MC_Home(运动控制原位)
MC_Home 指令可命令轴执行
<search home>
序列。此序列的详细信息依赖于制造商,可根据轴参数进行设置。Position 输入用于在检测到参考信号且达到配置的 Home 偏移时设置绝对位置。操作详细信息︰
- 发布 MC_Power 后,轴 Homed 状态会重置为 0(未归位)。多数情况下,轴接通电源后,需要执行 MC_Home 功能块,才可以校准轴位置和归位参考。
- MC_Home 功能块只能使用 MC_Stop 或 MC_Power 功能块取消。如果在完成之前取消,则先前搜索到的归位位置会被视为无效并清除轴的 Homed 状态。
支持的语言︰功能块图、梯形图和结构化文本。
该指令适用于支持运动控制的 L50E 和 L70E 控制器。
MC_Home
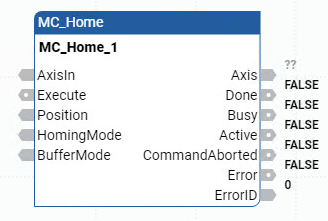
参数 | 参数类型 | 数据类型 | 描述 |
|---|---|---|---|
EN | 输入 | BOOL | 启用指令块。
仅适用于梯形图程序。 |
AxisIn | 输入 | AXIS_REF | 使用 AXIS_REF 数据类型参数定义 AxisIn。 |
Execute | 输入 | BOOL | 指示何时开始运动。
|
Position | 输入 | REAL | 当检测到参考信号且达到配置的主偏移时设置绝对位置。 在位置从用户位置转换到 PTO 脉冲时,此输入的值范围为 -0x40000000 – 0x40000000 实际值脉冲。设置软限位内的位置值。 无效的输入值导致产生了错误。错误 ID = MC_FB_ERR_PARAM。 |
HomingMode | 输入 | SINT | 归位模式的枚举输入。 |
BufferMode | 输入 | SINT | 未使用。该模式始终为 mcAborting。 |
ENO | 输出 | BOOL | 启用“输出”。 仅适用于梯形图程序。 |
Done | 输出 | BOOL |
|
Busy | 输出 | BOOL |
|
Active | 输出 | BOOL | TRUE: 表示指令块可控制轴。 |
CommandAborted | 输出 | BOOL | TRUE: 命令已被其他命令或“错误停止”覆盖。 |
Error | 输出 | BOOL | 指示发生了错误。
|
值 | 名称 | 描述 |
|---|---|---|
0x00 | MC_HOME_ABS_SWITCH | 通过搜索归位绝对开关进行的归位进程。 |
0x01 | MC_HOME_LIMIT_SWITCH | 通过搜索限位开关进行的归位进程。 |
0x02 | MC_HOME_REF_WITH_ABS | 通过搜索归位绝对开关加上使用编码器参考脉冲进行的归位进程。 |
0x03 | MC_HOME_REF_PULSE | 通过搜索限位开关加上使用编码器参考脉冲进行的归位进程。 |
0x04 | MC_HOME_DIRECT | 通过从用户参考直接强制归位位置进行的静态归位进程。功能块会将机制所在的当前位置设置为归位位置,其位置由输入参数“Position”决定。 |
MC_Home 示例
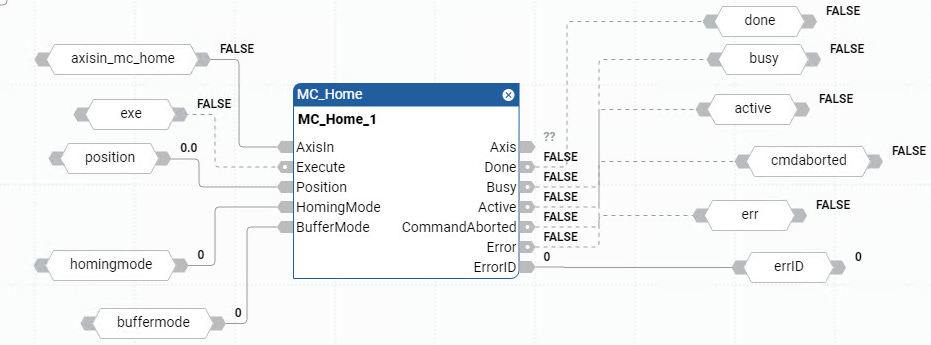
MC_Home 功能块图示例
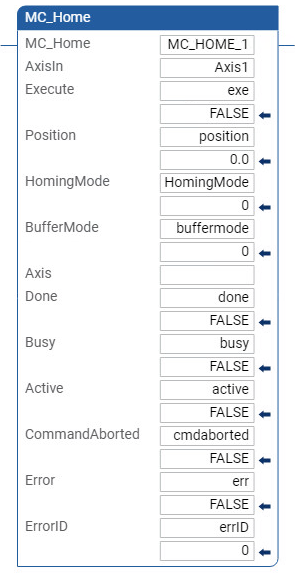
MC_Home 梯形图示例
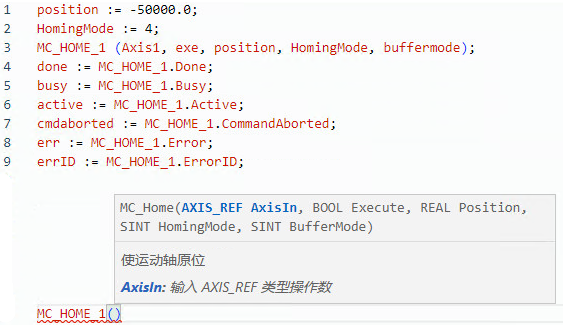
MC_Home 结构化文本示例
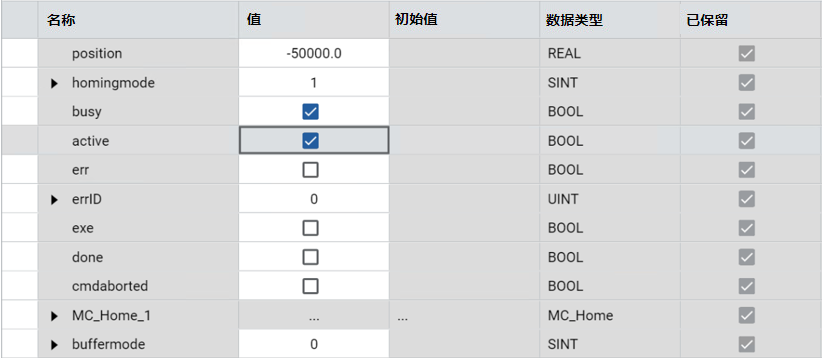
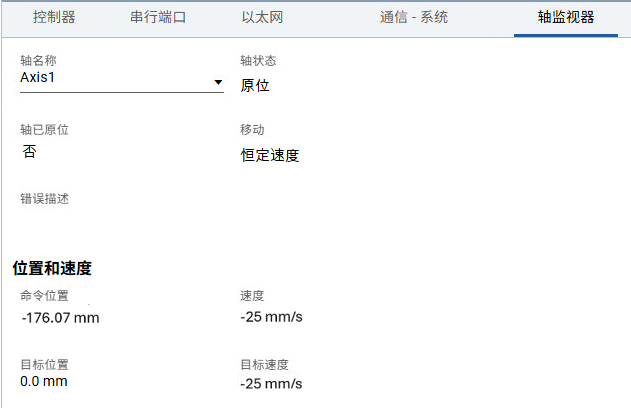
结果
提供反馈