MC_ReadActualVelocity(运动控制读取实际速度)
MC_ReadActualVelocity 指令可返回反馈轴的实际速度值。
MC_ReadActualVelocity 功能仅适用于反馈运动。
执行 MC_ReadActualVelocity 之前,确认轴是否处于以下轴状态之一:
- 静止
- 离散运动
- 错误停止
支持的语言︰功能块图、梯形图和结构化文本。
该指令适用于支持运动控制的 L50E 和 L70E 控制器。
MC_ReadActualVelocity
参数 | 参数类型 | 数据类型 | 描述 |
|---|---|---|---|
AxisIn | 输入 | FB_AXIS_REF | 对于 FB_Axis(反馈轴),使用 FB_AXIS_REF 数据类型定义 AxisIn。 |
Enable | 输入 | BOOL |
|
Valid | 输出 | BOOL |
|
Busy | 输出 | BOOL |
|
Error | 输出 | BOOL | 指示发生了错误。
|
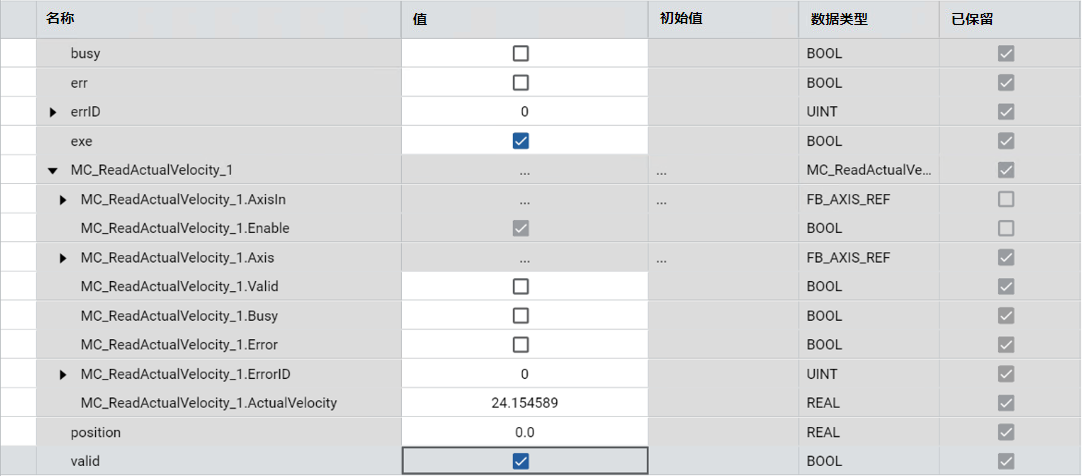
ActualVelocity | 输出 | REAL | 反馈运动轴的实际速度值(以 [u/s] 为轴单位)。 ActualVelocity 是带符号的值,其中包括方向信息。 |
MC_ReadActualVelocity 示例
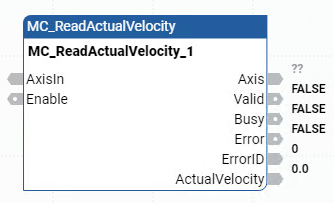
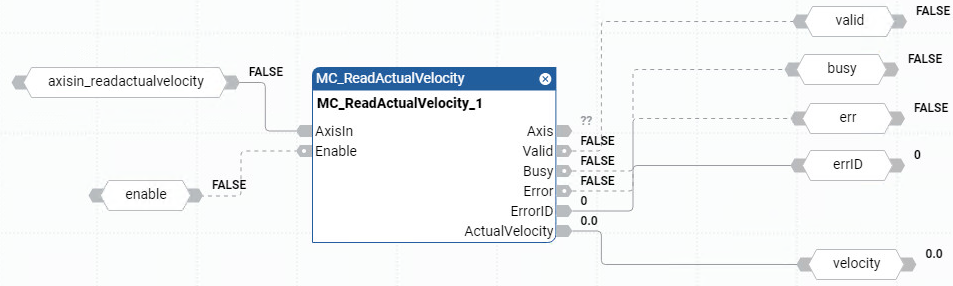
MC_ReadActualVelocity 功能块图示例
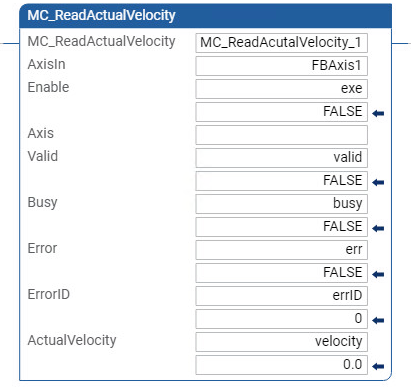
MC_ReadActualVelocity 梯形图示例
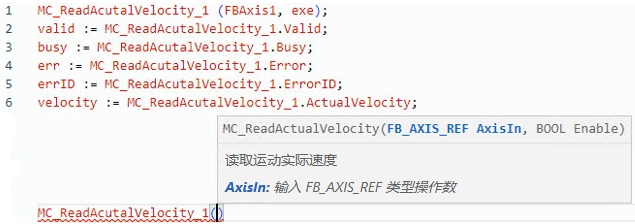
MC_ReadActualVelocity 结构化文本示例
结果

提供反馈