MC_MoveAbsolute(运动控制移动绝对值)
MC_MoveAbsolute 指令可命令受控制的运动到指定的绝对位置。
操作详细信息︰
- 对于Micro800控制器
- 由于运动方向是由当前位置和目标位置决定的,因此会忽略 MC_MoveAbsolute 功能块的输入速度符号。
- 由于仅有一个数学解答能到达目标位置,因此会忽略 MC_MoveAbsolute 功能块的输入方向。
- 如果在Micro800控制器轴的状态为“静止”且移动相对距离为零时发布 MC_MoveAbsolute 功能块,则对功能块的执行将直接报告为 Done。
- 如果将 MC_MoveAbsolute 功能块发布到非 Homed 位置的轴,则该功能块将报告错误。
- 如果未被其他功能块覆盖,则 MoveAbsolute 功能块会以零速度完成。
支持的语言︰功能块图、梯形图和结构化文本。
该指令适用于支持运动控制的 L50E 和 L70E 控制器。
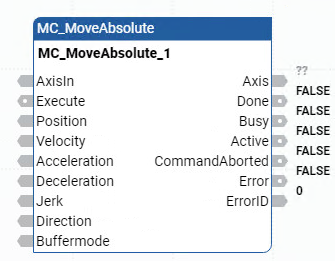
MC_MoveAbsolute
参数 | 参数类型 | 数据类型 | 描述 |
|---|---|---|---|
EN | 输入 | BOOL | 启用指令块。
仅适用于梯形图程序。 |
AxisIn | 输入 | AXIS_REF | 使用 AXIS_REF 数据类型参数定义 AxisIn。 |
Execute | 输入 | BOOL | 指示何时开始运动。
当发出此执行命令或者出现错误 MC_FB_ERR_NOT_HOMED 时,轴应处于归位位置。 |
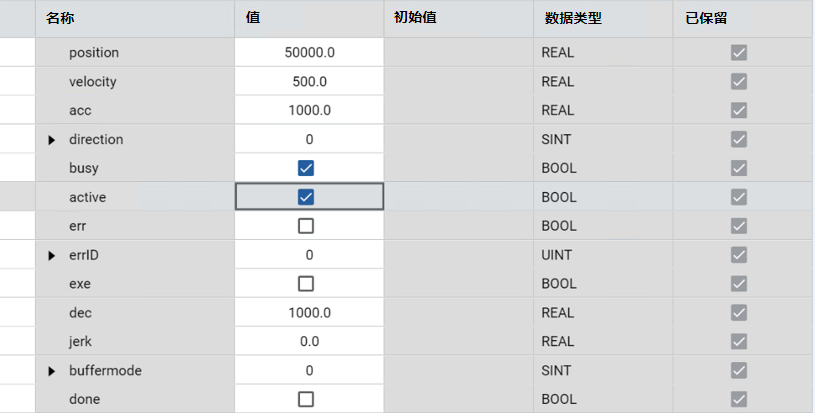
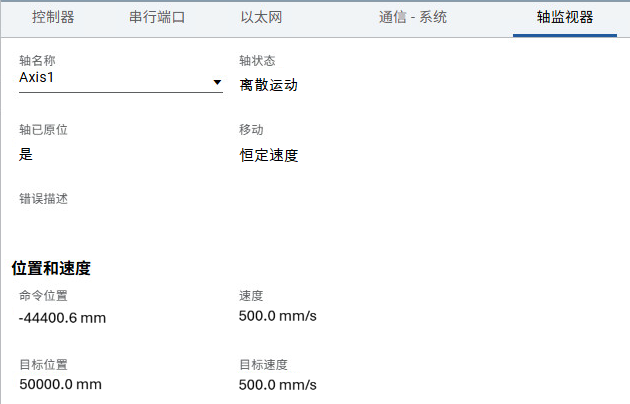
Position | 输入 | REAL | 技术单元中运动的目标位置(负值或正值)。 技术单元在轴的“ 轴 - 常规 ”选项卡进行定义。 |
Velocity | 输入 | REAL | 速度最大值。 当 Jerk = 0 时可能不会达到最大速度。 速度的符号会被忽略,运动方向由输入位置来决定。 |
Acceleration | 输入 | REAL | 加速度的值(始终为正值 - 可增加电机的能量)。 用户单位/sec 2 |
Deceleration | 输入 | REAL | 减速的值(始终为正值 - 可减少电机的能量)。 u/秒 2 |
Jerk | 输入 | REAL | 加加速度的值(始终为正值)。 u/秒 3 当输入加加速度的值为 0 时,Trapezoid 配置将由运动引擎来计算。当 Jerk > 0 时,将计算 S-Curve 配置。 |
Direction | 输入 | SINT | 此参数未使用。 |
BufferMode | 输入 | SINT | 此参数未使用。 |
ENO | 输出 | BOOL | 启用“输出”。 仅适用于梯形图程序。 |
Done | 输出 | BOOL | 当为 TRUE 时,将达到命令位置。 当此轴的原位输入配置为 Enabled 时,则在此完成位变为 True 之前,驱动器需要将原位输入信号设置为活动。 此操作完成,速度为零(除非操作被取消)。 |
Busy | 输出 | BOOL | 为 TRUE 时,功能块未完成。 |
Active | 输出 | BOOL | 当为 TRUE 时,表示功能块可控制轴 |
CommandAborted | 输出 | BOOL | 当为 TRUE 时,表示命令已被其他命令或“错误停止”覆盖。 |
Error | 输出 | BOOL | 指示发生了错误。
|
MC_MoveAbsolute 示例
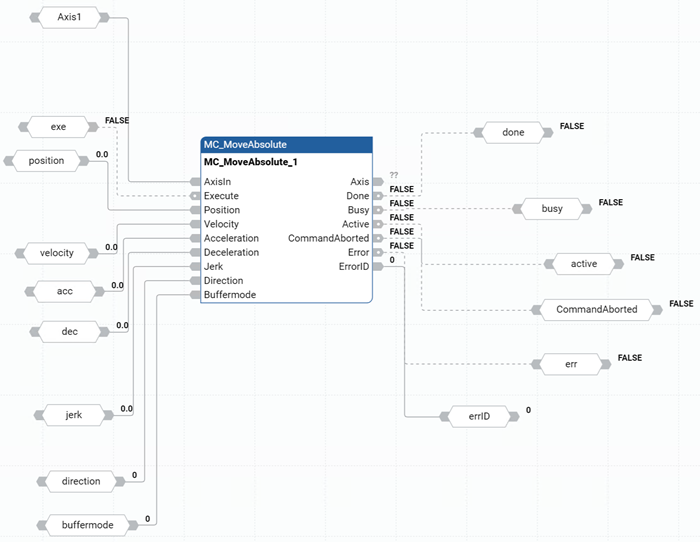
MC_MoveAbsolute 功能块图示例
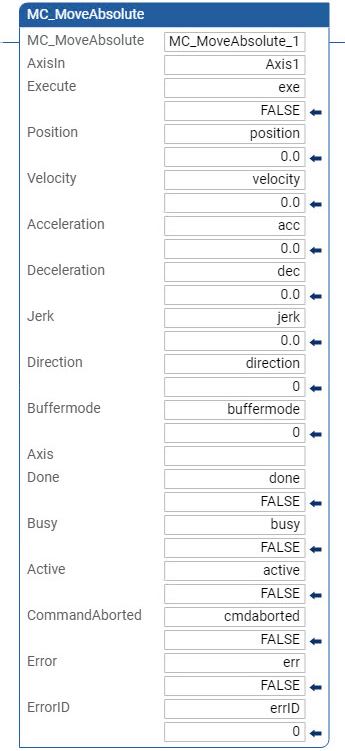
MC_MoveAbsolute 梯形图示例
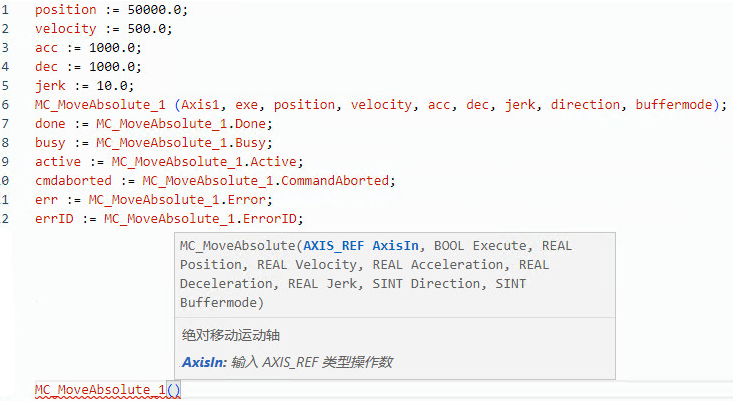
MC_MoveAbsolute 结构化文本示例
结果
提供反馈