MC_Halt(运动控制停止)
MC_Halt 指令可命令受控制的运动在正常操作条件下停止。
操作详细信息:
- 轴状态更改为“离散运动”,直到速度变为零。当速度达到零时,Done 将设置为 True,并且轴状态更改为“静止”。
- 在轴减速期间可以执行其他运动命令,而这将覆盖 MC_Halt。
- 如果在轴正处于“原位”状态时发布 MC_Halt,则该指令块会报告错误,而归位进程不会中断。
支持的语言︰功能块图、梯形图和结构化文本。
该指令适用于支持运动控制的 L50E 和 L70E 控制器。
MC_Halt
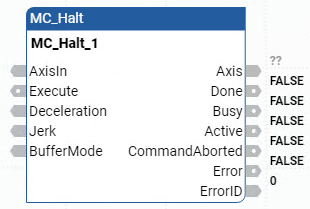
参数 | 参数类型 | 数据类型 | 描述 |
|---|---|---|---|
EN | 输入 | BOOL | 启用指令块。
适用于梯形图程序。 |
AxisIn | 输入 | AXIS_REF | 使用 AXIS_REF 数据类型参数定义 AxisIn。 |
Execute | 输入 | BOOL | 指示何时开始运动。
在归位期间执行 MC_Halt 时,MC_Halt 将被设置为 MC_FB_ERR_STATE,并且归位进程继续。 |
Deceleration | 输入 | REAL | 减速的值(始终为正值)(减少电机的能量)。 如果 Deceleration <= 0 且轴未处于“静止”状态,则 MC_Halt 将被设置为 MC_FB_ERR_RANGE。 |
Jerk | 输入 | REAL | 加加速度的值(始终为正值)。 如果 Jerk < 0 且轴处于“静止”状态,则 MC_Halt 将被设置为 MC_FB_ERR_RANGE。 |
BufferMode | 输入 | SINT | 未使用。该模式始终为 MC_Aborting。 |
ENO | 输出 | BOOL | 启用“输出”。 仅适用于梯形图程序。 |
Done | 输出 | BOOL | 达到零速度。 |
Busy | 输出 | BOOL | 指令块未完成。 |
Active | 输出 | BOOL | 表示指令块可控制轴。 |
CommandAborted | 输出 | BOOL | 命令已被其他命令或“错误停止”覆盖。 |
Error | 输出 | BOOL | 指示发生了错误。
|
MC_Halt 示例
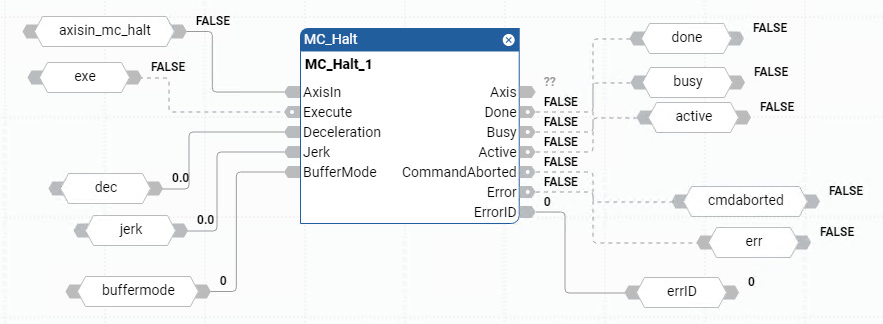
MC_Halt 功能块图示例
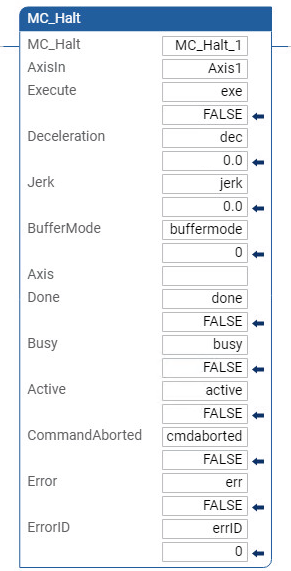
MC_Halt 梯形图示例
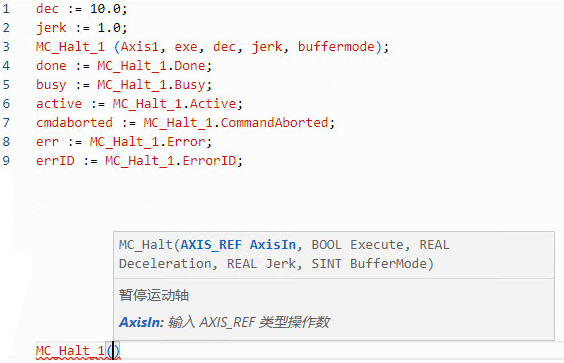
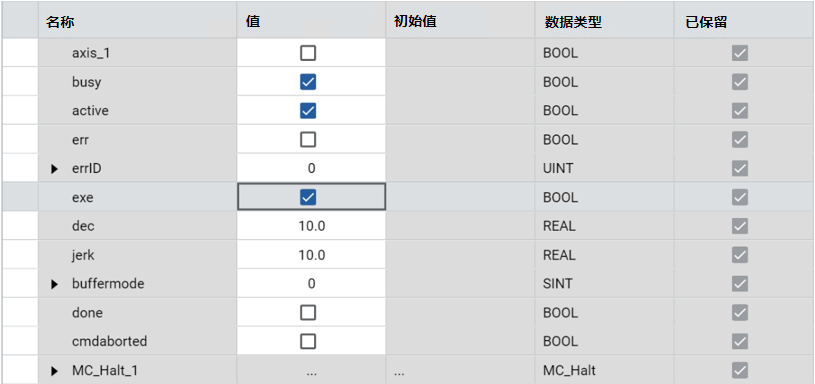
MC_Halt 结构化文本示例
结果

提供反馈