVEDINTGSVGSV轴具有一组默认情况下不会更新的属性。若要使用其中一种属性,必须选择该属性作为轴的实时轴信息。否则,当轴运行时,该属性的值不会发生变化,并且不会显示正确的值。最多可选择其中的 2 个属性。若要使用 GSV 指令选择其中一种属性作为“实时轴信息”,可将“轴信息选项 1”或“轴信息选项 2”属性设置如下。AXIS_SERVOAXIS_SERVO_DRIVE值无(默认)无(默认)1给定位置给定位置2位置反馈位置反馈3辅助位置反馈辅助位置反馈4位置误差位置误差5位置积分误差位置积分误差6给定速度给定速度7速度误差速度误差8速度积分误差速度积分误差9给定加速度给定加速度10加速度反馈加速度反馈11伺服输出水平12标记距离标记距离13给定转矩14转矩反馈15正向动态转矩限制16负向动态转矩限制17电机容量18驱动器容量19电源容量20母线调节器容量21电机电角度22转矩限制源23直流母线电压24绝对偏移25轴实例AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALINTGSV分配给轴的实例编号“轴实例”属性用于返回轴的实例编号。针对轴严重故障生成的严重故障记录只包含不合要求的轴的实例。用户通常会使用该属性确定轴是否不合要求(即,实例编号是否匹配)。轴响应位AXIS_SERVOAXIS_SERVO_DRIVEDINTGSV位0 = 中止过程应答1 = 关闭应答2 = 零 DAC 应答3 = 中止归零应答4 = 中止事件应答5-14 = 保留15 = 更改参考位置中止过程应答如果该位置位,说明调谐或测试过程已中止。关闭应答如果该位置位,说明已使轴强制进入关闭状态。零 DAC 应答 — 仅适用于 AXIS_SERVO 数据类型如果该位置位,说明该轴的 DAC 输出已设置为零伏。中止归零应答如果该位置位,说明激活状态的归零过程已中止。中止事件应答如果该位置位,说明激活状态的记录或监视位置事件过程已中止。更改参考位置如果该位置位,说明伺服环已切换为新的位置坐标系统。当控制器处理来自伺服模块或驱动器的新位置数据,以确定是否考虑因参考点变换而引入的偏移量时,会使用该位。当控制器通过将“更改给定参考”位清零来确认参考位置的更改已完成时,该位清零。轴工作状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTGSV轴的工作状态。0 = 轴就绪1 =Direct Drive控制2 = 伺服控制3 = 轴故障4 = 轴关闭5 = 轴禁止6 = 轴未分组7 = 无模块8 = 正在配置轴内部状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINT标签用于以一个 32 位字访问所有轴状态位。该标签与轴状态位属性相同。轴内部状态位伺服动作状态0驱动器使能状态1关闭状态2正在更新配置3禁止状态4轴状态位AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTGSV*用于以一个 32 位字访问所有轴状态位。该属性与“轴状态”标签相同。轴内部状态位伺服动作状态0驱动器使能状态1关闭状态2正在更新配置3禁止状态4轴类型AXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEINTGSVSSV“轴类型”属性用于确定轴的预期用途。若:将该属性设置为:该轴未在应用中使用(当系统中轴的个数为奇数时,通常会出现这种情况)0只需要从反馈接口获得位置信息1该轴将用于完整的伺服运行2轴类型不仅用于限定与轴伺服环相关的许多操作,还可以控制伺服模块轴状态指示灯的行为。轴类型为“1”(仅反馈)时,DRIVE 指示灯熄灭,为“0”(未使用)时,FDBK 和 DRIVE 指示灯均熄灭。Logix Designer应用程序还使用当前配置的轴类型值来控制许多与配置轴相关的对话框外观。回差反向偏移AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV“回差反向偏移”用于补偿由机械回差引入的位置误差。例如,动力传动型的应用对于机械操作期间的准确性和可重复性有较高要求。轴运动通常在许多机械零件(如电机、变速箱和滚珠丝杠)共同作用下产生,这就可能影响准确性,并造成零件的磨损。因此,当轴在指令作用下沿反方向运动时,机器中的机械间隙(通过传动和滚珠丝杠等产生)可能会产生电机小幅运动而轴不运动的情况。这样造成的结果是,尽管轴实质上并未发生运动,而反馈设备却可能指示轴已经运动。若要补偿机械回差,可在运动轨迹规划器的给定位置基础上加上由“回差反向偏移”属性指定的有方向偏移,然后再将结果应用到伺服环。每当给定速度的符号发生更改(反向)时,Logix 控制器都会在当前给定位置的基础上加上或减去回差距离值。这将导致伺服系统立即将电机移至回差窗口的另一端并啮合负载。务必注意,这种有方向偏移的应用对用户完全透明;此偏移不会对“给定位置”属性的值产生任何影响。如果将零值应用于“回差反向偏移”,则实际上是禁用了此功能。一旦通过非零值启用此功能,并且通过将给定运动反向使负载啮合后,更改“回差反向偏移”会导致向给定位置应用偏移校正时轴发生运动。回差稳定窗口AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV“回差稳定窗口”参数用于控制伺服控制环的回差稳定功能。下面将详细介绍该功能及常见的回差不稳定现象。在使用机械变速箱的应用中,机械回差是一个常见问题。产生这种问题的深层原因在于,当输入齿轮转至其近端轮齿与输出齿轮的相邻轮齿接触前,电机感受不到输出的反射惯量。也就是说,当轮齿未啮合时,系统惯量降至电机惯量。如果对伺服环进行调谐使其达到在负载情况下的最佳性能条件,则在轮齿未啮合时,最好的状况是,轴处于欠阻尼状态,而最坏的状况是,轴处于不稳定状态。在最坏状况下,电机轴与输入齿轮将剧烈振荡,振荡范围取决于输出轮齿。在轴静止时,其净效应是发出一声很大的蜂鸣声。如果这种情况持续,变速箱将提早老化。为防止这种情况,常规做法是将伺服环去调谐,使轴在未施加变速箱负载的情况下保持稳定。然而,遗憾的是,这样做会影响系统性能。由于系统具有非线性和不连续的特性,因此自适应调谐算法通常无法解决回差问题。但使用转矩变换增益是一种非常有效的回差补偿算法。该算法的关键是一个锥形的转矩变换曲线,此曲线是伺服环位置误差的函数。使用锥形曲线而非阶跃曲线的原因是,当位置误差超出回差距离时,阶跃曲线会造成转矩输出严重的不连续性。这种反推转矩会将轴向回推至对侧轮齿上,使蜂鸣效果持续存在。只有在伺服环给定加速度为零(即,不执行任何将导致变速箱轮齿啮合的加速或减速运动)时,才应运行锥形转矩曲线。如果正确配置合适的回差稳定窗口值,此算法可在不牺牲伺服性能的同时完全消除变速箱蜂鸣。“回差稳定窗口”参数决定着实施回差稳定处理的窗口宽度。通常情况下,该值应设置为测得的回差距离。“回差稳定窗口”值为零时,将实际禁用该功能。(专利申请中)制动器啮合延时AXIS_SERVO_DRIVEREALGSVSSV秒“制动器啮合延时”属性用于控制从电机制动器输出变为啮合制动器状态到驱动器继续向电机施加转矩之间的时间。电机制动器将在该延时内完成啮合。以下是与啮合电机制动器相关的一系列事件:启动禁用轴(通过 MSF 或驱动器禁用故障动作)驱动器停止跟踪给定参考信号(“伺服动作状态”位清零。)使用配置的“停止转矩”减速到零速度。达到零速度或停止时间限制。将电机制动器输出切换为 Off,以啮合电机制动器。等待制动器啮合延时。禁用驱动器功率组件。(“驱动器使能状态”位清零。)如果通过故障动作或运动控制指令关闭轴,驱动器功率组件将立即禁用,并且电机制动器立即啮合。驱动器停止跟踪给定参考信号。(“伺服动作状态”位清零。)禁用驱动器功率组件(“驱动器使能状态”位清零。)断开制动器输出,啮合制动器。制动器释放延时时间AXIS_SERVO_DRIVEREALGSVSSV秒“制动器释放延时”属性用于控制从制动器输出变为释放制动器状态到驱动器停止跟踪给定参考信号变化之间的时间。制动器将在该延时内完成释放。以下是与啮合制动器相关的一系列事件:启动启用轴(通过 MSO 或 MAH)启用驱动器功率组件。(“驱动器使能状态”位置位。)将电机制动器输出切换为 On,以释放电机制动器。**等待制动器释放延时。跟踪给定参考信号。(Servo_Action_Status 位置位。)**除非存在保持转矩,否则驱动器不会释放制动器。母线就绪状态AXIS_SERVO_DRIVEBOOL标签如果该位为:ON — 驱动器的直流母线电压足够支持运行。OFF — 驱动器的直流母线电压过低。母线调节器容量AXIS_SERVO_DRIVEREALGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。轴母线调节器的当前利用率,以额定容量百分比的形式表示。母线调节器 IDAXIS_SERVO_DRIVEINTGSV“母线调节器 ID”属性包含与轴关联的特定 A-B 母线调节器或系统分流器目录号的枚举值。如果母线调节器 ID 与实际母线调节器或分流器硬件不匹配,在驱动器配置过程中会产生错误。C2C 连接实例AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTGSV生产型/消费型轴在 C2C 映射实例下的关联 C2C 连接实例当“轴数据类型”属性指定为“消费型”时,通过指定“C2C 映射实例”和“C2C 连接实例”将此轴与消费型数据相关联。该属性是 C2C 映射实例下的连接实例,用于提供通过 C2C 连接从另一个轴发送的轴数据。对于所有其他轴数据类型,如果该轴为生产型,则将该属性设置为本地控制器映射实例 (1) 下的连接实例,用于通过 C2C 连接发送远程轴数据。C2C 映射实例AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTGSV生产型/消费型轴的关联 C2C 映射实例当“轴数据类型”属性指定为“消费型”时,通过指定“C2C 映射实例”和“C2C 连接实例”将该轴与消费型数据相关联。对于所有其他轴数据类型,如果该轴为生产型,则将此属性设为 1(一),表明与本地控制器映射实例的连接已断开。给定加速度AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUAL重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。给定加速度,单位为位置单位/秒^2“给定加速度”是指轴的给定加速度,以配置的轴位置单位/秒^2 表示,由任何先前的运动指令生成。该值按每个近似更新间隔内给定速度的当前增量进行计算。给定加速度是有符号的值,符号(+ 或 -)取决于轴按命令进行运动的方向。给定加速度是有符号的浮点值。其分辨率不取决于平均速度时基,而取决于轴的转换常数,并且系统内部将给定速度分辨率限定为不超出 0.00001 个反馈计数/近似更新周期^2。给定位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。给定位置,单位为位置单位“给定位置”是物理轴的所需或给定位置,以该轴所配置的位置单位表示,由控制器在响应先前任何运动位置控制指令时生成。给定位置数据由控制器通过进行中的同步数据传输过程传输给物理轴,这会导致延迟一个近似更新周期。因此,获得的给定位置值是从现在起一个近似更新周期后物理伺服轴将要使用的给定位置。下图显示了带有激活伺服环的轴的实际位置、给定位置和位置误差之间的关系。实际位置是由反馈设备(例如编码器)测得的轴当前位置。位置误差是伺服环的给定位置与实际位置之差,用于驱动电机以使实际位置等于给定位置。
平均速度时基AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSVSSV秒“平均速度时基”属性用于指定计算轴的平均速度所需的时间(以秒为单位)。当请求平均速度值时,首先获取由“平均速度时基”给出的时间内轴行进的总距离,然后将该值除以时基即可。平均速度时基的值应足够大,大到足以滤除可能引发“噪声”速度值的小幅速度变化,但又必须足够小,小到足以跟踪轴速度的大幅变化。通常,介于 0.25 与 0.5 秒之间的值能够适用于大多数应用。轴地址AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALGSV用于调试。轴配置状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTGSV轴配置状态机的状态“轴配置状态”属性用于调试,以指示该轴当前在轴配置状态机中所处的状态。即使是消费型和虚拟轴也可利用此属性。如果属性如下:128 — 轴已配置并已准备就绪,可以使用。非 128 — 轴未配置。轴控制位AXIS_SERVOAXIS_SERVO_DRIVEDINTGSV位0 = 中止过程请求1 = 关闭请求2 = 零 DAC 请求3 = 中止归零请求4 = 中止事件请求5-14 = 保留15 = 更改给定参考中止过程如果该位置位,则轴上的所有激活调试或测试过程都将中止。关闭请求如果该位置位,轴将强制进入关闭状态。对于 AXIS_SERVO 数据类型,正常触点断开,DAC 输出跳变为 0。零 DAC 请求 — 仅适用于 AXIS_SERVO 数据类型如果该位置位,伺服模块将使该轴的 DAC 输出强制设为零伏。只有当轴处于Direct Drive状态且驱动器已启用但无伺服操作时,该位才会产生影响。中止归零请求如果该位置位,所有激活的归零过程都将取消。中止事件请求如果该位置位,所有激活的记录或监视事件过程都将取消。更改给定参考如果该位置位,控制器会切换到给定位置的新位置坐标系统。当伺服模块或驱动器处理来自控制器的新给定位置数据,以确定是否考虑因参考点变换而引入的偏移量时,会使用该位。当轴通过将“更改给定参考”位清零来确认参考位置的更改已完成时,该位清零。轴数据类型AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTMSG相关的运动轴标签数据类型:0 = 反馈1 = 消费型2 = 虚拟3 = 通用4 = 伺服5 = 伺服驱动器6 = 通用驱动器“轴数据类型”属性用于确定创建并适用于该轴实例的数据模板、内存格式和属性集。该属性只能在轴创建服务期间设置。反馈与仅反馈模块(如 PLS II 和 CFE)相关的仅反馈轴,支持正交编码器、旋转变压器和 HiperFace 等。消费型使用由另一个控制器上的运动轴生成的轴运动数据的消费型轴。虚拟具有运动轨迹规划器全部功能,但与任何物理设备无关的虚拟轴。通用具有运动轨迹规划器全部功能,但不支持集成配置的轴。通用轴与 1756-DM 等设备相关联。伺服具有运动轨迹规划器全部功能,并支持集成配置的轴。伺服轴与闭合伺服环并向外部驱动器发送模拟给定值的模块(即 1756-M02AE、1756-HYD02 和 1756-M02AS 模块)相关联。伺服驱动器具有运动轨迹规划器全部功能,并支持集成配置的轴。伺服驱动器轴与向外部驱动器发送数字给定值的数字驱动器接口模块(即 1756-M03SE、1756-M08SE 和 17556-M16SE(SERCOS 接口))相关联。通用驱动器符合扩展封装外形并处于 1756-M08SEG 模块环网中的 SERCOS 接口驱动器的轴。轴事件AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINT标签用于以一个 32 位字访问所有事件状态位。该标签与轴事件位属性相同。事件状态位监视事件已装备状态0监视事件状态1记录事件 1 已装备状态2记录事件 1 状态3记录事件 2 已装备状态4记录事件 2 状态5归零事件已装备状态6归零事件状态7轴事件位AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTGSV用于以一个 32 位字访问所有事件状态位。该属性与轴事件标签相同。事件状态位监视事件已装备状态0监视事件状态1记录事件 1 已装备状态2记录事件 1 状态3记录事件 2 已装备状态4记录事件 2 状态5归零事件已装备状态6归零事件状态7轴故障AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINT标签轴故障如下:故障类型位物理轴故障0模块故障1配置故障2该属性与轴故障位属性相同。轴故障位AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTGSV*轴故障如下:故障类型位物理轴故障0模块故障1配置故障2组故障3该属性与轴故障标签相同。轴信息选项 1轴信息选项 2AXIS_SERVOAXIS_SERVO_DRIVEDINTGSVGSV轴具有一组默认情况下不会更新的属性。若要使用其中一种属性,必须选择该属性作为轴的实时轴信息。否则,当轴运行时,该属性的值不会发生变化,并且不会显示正确的值。最多可选择其中的 2 个属性。若要使用 GSV 指令选择其中一种属性作为“实时轴信息”,可将“轴信息选项 1”或“轴信息选项 2”属性设置如下。AXIS_SERVOAXIS_SERVO_DRIVE值无(默认)无(默认)1给定位置给定位置2位置反馈位置反馈3辅助位置反馈辅助位置反馈4位置误差位置误差5位置积分误差位置积分误差6给定速度给定速度7速度误差速度误差8速度积分误差速度积分误差9给定加速度给定加速度10加速度反馈加速度反馈11伺服输出水平12标记距离标记距离13给定转矩14转矩反馈15正向动态转矩限制16负向动态转矩限制17电机容量18驱动器容量19电源容量20母线调节器容量21电机电角度22转矩限制源23直流母线电压24绝对偏移25轴实例AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALINTGSV分配给轴的实例编号“轴实例”属性用于返回轴的实例编号。针对轴严重故障生成的严重故障记录只包含不合要求的轴的实例。用户通常会使用该属性确定轴是否不合要求(即,实例编号是否匹配)。轴响应位AXIS_SERVOAXIS_SERVO_DRIVEDINTGSV位0 = 中止过程应答1 = 关闭应答2 = 零 DAC 应答3 = 中止归零应答4 = 中止事件应答5-14 = 保留15 = 更改参考位置中止过程应答如果该位置位,说明调谐或测试过程已中止。关闭应答如果该位置位,说明已使轴强制进入关闭状态。零 DAC 应答 — 仅适用于 AXIS_SERVO 数据类型如果该位置位,说明该轴的 DAC 输出已设置为零伏。中止归零应答如果该位置位,说明激活状态的归零过程已中止。中止事件应答如果该位置位,说明激活状态的记录或监视位置事件过程已中止。更改参考位置如果该位置位,说明伺服环已切换为新的位置坐标系统。当控制器处理来自伺服模块或驱动器的新位置数据,以确定是否考虑因参考点变换而引入的偏移量时,会使用该位。当控制器通过将“更改给定参考”位清零来确认参考位置的更改已完成时,该位清零。轴工作状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTGSV轴的工作状态。0 = 轴就绪1 =Direct Drive控制2 = 伺服控制3 = 轴故障4 = 轴关闭5 = 轴禁止6 = 轴未分组7 = 无模块8 = 正在配置轴内部状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINT标签用于以一个 32 位字访问所有轴状态位。该标签与轴状态位属性相同。轴内部状态位伺服动作状态0驱动器使能状态1关闭状态2正在更新配置3禁止状态4轴状态位AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTGSV*用于以一个 32 位字访问所有轴状态位。该属性与“轴状态”标签相同。轴内部状态位伺服动作状态0驱动器使能状态1关闭状态2正在更新配置3禁止状态4轴类型AXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEINTGSVSSV“轴类型”属性用于确定轴的预期用途。若:将该属性设置为:该轴未在应用中使用(当系统中轴的个数为奇数时,通常会出现这种情况)0只需要从反馈接口获得位置信息1该轴将用于完整的伺服运行2轴类型不仅用于限定与轴伺服环相关的许多操作,还可以控制伺服模块轴状态指示灯的行为。轴类型为“1”(仅反馈)时,DRIVE 指示灯熄灭,为“0”(未使用)时,FDBK 和 DRIVE 指示灯均熄灭。Logix Designer应用程序还使用当前配置的轴类型值来控制许多与配置轴相关的对话框外观。回差反向偏移AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV“回差反向偏移”用于补偿由机械回差引入的位置误差。例如,动力传动型的应用对于机械操作期间的准确性和可重复性有较高要求。轴运动通常在许多机械零件(如电机、变速箱和滚珠丝杠)共同作用下产生,这就可能影响准确性,并造成零件的磨损。因此,当轴在指令作用下沿反方向运动时,机器中的机械间隙(通过传动和滚珠丝杠等产生)可能会产生电机小幅运动而轴不运动的情况。这样造成的结果是,尽管轴实质上并未发生运动,而反馈设备却可能指示轴已经运动。若要补偿机械回差,可在运动轨迹规划器的给定位置基础上加上由“回差反向偏移”属性指定的有方向偏移,然后再将结果应用到伺服环。每当给定速度的符号发生更改(反向)时,Logix 控制器都会在当前给定位置的基础上加上或减去回差距离值。这将导致伺服系统立即将电机移至回差窗口的另一端并啮合负载。务必注意,这种有方向偏移的应用对用户完全透明;此偏移不会对“给定位置”属性的值产生任何影响。如果将零值应用于“回差反向偏移”,则实际上是禁用了此功能。一旦通过非零值启用此功能,并且通过将给定运动反向使负载啮合后,更改“回差反向偏移”会导致向给定位置应用偏移校正时轴发生运动。回差稳定窗口AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV“回差稳定窗口”参数用于控制伺服控制环的回差稳定功能。下面将详细介绍该功能及常见的回差不稳定现象。在使用机械变速箱的应用中,机械回差是一个常见问题。产生这种问题的深层原因在于,当输入齿轮转至其近端轮齿与输出齿轮的相邻轮齿接触前,电机感受不到输出的反射惯量。也就是说,当轮齿未啮合时,系统惯量降至电机惯量。如果对伺服环进行调谐使其达到在负载情况下的最佳性能条件,则在轮齿未啮合时,最好的状况是,轴处于欠阻尼状态,而最坏的状况是,轴处于不稳定状态。在最坏状况下,电机轴与输入齿轮将剧烈振荡,振荡范围取决于输出轮齿。在轴静止时,其净效应是发出一声很大的蜂鸣声。如果这种情况持续,变速箱将提早老化。为防止这种情况,常规做法是将伺服环去调谐,使轴在未施加变速箱负载的情况下保持稳定。然而,遗憾的是,这样做会影响系统性能。由于系统具有非线性和不连续的特性,因此自适应调谐算法通常无法解决回差问题。但使用转矩变换增益是一种非常有效的回差补偿算法。该算法的关键是一个锥形的转矩变换曲线,此曲线是伺服环位置误差的函数。使用锥形曲线而非阶跃曲线的原因是,当位置误差超出回差距离时,阶跃曲线会造成转矩输出严重的不连续性。这种反推转矩会将轴向回推至对侧轮齿上,使蜂鸣效果持续存在。只有在伺服环给定加速度为零(即,不执行任何将导致变速箱轮齿啮合的加速或减速运动)时,才应运行锥形转矩曲线。如果正确配置合适的回差稳定窗口值,此算法可在不牺牲伺服性能的同时完全消除变速箱蜂鸣。“回差稳定窗口”参数决定着实施回差稳定处理的窗口宽度。通常情况下,该值应设置为测得的回差距离。“回差稳定窗口”值为零时,将实际禁用该功能。(专利申请中)制动器啮合延时AXIS_SERVO_DRIVEREALGSVSSV秒“制动器啮合延时”属性用于控制从电机制动器输出变为啮合制动器状态到驱动器继续向电机施加转矩之间的时间。电机制动器将在该延时内完成啮合。以下是与啮合电机制动器相关的一系列事件:启动禁用轴(通过 MSF 或驱动器禁用故障动作)驱动器停止跟踪给定参考信号(“伺服动作状态”位清零。)使用配置的“停止转矩”减速到零速度。达到零速度或停止时间限制。将电机制动器输出切换为 Off,以啮合电机制动器。等待制动器啮合延时。禁用驱动器功率组件。(“驱动器使能状态”位清零。)如果通过故障动作或运动控制指令关闭轴,驱动器功率组件将立即禁用,并且电机制动器立即啮合。驱动器停止跟踪给定参考信号。(“伺服动作状态”位清零。)禁用驱动器功率组件(“驱动器使能状态”位清零。)断开制动器输出,啮合制动器。制动器释放延时时间AXIS_SERVO_DRIVEREALGSVSSV秒“制动器释放延时”属性用于控制从制动器输出变为释放制动器状态到驱动器停止跟踪给定参考信号变化之间的时间。制动器将在该延时内完成释放。以下是与啮合制动器相关的一系列事件:启动启用轴(通过 MSO 或 MAH)启用驱动器功率组件。(“驱动器使能状态”位置位。)将电机制动器输出切换为 On,以释放电机制动器。**等待制动器释放延时。跟踪给定参考信号。(Servo_Action_Status 位置位。)**除非存在保持转矩,否则驱动器不会释放制动器。母线就绪状态AXIS_SERVO_DRIVEBOOL标签如果该位为:ON — 驱动器的直流母线电压足够支持运行。OFF — 驱动器的直流母线电压过低。母线调节器容量AXIS_SERVO_DRIVEREALGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。轴母线调节器的当前利用率,以额定容量百分比的形式表示。母线调节器 IDAXIS_SERVO_DRIVEINTGSV“母线调节器 ID”属性包含与轴关联的特定 A-B 母线调节器或系统分流器目录号的枚举值。如果母线调节器 ID 与实际母线调节器或分流器硬件不匹配,在驱动器配置过程中会产生错误。C2C 连接实例AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTGSV生产型/消费型轴在 C2C 映射实例下的关联 C2C 连接实例当“轴数据类型”属性指定为“消费型”时,通过指定“C2C 映射实例”和“C2C 连接实例”将此轴与消费型数据相关联。该属性是 C2C 映射实例下的连接实例,用于提供通过 C2C 连接从另一个轴发送的轴数据。对于所有其他轴数据类型,如果该轴为生产型,则将该属性设置为本地控制器映射实例 (1) 下的连接实例,用于通过 C2C 连接发送远程轴数据。C2C 映射实例AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALSINTGSV生产型/消费型轴的关联 C2C 映射实例当“轴数据类型”属性指定为“消费型”时,通过指定“C2C 映射实例”和“C2C 连接实例”将该轴与消费型数据相关联。对于所有其他轴数据类型,如果该轴为生产型,则将此属性设为 1(一),表明与本地控制器映射实例的连接已断开。给定加速度AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUAL重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。给定加速度,单位为位置单位/秒^2“给定加速度”是指轴的给定加速度,以配置的轴位置单位/秒^2 表示,由任何先前的运动指令生成。该值按每个近似更新间隔内给定速度的当前增量进行计算。给定加速度是有符号的值,符号(+ 或 -)取决于轴按命令进行运动的方向。给定加速度是有符号的浮点值。其分辨率不取决于平均速度时基,而取决于轴的转换常数,并且系统内部将给定速度分辨率限定为不超出 0.00001 个反馈计数/近似更新周期^2。给定位置AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。给定位置,单位为位置单位“给定位置”是物理轴的所需或给定位置,以该轴所配置的位置单位表示,由控制器在响应先前任何运动位置控制指令时生成。给定位置数据由控制器通过进行中的同步数据传输过程传输给物理轴,这会导致延迟一个近似更新周期。因此,获得的给定位置值是从现在起一个近似更新周期后物理伺服轴将要使用的给定位置。下图显示了带有激活伺服环的轴的实际位置、给定位置和位置误差之间的关系。实际位置是由反馈设备(例如编码器)测得的轴当前位置。位置误差是伺服环的给定位置与实际位置之差,用于驱动电机以使实际位置等于给定位置。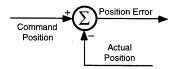 若在轴运动时,根据轴的当前位置执行运动计算和增量运动,给定位置非常有用。使用给定位置(而非实际位置)可避免执行计算时因轴位置误差而引入累积误差。给定速度AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。若在轴运动时,根据轴的当前位置执行运动计算和增量运动,给定位置非常有用。使用给定位置(而非实际位置)可避免执行计算时因轴位置误差而引入累积误差。公共母线故障AXIS_SERVO_DRIVEBOOL标签如果将驱动器配置为公共母线从设备模式,而又为其提供三相电源,则驱动器将关闭。如果发生此类情况,该位将置位。通信故障AXIS_SERVO_DRIVEDINTBOOL当驱动器轴的相关换向反馈源出现问题,导致该驱动器无法接收正确或可靠的电机轴信息以执行换向时,该位置位。配置故障AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签未成功更新相关运动控制模块的轴配置属性时置位。有关配置故障的具体信息,请参见与运动控制模块相关的“属性错误代码”和“属性错误 ID”属性。是否希望在出现该故障时向控制器指示严重故障?是 - 将运动组的“常见故障类型”设为严重故障。否 - 必须编写代码处理这些故障。正在更新配置AXIS_CONSUMEDAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签使用 SSV 指令更改某个属性后,控制器会将更改内容发送到运动控制模块。如果希望等待更改完成,应监视轴的 ConfigUpdateInProcess 位。如果该位为:ON — 控制器正在更改属性。OFF — 更改完毕。连续转矩限制AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比“转矩限制”属性可用于控制由驱动器的电机热模型施加的连续转矩限制。增大“连续转矩限制”值可使最大允许连续电机转矩随之增大,当达到该最大允许值后,驱动器会将电机电流折返或者声明出现电机热故障。对于配备了特殊冷却设备的电机,“连续转矩限制”值可位置为大于 100% 额定值,以便电机提供更高的连续转矩输出。对于在较高环境温度条件下运行的电机,“连续转矩限制”可配置为小于 100% 额定转矩,以防电机过热。“连续转矩限制”值用于指定驱动器可连续或基于 RMS 而给定的电机额定电流的最大百分比。例如,如果连续转矩限制为 150%,则送入电机的连续电流将限定在电机额定连续电流值的 1.5 倍。控制同步故障AXIS_CONSUMEDAXIS_SERVOAXIS_SERVO_DRIVEBOOL标签如果该位置位,表明控制器与运动控制模块之间的通信中断,连续错过多个位置更新。控制器最多可错过 4 个位置更新。之后,“控制同步故障”位置位。运动控制模块可能随后会出现故障,或者可能已经出现故障。对于消费型轴,该位表示与生产型控制器之间的通信中断。当重新建立通信后,此位清零。由变换控制状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签如果该位为:ON — 变换正在使轴运动。OFF — 变换未使轴运动。转换常数AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSVSSV计数/位置单位范围 = 0.1 - 1e12默认值 = 8000.0要以“位置单位”字符串属性所指定的位置单位显示轴位置并进行运动控制编程,必须为每个轴确定一个转换常数。通过转换常数(有时称为 K 常数),可将轴对象的单位在轴位置单位与反馈计数之间进行转换。具体而言,K 代表每个位置单位的反馈计数值。请注意,基于 1756M02AE 编码器的伺服模块使用 4 倍编码器反馈解码(对通道 A 和 B 的两个边沿计数)。计数方向由边沿方向和对侧通道的状态决定。通道 A 引导通道 B 时,增加计数。这是增量式编码器最常用的解码模式,因为此时的分辨率最高。例如,假设该伺服轴使用直接与 5 螺距滑动丝杠耦合的电机中的 1000 线编码器(每英寸 5 转)。此时使用用户定义的英寸位置单位,按如下方式计算转换常数:K = 1000 线/转 * 4 计数/线 * 5 转/英寸 = 20,000 计数/英寸。重要提示: 如果更改了转换常数,则“说明”列中带有“位置单位”转换的所有可配置属性都将无效。要想这些属性有效,必须在设置任何受影响的属性(包括使用默认值)之前,将“转换常数”设置为所需的值。协调运动状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签如果当前针对轴激活任何协调运动曲线,则该位置位。协调运动完成或停止后,该位即清零。阻尼系数AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV“阻尼系数”属性值用于在执行 MRAT(运动运行轴调谐)指令期间计算“最大位置伺服带宽”(参见下文)。通常,“阻尼系数”属性控制着伺服轴的动态响应。当使用较小的阻尼系数(例如 0.7)调谐增益时,对轴执行阶跃响应测试时,可能产生速度过冲的欠阻尼行为。使用较大的阻尼系数(例如 1.0)时,生成的增益集将产生无过冲的系统阶跃响应,但该响应的伺服带宽将显著减小。“阻尼系数”的默认值为 0.8,能够适用于大多数应用。直流母线电压AXIS_SERVO_DRIVEDINTGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。伏特该参数为驱动器直流母线上的当前电压。减速状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签轴当前在指令的作用下减速时置位。“加速状态”位和“减速状态”位用于查看轴正否正在加速或减速。如果这两个位均处于清零状态,说明轴正以稳定速度运动或保持静止。Direct Drive斜坡速率AXIS_SERVOREALGSVSSV伏特/秒“Direct Drive斜坡速率”属性是指在执行“Direct Drive开启”(MDO) 指令时用来改变输出电压的电压转换速率。Direct Drive斜坡速率为 0 时,将禁用输出斜坡速率限制器,允许直接施加Direct Drive开电压。方向变换比AXIS_SERVOREALGSVSSV某些情况下,外部驱动器致动器的速度变换可能与方向相关。这种非线性在液压应用中至关重要。为补偿这种行为,可基于伺服输出的符号将“方向变换比”属性应用于“速度变换”属性。具体而言,当伺服输出的符号为正时,“速度变换”属性值需经“方向变换比”进行变换。因此,“方向变换比”是正方向(正伺服输出)“速度变换”值与负方向(负伺服输出)“速度变换”值之比。先后在正方向和负方向上运行自动调谐过程,并计算所得速度/转矩变换值的比率,即可确定出“方向变换比”的经验值。驱动器轴 IDAXIS_SERVO_DRIVEINTGSV驱动器放大器的产品代码“驱动器 ID”属性包含与轴相关的驱动器放大器的 CIP 产品代码。如果该产品代码与实际驱动器放大器的代码不匹配,在配置过程中将产生错误。驱动器容量AXIS_SERVO_DRIVEREALGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。驱动器容量的当前利用率,以额定容量百分比的形式表示。驱动器控制电压故障AXIS_SERVO_DRIVEBOOL标签当驱动器电路的相关电源电压下降至超出可接受限制范围时,该位置位。驱动器冷却故障AXIS_SERVO_DRIVEBOOL标签当驱动器控制电路的环境温度超出驱动器关机环境温度时,该位置位。驱动器使能输入故障AXIS_SERVO_DRIVEBOOL标签如果发生以下两种可能情况之一,则将声明出现该故障:1) 尝试在驱动器使能输入未激活时启用轴(通常通过 MSO 或 MAH 指令)。2) 在轴处于使能状态下,驱动器使能输入从激活状态跳变为非激活状态。只有在“故障配置位”属性中的“驱动器使能输入故障处理”位置位时,才会发生此故障。如果“驱动器使能输入故障动作”设置为“停止命令”,并且轴因“驱动器使能输入故障”而停止,则在故障清除前,故障轴无法移动。如果尝试使用运动指令使处于故障状态的轴运动,会导致指令错误。小贴士: 如果将“驱动器使能故障动作”设置为“仅状态”或“停止命令”,并尝试在驱动器使能输入处于激活状态时启用轴(通常通过 MSO 或 MAH 指令),则轴会在故障状态下启用,指示出现驱动器使能输入故障。将“驱动器使能故障动作”设置为“停止命令”时,用于启用轴并发起运动的指令 (MAH, MRAT, MAHD) 将中止运动过程,同时将指令的 IP 和 PC 位清零。该故障条件会锁定,并需要执行显式 MAFR(运动轴故障复位)或 MASR(运动轴关闭复位)指令方可清零。在驱动器使能输入仍处于非激活状态且驱动器处于使能状态时,任何操作均无法清除故障。但如果驱动器被禁用,在驱动器使能输入未激活的情况下可以清除驱动器使能输入故障。如果“驱动器使能输入检查”位清零,则驱动器使能输入的状态无关紧要,此时在上述任何情况下都不会声明发生故障。驱动器使能输入故障动作AXIS_SERVO_DRIVESINTGSVSSV故障动作关闭禁用驱动器停止运动仅状态值0123驱动器使能状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签AXIS_SERVO如果该位为:ON — 轴的驱动器使能输出接通。OFF — 轴的驱动器使能输出关闭。AXIS_SERVO_DRIVE如果该位为:ON — 驱动器的功率组件激活。OFF — 驱动器的功率组件未激活。驱动器故障AXIS_SERVOBOOL标签如果该位置位,表明外部伺服驱动器检测到故障并通过驱动器故障输入将该故障通知给伺服模块。该故障条件会锁定,并需要执行显式 MAFR(运动轴故障复位)或 MASR(运动轴关闭复位)指令方可清零。驱动器故障AXIS_SERVO_DRIVEDINT标签用于以一个 32 位字访问所有驱动器故障位。该标签与驱动器故障位属性相同。标签位正向软超程故障0负向软超程故障1正向硬超程故障2负向硬超程故障3电机反馈故障4电机反馈噪声故障5辅助反馈故障6辅助反馈噪声故障7保留8驱动器使能输入故障9公共母线故障10预充电过载故障11保留12接地短路故障13驱动器硬件故障14超速故障15过载故障16驱动器过热故障17电机过热故障18驱动器冷却故障19驱动器冷却电压故障20反馈故障21通信故障22驱动器过电流故障23驱动器过压故障24驱动器欠电压故障25电源缺相故障26位置误差故障27SERCOS 故障28超程故障29保留30制造商专有故障31是否希望在出现上述任一故障时向控制器指示严重故障?是 - 将运动组的“常见故障类型”设为严重故障。否 - 必须编写代码处理这些故障。驱动器故障动作AXIS_SERVOSINTGSVSSV故障动作关闭禁用驱动器停止运动仅状态值0123驱动器故障位AXIS_SERVO_DRIVEDINTGSV用于以一个 32 位字访问所有驱动器故障位。该属性与驱动器故障标签相同。标签位正向软超程故障0负向软超程故障1正向硬超程故障2负向硬超程故障3电机反馈故障4电机反馈噪声故障5辅助反馈故障6辅助反馈噪声故障7保留8驱动器使能输入故障9公共母线故障10预充电过载故障11保留12接地短路故障13驱动器硬件故障14超速故障15过载故障16驱动器过热故障17电机过热故障18驱动器冷却故障19驱动器冷却电压故障20反馈故障21通信故障22驱动器过电流故障23驱动器过压故障24驱动器欠电压故障25电源缺相故障26位置误差故障27SERCOS 故障28超程故障29保留30制造商专有故障31是否希望在出现上述任一故障时向控制器指示严重故障?是 - 将运动组的“常见故障类型”设为严重故障。否 - 必须编写代码处理这些故障。驱动器故障输入状态AXIS_SERVOBOOL标签用于指示是否存在故障的驱动器数字输出。如果该位为:ON — 驱动器存在故障。OFF — 驱动器不存在故障。驱动器硬件故障AXIS_SERVO_DRIVEBOOL标签驱动器检测到严重硬件故障时,该位置位。驱动器模型时间常数AXIS_SERVOAXIS_SERVO_DRIVEREALGSV SSV秒“驱动器模型时间常数”值表示驱动器电流环的集总模型时间常数,MRAT 指令将使用该常数计算最大速度和位置伺服带宽值。驱动器模型时间常数是驱动器电流环时间常数、反馈采样周期及与速度反馈滤波器相关的时间常数之和。在配置轴时,该值被设置为默认值。轴类型详细信息AXIS_SERVO只有当轴配置为外部转矩伺服驱动器时,该值才由 MRAT 使用。AXIS_SERVO_DRIVE由于速度反馈滤波器的带宽取决于反馈设备的分辨率,所以采用高分辨率反馈设备时,驱动器模型时间常数值更小。驱动器过电流故障AXIS_SERVO_DRIVEBOOL标签当驱动器输出电流超出驱动器的预定义工作电流限制值时,该位置位。驱动器过热故障AXIS_SERVO_DRIVEBOOL标签当驱动器温度超过驱动器关机温度时,该位置位。驱动器过压故障AXIS_SERVO_DRIVEBOOL标签当驱动器直流母线电压超出该母线的预定义工作电压限制值时,该位置位。驱动器极性AXIS_SERVO_DRIVEDINTGSVSSV0 = 自定义极性1 = 正极性2 = 负极性自定义极性“自定义极性”用于支持使用 SERCOS 接口标准定义的各种极性参数自定义极性配置。正/负极性“正极性”和“负极性”位属性决定着驱动器伺服环的总体极性。所有高级极性参数均根据驱动器极性的正负来自动设置。正确接线可确保伺服环是闭合的负反馈系统。但对于给定应用,不能保证伺服驱动器的正方向与用户的正方向相同。“负极性”将反转伺服驱动器给定位置和实际位置数据的极性。因此,通过选择正或负驱动器极性,可以将驱动器的正方向配置为与用户的正方向一致。使用 MRHD 和 MAHD 运动指令可自动配置该属性。驱动器分辨率AXIS_SERVO_DRIVEDINTGSV驱动器计数/驱动器单位“驱动器分辨率”属性决定着每个驱动器单位所对应的驱动器计数。根据具体的驱动器应用,驱动器单位可配置为转、英寸或毫米。此外,配置的驱动器单位可应用于电机或辅助反馈设备。所有位置、速度和加速数据在输入驱动器之前,均基于驱动器分辨率和转换常数由用户的位置单位变换为驱动器单位。转换常数与驱动器分辨率之比决定着每个驱动器单位对应的位置单位数。转换常数/驱动器分辨率 = 驱动器单位(转、英寸或毫米)/位置单位相反,所有来自驱动器的位置、速度和加速数据均基于驱动器分辨率和转换常数由用户的位置单位变换为驱动器单位。驱动器分辨率与转换常数之比决定着每个驱动器单位对应的位置单位数。驱动器分辨率/转换常数 = 位置单位/驱动器单位(转、英寸或毫米)通常,无论驱动器所用反馈设备的分辨率如何,“驱动器分辨率”值可始终为默认值:200000 驱动器计数/驱动器单位。这是因为驱动器本身有一组变换系数,用于将反馈计数与驱动器计数相关联。驱动器行程范围限值由于根据 SERCOS 接口标准,驱动器位置参数最终受到有符号 32 位表示形式的限制,因此驱动器分辨率参数会影响驱动器的行程范围。根据驱动器分辨率确定最大行程范围的公式如下:驱动器行程范围限值 = +/- 2,147,483,647/驱动器分辨率。每驱动器单位默认对应 200,000 驱动器计数,因此驱动器的范围限值为 10,737 个驱动器单位。尽管这一行程范围限值引发问题的情况相对很少,但通过降低驱动器分辨率可以轻松地增大行程范围。这样做的缺点是,位置数据会以较低的分辨率传递,这可能会影响运动的平滑度。小数归位但在某些情况下,用户可能还应专门配置运动分辨率值来处理小数归位应用或多转绝对式应用(要求循环补偿)。这些情况下,旋转应用程序的归位值并非整数值,则“旋转位置变换”属性可能会修正为可被归位值整除的值。以下示例解释了如何配合使用“驱动器分辨率”值和“转换常数”来处理不同的应用。旋转齿轮头(无辅助反馈设备)根据旋转电机选型,驱动器分辨率表示为驱动器计数/电机每转,并应用于旋转位置分辨率 IDN。用户将转换常数设置为驱动器计数/用户定义位置单位。对于 3:1 变速箱,如果用户位置单位为齿轮输出轴转数,则转换常数为 200,000/3,这是不合理的!但在这种情况下,可以将驱动器分辨率设置为 300,000 驱动器计数/电机每转,然后将转换常数设置为 100,000 驱动器计数/输出轴每转。该系统可以在不损失任何机械精度的情况下使用该配置,也就是说,每整转的输出轴运动将使输出轴恰好移动 1 转。线性滚珠丝杠(无辅助反馈设备)根据旋转电机选型,驱动器分辨率表示为驱动器计数/电机每转,并应用于旋转位置分辨率 IDN。用户将转换常数设置为驱动器计数/用户定义位置单位。对于 5 毫米螺距的滚珠丝杠,如果用户位置单位为毫米,则用户可将转换常数设置为 200,000/5 或 40,000 驱动器计数/毫米(默认驱动器分辨率值为 200,000 驱动器计数/电机每转)。如果螺距不合理,解决这个问题的方法与“旋转齿轮头(无辅助反馈设备)”中所述的方法相同。旋转齿轮头(带辅助反馈设备)根据旋转电机选型,驱动器分辨率表示为驱动器计数/辅助设备每转,并应用于旋转位置分辨率 IDN。根据伺服环配置,位置以辅助反馈设备为基础,因此各变换类型的“数据参考”位应为“参考负载”而非“参考电机”。电机反馈为旋转式,分辨率以周期数/电机每转表示。辅助反馈设备同样为旋转式,分辨率以周期数/辅助设备每转表示。辅助反馈比设置为辅助反馈转数/电机每转,并在内部应用到 IDN 121 和 122,用于在双伺服环配置中将位置伺服环计数与速度伺服环计数建立关联。“辅助反馈比”属性还用于在配置过程中根据所选电机的规范计算范围限值和默认值。对于 3:1 变速箱,如果用户位置单位为齿轮箱输出轴转数,则转换常数仍合理,因为此时的变换设置为“参考负载”!用户可基于 200,000 驱动器计数/辅助设备每转的默认驱动器分辨率值将转换常数设置为 200,000 驱动器计数/输出轴每转。该系统可以在不损失任何机械精度的情况下使用该配置,也就是说,每整转的输出轴运动将使输出轴恰好移动 1 转。线性滚珠丝杠/滚珠丝杠组合(带辅助反馈设备)根据线性辅助设备反馈选型,驱动器分辨率以驱动器计数/线性单位表示(例如毫米,公制位选择),并应用于线性位置数据变换 IDN。根据伺服环配置,位置以辅助反馈设备为基础,因此各变换类型的“数据参考”位同样应为“参考负载”而非“参考电机”。电机反馈为旋转式,分辨率以周期数/电机每转表示。辅助反馈设备为线性,分辨率以周期数/毫米表示。辅助反馈比设置为辅助反馈单位数/电机每转,并在内部应用到 IDN 123,用于在双伺服环配置中将位置伺服环计数与速度伺服环计数建立关联。“辅助反馈比”属性还用于在配置过程中根据所选电机的规范计算范围限值和默认值。如果在应用中使用 3:1 变速箱和 5 毫米螺距的滚珠丝杠,并且用户的位置单位为厘米,转换常数依然合理,因为选择了“参考负载”!用户可根据 200000 驱动器计数/毫米的默认驱动器分辨率值将转换常数设置为 20,000 驱动器计数/厘米。该系统可以在不损失任何机械精度的情况下使用该配置,也就是说,10 厘米的移动将使致动器恰好移动 10 厘米。驱动器变换位AXIS_SERVO_DRIVEDINTGSV“驱动器变换位”属性配置直接源自“驱动器单位”属性。位0 = 变换类型0 - 标准1 - 自定义1 = 变换单位0 - 旋转1 - 线性2 = 线性变换单位0 - 公制1 - 英制3 = 数据参考0 - 电机1 - 负载变换类型“变换类型”位属性用于允许按 SERCOS 接口标准定义的位置、速度、加速度和转矩变换参数实现自定义变换。当该位清零(默认)时,将完全根据首选的Rockwell AutomationSERCOS 驱动器变换系数对这些变换参数进行设置。目前,Logix 不支持自定义变换。变换单位“变换单位”属性用于确定控制器是否根据旋转或线性变换参数及由 SERCOS 接口标准定义的关联驱动器单位来变换位置、速度和加速度属性。当该位清零(默认)时,SERCOS 位置数据变换、速度数据变换和加速度数据变换参数中的相应位也随之清零,指示驱动器使用旋转变换参数。当该位置位时,SERCOS 位置数据变换、速度数据变换和加速度数据变换参数中的相应位也随之置位,指示驱动器使用线性变换参数。线性变换单位“变换单位”设置为线性时,“线性变换”位属性用来确定控制器是根据 SERCOS 接口标准定义的公制还是英制驱动器单位来变换位置、速度和加速度属性。当该位清零(默认)时,SERCOS 位置数据变换、速度数据变换和加速度数据变换参数中的相应位也随之清零,指示驱动器使用公制变换参数。当该位置位时,SERCOS 位置数据变换、速度数据变换和加速度数据变换参数中的相应位也随之置位,指示驱动器使用英制单位进行变换。如果变换单位设置为旋转,则线性变换单位不起作用。下表列出了在与 Rockwell SERCOS 驱动器产品对接时标准驱动器单位与变换单位和线性变换单位位选择的对应关系。标准驱动器单位公制英语 (English)旋转转转线性毫米英寸数据参考“数据参考”位用于确定位置、速度、加速度和转矩数据以机械传动的哪一侧为参考。如果选择电机,则位置、速度、加速度和转矩数据以传动的电机侧为参考。如果选择负载,则位置、速度、加速度和转矩数据以传动的负载侧为参考。上述结论仅适用于使用辅助反馈设备的情况。驱动器状态位AXIS_SERVO_DRIVEDINTGSV标签用于以一个 32 位字访问所有驱动器状态位。该属性与驱动器状态标签相同。标签位伺服动作状态0驱动器使能状态1关闭状态2过程状态3母线就绪状态4保留5归零输入状态6记录 1 输入状态7记录 2 输入状态8正向超程输入状态9负向超程输入状态10使能输入状态11加速度限制状态12绝对参考状态13安全中断模式激活状态(需要使用驱动器固件 1.85 或更高版本)14保留14保留15速度锁定状态16速度静态状态17速度阈值状态18转矩阈值状态19转矩限制状态20速度限制状态21位置锁定状态22电量限制状态23保留24低速度阈值状态25高速度阈值状态26驱动器状态AXIS_SERVO_DRIVEDINT标签用于以一个 32 位字访问所有驱动器状态位。该标签与驱动器状态位属性相同。标签位伺服动作状态0驱动器使能状态1关闭状态2过程状态3母线就绪状态4保留5归零输入状态6记录 1 输入状态7记录 2 输入状态8正向超程输入状态9负向超程输入状态10使能输入状态11加速度限制状态12绝对参考状态13保留14保留15速度锁定状态16速度静态状态17速度阈值状态18转矩阈值状态19转矩限制状态20速度限制状态21位置锁定状态22电量限制状态23保留24低速度阈值状态25高速度阈值状态26驱动器热故障动作AXIS_SERVO_DRIVESINTGSVSSV故障动作关闭禁用驱动器停止运动仅状态值0123驱动器欠电压故障AXIS_SERVO_DRIVEBOOL标签当驱动器直流母线电压低于该母线的预定义工作电压限制值时,该位置位。驱动器单位AXIS_SERVO_DRIVEINTGSV“驱动器单位”属性用于指定“驱动器分辨率”属性值的计量单位。枚举表中的单位可以是线性/旋转、英制/公制。枚举表中还对此进行了进一步的区分,指定驱动器单位是直接基于电机还是外部或辅助反馈。0 = 电机单位转1 = 辅助设备转数2 = 电机英寸3 = 辅助设备英寸4 = 电机 mm5 = 辅助设备 mm驱动器警告位AXIS_SERVO_DRIVEDINTGSV警告位驱动器过载警告0驱动器过热警告1电机过热警告2冷却错误警告3驱动器过载警告当超出电机负载限制时,“过载警告”位置位。如果该情况持续存在,将产生过载故障。该警告位使控制程序能够减小电机负载,以免出现关机的情况。驱动器过热警告当超出驱动器的过热限制时,驱动器过热警告位置位。如果该情况持续存在,将产生驱动器过热故障。该警告位使控制程序能够减小电机负载或加强驱动器冷却效果,以免出现关机的情况。电机过热警告当超出电机的过热限制时,电机过热警告位置位。如果该情况持续存在,将产生电机过热故障。该警告位使控制程序能够减小电机负载或加强电机冷却效果,以免出现关机的情况。冷却错误警告当超出驱动器外壳内的环境温度限制时,冷却错误警告位置位。如果该情况持续存在,将产生冷却错误故障。该警告位使控制程序能够加强驱动器冷却效果,以免出现关机的情况。动力学配置位AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTGSVSSV版本 16 改进了控制器对 S 曲线轨迹变化的处理方式。您是否希望恢复版本 15 或之前版本对 S 曲线的处理行为?否 - 保持这些位置位(默认)。是 - 将这些位中的一个或多个位清零:要关闭此项变更将以下位清零减小 S 曲线停机延时此变更适用于“运动轴停止”(MAS) 指令。借助此项变更,可以通过提高减速急动度来使加速轴更快速地停止。如果停止指令的减速急动度超过当前加速急动度,控制器将使用该减速急动度。0减少 S 曲线速度反转在版本 16 之前,如果在轴减速时降低减速急动度,则可能导致轴运动方向瞬间反转。如果在轴逐步停止期间尝试以更低减速度重新启动点动或移动运动,则通常会发生这种情况。此项变更可防止在这种情况下发生轴运动方向的反转。1减小 S 曲线速度超调量如果在轴加速时减小加速急动度,可能导致轴超过其设定速度。此项变更可使超调量不超过设定速度的 50%。2
若在轴运动时,根据轴的当前位置执行运动计算和增量运动,给定位置非常有用。使用给定位置(而非实际位置)可避免执行计算时因轴位置误差而引入累积误差。给定速度AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSV标签重要提示: 要使用此属性,请确保运动组的“自动标签更新”功能已启用(默认设置)。否则,当轴运行时,将不会显示正确的值。若在轴运动时,根据轴的当前位置执行运动计算和增量运动,给定位置非常有用。使用给定位置(而非实际位置)可避免执行计算时因轴位置误差而引入累积误差。公共母线故障AXIS_SERVO_DRIVEBOOL标签如果将驱动器配置为公共母线从设备模式,而又为其提供三相电源,则驱动器将关闭。如果发生此类情况,该位将置位。通信故障AXIS_SERVO_DRIVEDINTBOOL当驱动器轴的相关换向反馈源出现问题,导致该驱动器无法接收正确或可靠的电机轴信息以执行换向时,该位置位。配置故障AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签未成功更新相关运动控制模块的轴配置属性时置位。有关配置故障的具体信息,请参见与运动控制模块相关的“属性错误代码”和“属性错误 ID”属性。是否希望在出现该故障时向控制器指示严重故障?是 - 将运动组的“常见故障类型”设为严重故障。否 - 必须编写代码处理这些故障。正在更新配置AXIS_CONSUMEDAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签使用 SSV 指令更改某个属性后,控制器会将更改内容发送到运动控制模块。如果希望等待更改完成,应监视轴的 ConfigUpdateInProcess 位。如果该位为:ON — 控制器正在更改属性。OFF — 更改完毕。连续转矩限制AXIS_SERVO_DRIVEREALGSVSSV额定值的百分比“转矩限制”属性可用于控制由驱动器的电机热模型施加的连续转矩限制。增大“连续转矩限制”值可使最大允许连续电机转矩随之增大,当达到该最大允许值后,驱动器会将电机电流折返或者声明出现电机热故障。对于配备了特殊冷却设备的电机,“连续转矩限制”值可位置为大于 100% 额定值,以便电机提供更高的连续转矩输出。对于在较高环境温度条件下运行的电机,“连续转矩限制”可配置为小于 100% 额定转矩,以防电机过热。“连续转矩限制”值用于指定驱动器可连续或基于 RMS 而给定的电机额定电流的最大百分比。例如,如果连续转矩限制为 150%,则送入电机的连续电流将限定在电机额定连续电流值的 1.5 倍。控制同步故障AXIS_CONSUMEDAXIS_SERVOAXIS_SERVO_DRIVEBOOL标签如果该位置位,表明控制器与运动控制模块之间的通信中断,连续错过多个位置更新。控制器最多可错过 4 个位置更新。之后,“控制同步故障”位置位。运动控制模块可能随后会出现故障,或者可能已经出现故障。对于消费型轴,该位表示与生产型控制器之间的通信中断。当重新建立通信后,此位清零。由变换控制状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签如果该位为:ON — 变换正在使轴运动。OFF — 变换未使轴运动。转换常数AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALREALGSVSSV计数/位置单位范围 = 0.1 - 1e12默认值 = 8000.0要以“位置单位”字符串属性所指定的位置单位显示轴位置并进行运动控制编程,必须为每个轴确定一个转换常数。通过转换常数(有时称为 K 常数),可将轴对象的单位在轴位置单位与反馈计数之间进行转换。具体而言,K 代表每个位置单位的反馈计数值。请注意,基于 1756M02AE 编码器的伺服模块使用 4 倍编码器反馈解码(对通道 A 和 B 的两个边沿计数)。计数方向由边沿方向和对侧通道的状态决定。通道 A 引导通道 B 时,增加计数。这是增量式编码器最常用的解码模式,因为此时的分辨率最高。例如,假设该伺服轴使用直接与 5 螺距滑动丝杠耦合的电机中的 1000 线编码器(每英寸 5 转)。此时使用用户定义的英寸位置单位,按如下方式计算转换常数:K = 1000 线/转 * 4 计数/线 * 5 转/英寸 = 20,000 计数/英寸。重要提示: 如果更改了转换常数,则“说明”列中带有“位置单位”转换的所有可配置属性都将无效。要想这些属性有效,必须在设置任何受影响的属性(包括使用默认值)之前,将“转换常数”设置为所需的值。协调运动状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签如果当前针对轴激活任何协调运动曲线,则该位置位。协调运动完成或停止后,该位即清零。阻尼系数AXIS_SERVOAXIS_SERVO_DRIVEREALGSVSSV“阻尼系数”属性值用于在执行 MRAT(运动运行轴调谐)指令期间计算“最大位置伺服带宽”(参见下文)。通常,“阻尼系数”属性控制着伺服轴的动态响应。当使用较小的阻尼系数(例如 0.7)调谐增益时,对轴执行阶跃响应测试时,可能产生速度过冲的欠阻尼行为。使用较大的阻尼系数(例如 1.0)时,生成的增益集将产生无过冲的系统阶跃响应,但该响应的伺服带宽将显著减小。“阻尼系数”的默认值为 0.8,能够适用于大多数应用。直流母线电压AXIS_SERVO_DRIVEDINTGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。伏特该参数为驱动器直流母线上的当前电压。减速状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签轴当前在指令的作用下减速时置位。“加速状态”位和“减速状态”位用于查看轴正否正在加速或减速。如果这两个位均处于清零状态,说明轴正以稳定速度运动或保持静止。Direct Drive斜坡速率AXIS_SERVOREALGSVSSV伏特/秒“Direct Drive斜坡速率”属性是指在执行“Direct Drive开启”(MDO) 指令时用来改变输出电压的电压转换速率。Direct Drive斜坡速率为 0 时,将禁用输出斜坡速率限制器,允许直接施加Direct Drive开电压。方向变换比AXIS_SERVOREALGSVSSV某些情况下,外部驱动器致动器的速度变换可能与方向相关。这种非线性在液压应用中至关重要。为补偿这种行为,可基于伺服输出的符号将“方向变换比”属性应用于“速度变换”属性。具体而言,当伺服输出的符号为正时,“速度变换”属性值需经“方向变换比”进行变换。因此,“方向变换比”是正方向(正伺服输出)“速度变换”值与负方向(负伺服输出)“速度变换”值之比。先后在正方向和负方向上运行自动调谐过程,并计算所得速度/转矩变换值的比率,即可确定出“方向变换比”的经验值。驱动器轴 IDAXIS_SERVO_DRIVEINTGSV驱动器放大器的产品代码“驱动器 ID”属性包含与轴相关的驱动器放大器的 CIP 产品代码。如果该产品代码与实际驱动器放大器的代码不匹配,在配置过程中将产生错误。驱动器容量AXIS_SERVO_DRIVEREALGSV标签重要提示: 若要使用此属性,请将其选作轴的“实时轴信息”属性之一。否则,当轴运行时,将不会显示正确的值。请参见“轴信息选项 1”。驱动器容量的当前利用率,以额定容量百分比的形式表示。驱动器控制电压故障AXIS_SERVO_DRIVEBOOL标签当驱动器电路的相关电源电压下降至超出可接受限制范围时,该位置位。驱动器冷却故障AXIS_SERVO_DRIVEBOOL标签当驱动器控制电路的环境温度超出驱动器关机环境温度时,该位置位。驱动器使能输入故障AXIS_SERVO_DRIVEBOOL标签如果发生以下两种可能情况之一,则将声明出现该故障:1) 尝试在驱动器使能输入未激活时启用轴(通常通过 MSO 或 MAH 指令)。2) 在轴处于使能状态下,驱动器使能输入从激活状态跳变为非激活状态。只有在“故障配置位”属性中的“驱动器使能输入故障处理”位置位时,才会发生此故障。如果“驱动器使能输入故障动作”设置为“停止命令”,并且轴因“驱动器使能输入故障”而停止,则在故障清除前,故障轴无法移动。如果尝试使用运动指令使处于故障状态的轴运动,会导致指令错误。小贴士: 如果将“驱动器使能故障动作”设置为“仅状态”或“停止命令”,并尝试在驱动器使能输入处于激活状态时启用轴(通常通过 MSO 或 MAH 指令),则轴会在故障状态下启用,指示出现驱动器使能输入故障。将“驱动器使能故障动作”设置为“停止命令”时,用于启用轴并发起运动的指令 (MAH, MRAT, MAHD) 将中止运动过程,同时将指令的 IP 和 PC 位清零。该故障条件会锁定,并需要执行显式 MAFR(运动轴故障复位)或 MASR(运动轴关闭复位)指令方可清零。在驱动器使能输入仍处于非激活状态且驱动器处于使能状态时,任何操作均无法清除故障。但如果驱动器被禁用,在驱动器使能输入未激活的情况下可以清除驱动器使能输入故障。如果“驱动器使能输入检查”位清零,则驱动器使能输入的状态无关紧要,此时在上述任何情况下都不会声明发生故障。驱动器使能输入故障动作AXIS_SERVO_DRIVESINTGSVSSV故障动作关闭禁用驱动器停止运动仅状态值0123驱动器使能状态AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALBOOL标签AXIS_SERVO如果该位为:ON — 轴的驱动器使能输出接通。OFF — 轴的驱动器使能输出关闭。AXIS_SERVO_DRIVE如果该位为:ON — 驱动器的功率组件激活。OFF — 驱动器的功率组件未激活。驱动器故障AXIS_SERVOBOOL标签如果该位置位,表明外部伺服驱动器检测到故障并通过驱动器故障输入将该故障通知给伺服模块。该故障条件会锁定,并需要执行显式 MAFR(运动轴故障复位)或 MASR(运动轴关闭复位)指令方可清零。驱动器故障AXIS_SERVO_DRIVEDINT标签用于以一个 32 位字访问所有驱动器故障位。该标签与驱动器故障位属性相同。标签位正向软超程故障0负向软超程故障1正向硬超程故障2负向硬超程故障3电机反馈故障4电机反馈噪声故障5辅助反馈故障6辅助反馈噪声故障7保留8驱动器使能输入故障9公共母线故障10预充电过载故障11保留12接地短路故障13驱动器硬件故障14超速故障15过载故障16驱动器过热故障17电机过热故障18驱动器冷却故障19驱动器冷却电压故障20反馈故障21通信故障22驱动器过电流故障23驱动器过压故障24驱动器欠电压故障25电源缺相故障26位置误差故障27SERCOS 故障28超程故障29保留30制造商专有故障31是否希望在出现上述任一故障时向控制器指示严重故障?是 - 将运动组的“常见故障类型”设为严重故障。否 - 必须编写代码处理这些故障。驱动器故障动作AXIS_SERVOSINTGSVSSV故障动作关闭禁用驱动器停止运动仅状态值0123驱动器故障位AXIS_SERVO_DRIVEDINTGSV用于以一个 32 位字访问所有驱动器故障位。该属性与驱动器故障标签相同。标签位正向软超程故障0负向软超程故障1正向硬超程故障2负向硬超程故障3电机反馈故障4电机反馈噪声故障5辅助反馈故障6辅助反馈噪声故障7保留8驱动器使能输入故障9公共母线故障10预充电过载故障11保留12接地短路故障13驱动器硬件故障14超速故障15过载故障16驱动器过热故障17电机过热故障18驱动器冷却故障19驱动器冷却电压故障20反馈故障21通信故障22驱动器过电流故障23驱动器过压故障24驱动器欠电压故障25电源缺相故障26位置误差故障27SERCOS 故障28超程故障29保留30制造商专有故障31是否希望在出现上述任一故障时向控制器指示严重故障?是 - 将运动组的“常见故障类型”设为严重故障。否 - 必须编写代码处理这些故障。驱动器故障输入状态AXIS_SERVOBOOL标签用于指示是否存在故障的驱动器数字输出。如果该位为:ON — 驱动器存在故障。OFF — 驱动器不存在故障。驱动器硬件故障AXIS_SERVO_DRIVEBOOL标签驱动器检测到严重硬件故障时,该位置位。驱动器模型时间常数AXIS_SERVOAXIS_SERVO_DRIVEREALGSV SSV秒“驱动器模型时间常数”值表示驱动器电流环的集总模型时间常数,MRAT 指令将使用该常数计算最大速度和位置伺服带宽值。驱动器模型时间常数是驱动器电流环时间常数、反馈采样周期及与速度反馈滤波器相关的时间常数之和。在配置轴时,该值被设置为默认值。轴类型详细信息AXIS_SERVO只有当轴配置为外部转矩伺服驱动器时,该值才由 MRAT 使用。AXIS_SERVO_DRIVE由于速度反馈滤波器的带宽取决于反馈设备的分辨率,所以采用高分辨率反馈设备时,驱动器模型时间常数值更小。驱动器过电流故障AXIS_SERVO_DRIVEBOOL标签当驱动器输出电流超出驱动器的预定义工作电流限制值时,该位置位。驱动器过热故障AXIS_SERVO_DRIVEBOOL标签当驱动器温度超过驱动器关机温度时,该位置位。驱动器过压故障AXIS_SERVO_DRIVEBOOL标签当驱动器直流母线电压超出该母线的预定义工作电压限制值时,该位置位。驱动器极性AXIS_SERVO_DRIVEDINTGSVSSV0 = 自定义极性1 = 正极性2 = 负极性自定义极性“自定义极性”用于支持使用 SERCOS 接口标准定义的各种极性参数自定义极性配置。正/负极性“正极性”和“负极性”位属性决定着驱动器伺服环的总体极性。所有高级极性参数均根据驱动器极性的正负来自动设置。正确接线可确保伺服环是闭合的负反馈系统。但对于给定应用,不能保证伺服驱动器的正方向与用户的正方向相同。“负极性”将反转伺服驱动器给定位置和实际位置数据的极性。因此,通过选择正或负驱动器极性,可以将驱动器的正方向配置为与用户的正方向一致。使用 MRHD 和 MAHD 运动指令可自动配置该属性。驱动器分辨率AXIS_SERVO_DRIVEDINTGSV驱动器计数/驱动器单位“驱动器分辨率”属性决定着每个驱动器单位所对应的驱动器计数。根据具体的驱动器应用,驱动器单位可配置为转、英寸或毫米。此外,配置的驱动器单位可应用于电机或辅助反馈设备。所有位置、速度和加速数据在输入驱动器之前,均基于驱动器分辨率和转换常数由用户的位置单位变换为驱动器单位。转换常数与驱动器分辨率之比决定着每个驱动器单位对应的位置单位数。转换常数/驱动器分辨率 = 驱动器单位(转、英寸或毫米)/位置单位相反,所有来自驱动器的位置、速度和加速数据均基于驱动器分辨率和转换常数由用户的位置单位变换为驱动器单位。驱动器分辨率与转换常数之比决定着每个驱动器单位对应的位置单位数。驱动器分辨率/转换常数 = 位置单位/驱动器单位(转、英寸或毫米)通常,无论驱动器所用反馈设备的分辨率如何,“驱动器分辨率”值可始终为默认值:200000 驱动器计数/驱动器单位。这是因为驱动器本身有一组变换系数,用于将反馈计数与驱动器计数相关联。驱动器行程范围限值由于根据 SERCOS 接口标准,驱动器位置参数最终受到有符号 32 位表示形式的限制,因此驱动器分辨率参数会影响驱动器的行程范围。根据驱动器分辨率确定最大行程范围的公式如下:驱动器行程范围限值 = +/- 2,147,483,647/驱动器分辨率。每驱动器单位默认对应 200,000 驱动器计数,因此驱动器的范围限值为 10,737 个驱动器单位。尽管这一行程范围限值引发问题的情况相对很少,但通过降低驱动器分辨率可以轻松地增大行程范围。这样做的缺点是,位置数据会以较低的分辨率传递,这可能会影响运动的平滑度。小数归位但在某些情况下,用户可能还应专门配置运动分辨率值来处理小数归位应用或多转绝对式应用(要求循环补偿)。这些情况下,旋转应用程序的归位值并非整数值,则“旋转位置变换”属性可能会修正为可被归位值整除的值。以下示例解释了如何配合使用“驱动器分辨率”值和“转换常数”来处理不同的应用。旋转齿轮头(无辅助反馈设备)根据旋转电机选型,驱动器分辨率表示为驱动器计数/电机每转,并应用于旋转位置分辨率 IDN。用户将转换常数设置为驱动器计数/用户定义位置单位。对于 3:1 变速箱,如果用户位置单位为齿轮输出轴转数,则转换常数为 200,000/3,这是不合理的!但在这种情况下,可以将驱动器分辨率设置为 300,000 驱动器计数/电机每转,然后将转换常数设置为 100,000 驱动器计数/输出轴每转。该系统可以在不损失任何机械精度的情况下使用该配置,也就是说,每整转的输出轴运动将使输出轴恰好移动 1 转。线性滚珠丝杠(无辅助反馈设备)根据旋转电机选型,驱动器分辨率表示为驱动器计数/电机每转,并应用于旋转位置分辨率 IDN。用户将转换常数设置为驱动器计数/用户定义位置单位。对于 5 毫米螺距的滚珠丝杠,如果用户位置单位为毫米,则用户可将转换常数设置为 200,000/5 或 40,000 驱动器计数/毫米(默认驱动器分辨率值为 200,000 驱动器计数/电机每转)。如果螺距不合理,解决这个问题的方法与“旋转齿轮头(无辅助反馈设备)”中所述的方法相同。旋转齿轮头(带辅助反馈设备)根据旋转电机选型,驱动器分辨率表示为驱动器计数/辅助设备每转,并应用于旋转位置分辨率 IDN。根据伺服环配置,位置以辅助反馈设备为基础,因此各变换类型的“数据参考”位应为“参考负载”而非“参考电机”。电机反馈为旋转式,分辨率以周期数/电机每转表示。辅助反馈设备同样为旋转式,分辨率以周期数/辅助设备每转表示。辅助反馈比设置为辅助反馈转数/电机每转,并在内部应用到 IDN 121 和 122,用于在双伺服环配置中将位置伺服环计数与速度伺服环计数建立关联。“辅助反馈比”属性还用于在配置过程中根据所选电机的规范计算范围限值和默认值。对于 3:1 变速箱,如果用户位置单位为齿轮箱输出轴转数,则转换常数仍合理,因为此时的变换设置为“参考负载”!用户可基于 200,000 驱动器计数/辅助设备每转的默认驱动器分辨率值将转换常数设置为 200,000 驱动器计数/输出轴每转。该系统可以在不损失任何机械精度的情况下使用该配置,也就是说,每整转的输出轴运动将使输出轴恰好移动 1 转。线性滚珠丝杠/滚珠丝杠组合(带辅助反馈设备)根据线性辅助设备反馈选型,驱动器分辨率以驱动器计数/线性单位表示(例如毫米,公制位选择),并应用于线性位置数据变换 IDN。根据伺服环配置,位置以辅助反馈设备为基础,因此各变换类型的“数据参考”位同样应为“参考负载”而非“参考电机”。电机反馈为旋转式,分辨率以周期数/电机每转表示。辅助反馈设备为线性,分辨率以周期数/毫米表示。辅助反馈比设置为辅助反馈单位数/电机每转,并在内部应用到 IDN 123,用于在双伺服环配置中将位置伺服环计数与速度伺服环计数建立关联。“辅助反馈比”属性还用于在配置过程中根据所选电机的规范计算范围限值和默认值。如果在应用中使用 3:1 变速箱和 5 毫米螺距的滚珠丝杠,并且用户的位置单位为厘米,转换常数依然合理,因为选择了“参考负载”!用户可根据 200000 驱动器计数/毫米的默认驱动器分辨率值将转换常数设置为 20,000 驱动器计数/厘米。该系统可以在不损失任何机械精度的情况下使用该配置,也就是说,10 厘米的移动将使致动器恰好移动 10 厘米。驱动器变换位AXIS_SERVO_DRIVEDINTGSV“驱动器变换位”属性配置直接源自“驱动器单位”属性。位0 = 变换类型0 - 标准1 - 自定义1 = 变换单位0 - 旋转1 - 线性2 = 线性变换单位0 - 公制1 - 英制3 = 数据参考0 - 电机1 - 负载变换类型“变换类型”位属性用于允许按 SERCOS 接口标准定义的位置、速度、加速度和转矩变换参数实现自定义变换。当该位清零(默认)时,将完全根据首选的Rockwell AutomationSERCOS 驱动器变换系数对这些变换参数进行设置。目前,Logix 不支持自定义变换。变换单位“变换单位”属性用于确定控制器是否根据旋转或线性变换参数及由 SERCOS 接口标准定义的关联驱动器单位来变换位置、速度和加速度属性。当该位清零(默认)时,SERCOS 位置数据变换、速度数据变换和加速度数据变换参数中的相应位也随之清零,指示驱动器使用旋转变换参数。当该位置位时,SERCOS 位置数据变换、速度数据变换和加速度数据变换参数中的相应位也随之置位,指示驱动器使用线性变换参数。线性变换单位“变换单位”设置为线性时,“线性变换”位属性用来确定控制器是根据 SERCOS 接口标准定义的公制还是英制驱动器单位来变换位置、速度和加速度属性。当该位清零(默认)时,SERCOS 位置数据变换、速度数据变换和加速度数据变换参数中的相应位也随之清零,指示驱动器使用公制变换参数。当该位置位时,SERCOS 位置数据变换、速度数据变换和加速度数据变换参数中的相应位也随之置位,指示驱动器使用英制单位进行变换。如果变换单位设置为旋转,则线性变换单位不起作用。下表列出了在与 Rockwell SERCOS 驱动器产品对接时标准驱动器单位与变换单位和线性变换单位位选择的对应关系。标准驱动器单位公制英语 (English)旋转转转线性毫米英寸数据参考“数据参考”位用于确定位置、速度、加速度和转矩数据以机械传动的哪一侧为参考。如果选择电机,则位置、速度、加速度和转矩数据以传动的电机侧为参考。如果选择负载,则位置、速度、加速度和转矩数据以传动的负载侧为参考。上述结论仅适用于使用辅助反馈设备的情况。驱动器状态位AXIS_SERVO_DRIVEDINTGSV标签用于以一个 32 位字访问所有驱动器状态位。该属性与驱动器状态标签相同。标签位伺服动作状态0驱动器使能状态1关闭状态2过程状态3母线就绪状态4保留5归零输入状态6记录 1 输入状态7记录 2 输入状态8正向超程输入状态9负向超程输入状态10使能输入状态11加速度限制状态12绝对参考状态13安全中断模式激活状态(需要使用驱动器固件 1.85 或更高版本)14保留14保留15速度锁定状态16速度静态状态17速度阈值状态18转矩阈值状态19转矩限制状态20速度限制状态21位置锁定状态22电量限制状态23保留24低速度阈值状态25高速度阈值状态26驱动器状态AXIS_SERVO_DRIVEDINT标签用于以一个 32 位字访问所有驱动器状态位。该标签与驱动器状态位属性相同。标签位伺服动作状态0驱动器使能状态1关闭状态2过程状态3母线就绪状态4保留5归零输入状态6记录 1 输入状态7记录 2 输入状态8正向超程输入状态9负向超程输入状态10使能输入状态11加速度限制状态12绝对参考状态13保留14保留15速度锁定状态16速度静态状态17速度阈值状态18转矩阈值状态19转矩限制状态20速度限制状态21位置锁定状态22电量限制状态23保留24低速度阈值状态25高速度阈值状态26驱动器热故障动作AXIS_SERVO_DRIVESINTGSVSSV故障动作关闭禁用驱动器停止运动仅状态值0123驱动器欠电压故障AXIS_SERVO_DRIVEBOOL标签当驱动器直流母线电压低于该母线的预定义工作电压限制值时,该位置位。驱动器单位AXIS_SERVO_DRIVEINTGSV“驱动器单位”属性用于指定“驱动器分辨率”属性值的计量单位。枚举表中的单位可以是线性/旋转、英制/公制。枚举表中还对此进行了进一步的区分,指定驱动器单位是直接基于电机还是外部或辅助反馈。0 = 电机单位转1 = 辅助设备转数2 = 电机英寸3 = 辅助设备英寸4 = 电机 mm5 = 辅助设备 mm驱动器警告位AXIS_SERVO_DRIVEDINTGSV警告位驱动器过载警告0驱动器过热警告1电机过热警告2冷却错误警告3驱动器过载警告当超出电机负载限制时,“过载警告”位置位。如果该情况持续存在,将产生过载故障。该警告位使控制程序能够减小电机负载,以免出现关机的情况。驱动器过热警告当超出驱动器的过热限制时,驱动器过热警告位置位。如果该情况持续存在,将产生驱动器过热故障。该警告位使控制程序能够减小电机负载或加强驱动器冷却效果,以免出现关机的情况。电机过热警告当超出电机的过热限制时,电机过热警告位置位。如果该情况持续存在,将产生电机过热故障。该警告位使控制程序能够减小电机负载或加强电机冷却效果,以免出现关机的情况。冷却错误警告当超出驱动器外壳内的环境温度限制时,冷却错误警告位置位。如果该情况持续存在,将产生冷却错误故障。该警告位使控制程序能够加强驱动器冷却效果,以免出现关机的情况。动力学配置位AXIS_CONSUMEDAXIS_GENERICAXIS_SERVOAXIS_SERVO_DRIVEAXIS_VIRTUALDINTGSVSSV版本 16 改进了控制器对 S 曲线轨迹变化的处理方式。您是否希望恢复版本 15 或之前版本对 S 曲线的处理行为?否 - 保持这些位置位(默认)。是 - 将这些位中的一个或多个位清零:要关闭此项变更将以下位清零减小 S 曲线停机延时此变更适用于“运动轴停止”(MAS) 指令。借助此项变更,可以通过提高减速急动度来使加速轴更快速地停止。如果停止指令的减速急动度超过当前加速急动度,控制器将使用该减速急动度。0减少 S 曲线速度反转在版本 16 之前,如果在轴减速时降低减速急动度,则可能导致轴运动方向瞬间反转。如果在轴逐步停止期间尝试以更低减速度重新启动点动或移动运动,则通常会发生这种情况。此项变更可防止在这种情况下发生轴运动方向的反转。1减小 S 曲线速度超调量如果在轴加速时减小加速急动度,可能导致轴超过其设定速度。此项变更可使超调量不超过设定速度的 50%。2
提供反馈