IPIDCONTROLLER(比例-积分-微分控制器)
配置和控制用于比例积分微分 (PID) 逻辑的输入和输出。PID 逻辑通过使用为所需设定点和测量过程变量之间的差异计算错误值的过程循环,用来控制诸如温度、压力、液面、级别或流速等物理属性。控制器尝试通过调整控制变量最小化随时间出现的错误。计算包括使用的比例 (P)、积分 (I) 和微分 (D) 项,如下所示︰
- P:错误的当前值。
- I:错误的上一个值。
- D:错误的可能未来值,基于其当前更改速率。使用过程循环控制诸如温度、压力、液面或流速等物理属性。
支持的语言︰功能块图、梯形图和结构化文本。
该指令适用于 Micro810、L20E、L50E 和 L70E 控制器。
IPIDCONTROLLER
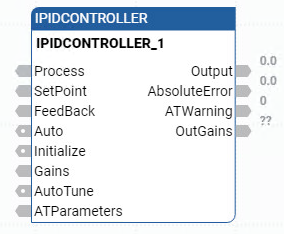
参数 | 参数类型 | 数据类型 | 描述 |
|---|---|---|---|
EN | 输入 | BOOL | 当为 TRUE 时,启用指令块。
适用于梯形图程序。 |
Process | 输入 | REAL | 流程值,是根据流程输出测量到的值。 |
SetPoint | 输入 | REAL | 设置点。 |
FeedBack | 输入 | REAL | 反馈信号,是应用于流程的控制变量的值。 例如,反馈可以为 IPIDCONTROLLER 输出。 |
Auto | 输入 | BOOL | PID 控制器的操作模式:
|
Initialize | 输入 | BOOL | 值的更改 (TRUE 更改为 FALSE 或 FALSE 更改为 TRUE) 导致在该循环期间控制器消除任何比例增益。同时还会初始化 AutoTune 序列。 |
AutoTune | 输入 | BOOL |
|
Output | 输出 | REAL | 来自控制器的输出值。 |
AbsoluteError | 输出 | REAL | 来自控制器的绝对错误 (Process – SetPoint)。 |
ATWarnings | 输出 | DINT | (ATWarning) 自动调节序列的警告。可能的值有:
|
OutGains | 输出 | GAIN_PID | 在 AutoTune 序列之后计算的增益。 使用 GAIN_PID 数据类型定义 OutGains 输出。 |
ENO | 输出 | BOOL | 启用“输出”。 适用于梯形图程序。 |
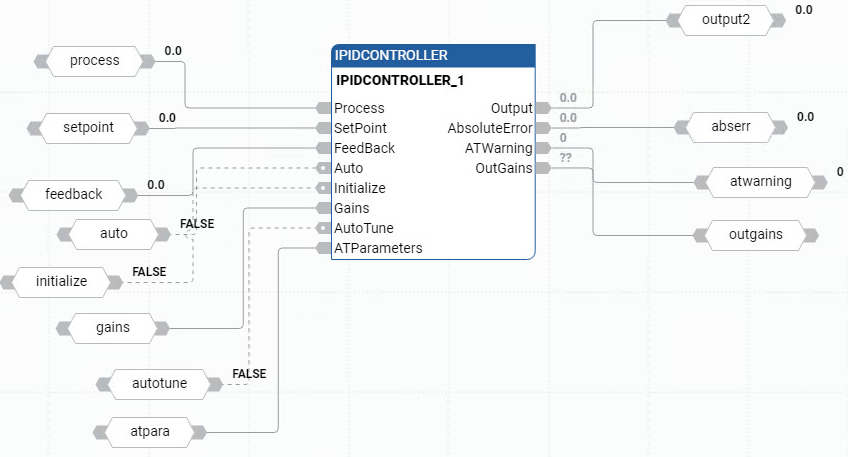
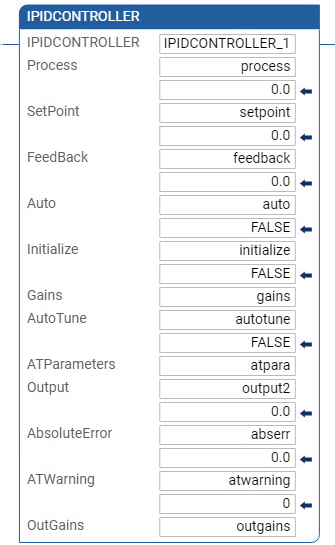
IPIDCONTROLLER 示例
IPIDCONTROLLER 功能块图示例
IPIDCONTROLLER 梯形图示例
IPIDCONTROLLER 结构化文本示例
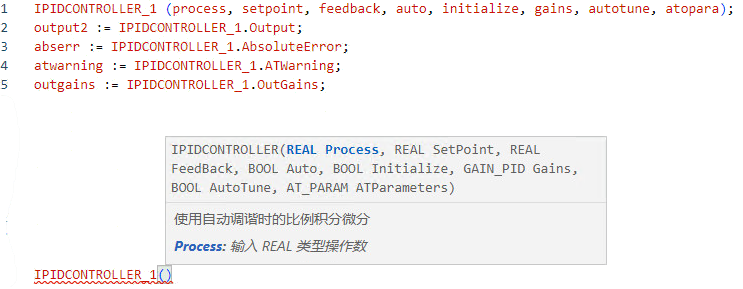
(* ST equivalence: IPIDController1 is an instance of IPIDController block *) IPIDController1(Proc, SP, FBK, Auto, Init, G_In, A_Tune, A_TunePar, Err ); Out_process := IPIDController1.Output ; A_Tune_Warn := IPIDController1.ATWarning ; Gain_Out := IPIDController1.OutGains ;
结果

提供反馈