MC_Reset(运动控制复位)
MC_Reset 指令可通过复位所有内部轴相关错误将轴状态从“错误停止”转换为“静止”。功能块实例的输出不会改变。
操作详细信息︰
- 如果在执行 MC_Reset 后轴报警状态保持不变,则执行 MC_Power,然后执行 MC_Reset。
- MC_Reset 仅将轴状态从“错误停止”复位为“静止”。当轴处于其他状态(包括“已禁用”)时执行 MC_Reset 会导致出现错误,但对正在进行的运动或轴的状态没有影响。
支持的语言︰功能块图、梯形图和结构化文本。
该指令适用于支持运动控制的 L50E 和 L70E 控制器。
MC_Reset
参数 | 参数类型 | 数据类型 | 描述 |
|---|---|---|---|
EN | 输入 | BOOL | 启用指令块。
仅适用于梯形图程序。 |
AxisIn | 输入 | AXIS_REF FB_AXIS_REF | 使用 AXIS_REF 数据类型定义 AxisIn。 对于 FB_Axis(反馈轴),使用 FB_AXIS_REF 数据类型定义 AxisIn。 |
Execute | 输入 | BOOL | TRUE: 将轴复位为上升沿。 |
ENO | 输出 | BOOL | 启用“输出”。 仅适用于梯形图程序。 |
Axis | 输出 | AXIS_REF | 梯形图编程中的轴输出为只读。 |
Done | 输出 | BOOL | TRUE: 轴状态为“静止” 或“已禁用”。 |
Busy | 输出 | BOOL | TRUE: 功能块未完成。 |
Error | 输出 | BOOL | 指示发生了错误。
|
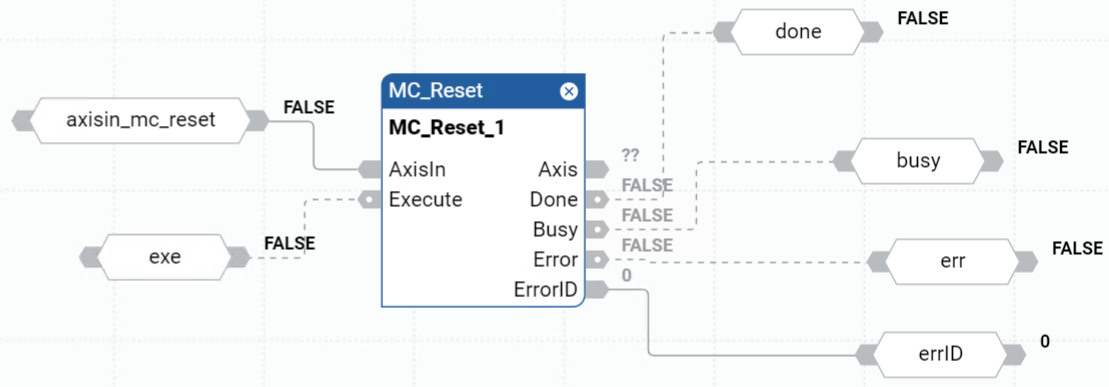
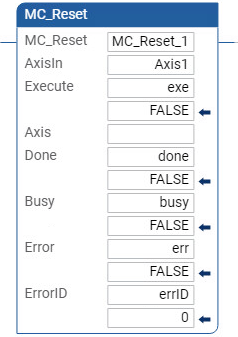
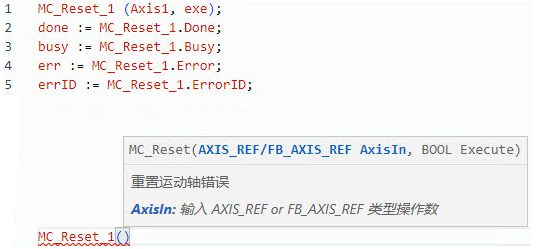
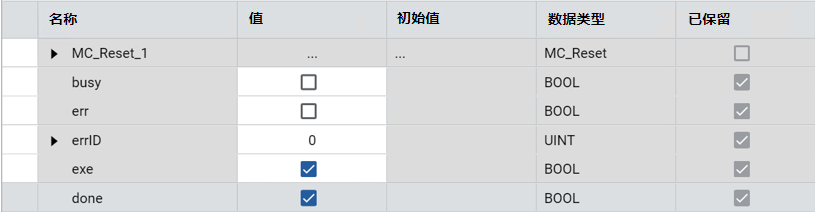
MC_Reset 示例
MC_Reset 功能块图示例
MC_Reset 梯形图示例
MC_Reset 结构化文本示例
结果
提供反馈