配置 SERCOS 模拟量运动控制系统
运动控制系统配置过程涉及多个不同的配置选项。基本 SERCOS 运动控制系统设置需要 Logix Designer 应用程序中的以下步骤 (Step):
步长 (Step) | 过程 | 原因 |
1. | 添加 SERCOS 运动模块 (Module) | 确定用于 Logix 控制器 (Controller) 的运动模块 |
2. | 配置模块属性 | 定义模块连接到控制器以及数据传输的方式。 |
3. | 将 SERCOS 接口驱动器模块添加到控制器I/O 配置 | 在驱动器模块和控制器之间建立通信通道 |
4. | 修改接口驱动器的属性 | 定义运动模块的轴 (Axis) 和电源设置 |
5. | 添加运动组 | 将轴合并到控制集以提供协调运动。 |
6. | 设置基本更新速率 | 选择周期速率(运动规划器执行运动任务 (Task) 的速率)来计算执行运动指令时要发送到输出模块的伺服受令位置、速度和加速度 |
7. | 添加轴 | 轴用于在一个方向上定义向前和向后运动。 |
8. | 配置 SERCOS 运动轴 (Motion Axis) | 配置运动轴的各个属性。 |
针对本快速入门,假定以下配置:
- 配置了 SERCOS 运动模块的新控制器项目
- 线性位移传感器反馈
- 伺服轴配置重要提示: 对于所有模块,请使用适用于控制器固件版本的固件版本。请参阅控制器固件的版本说明。
添加 SERCOS 运动模块
- 在控制器管理器中,右键单击背板,然后选择新建模块。
- 在选择模块类型对话框中,选择要添加的模块。
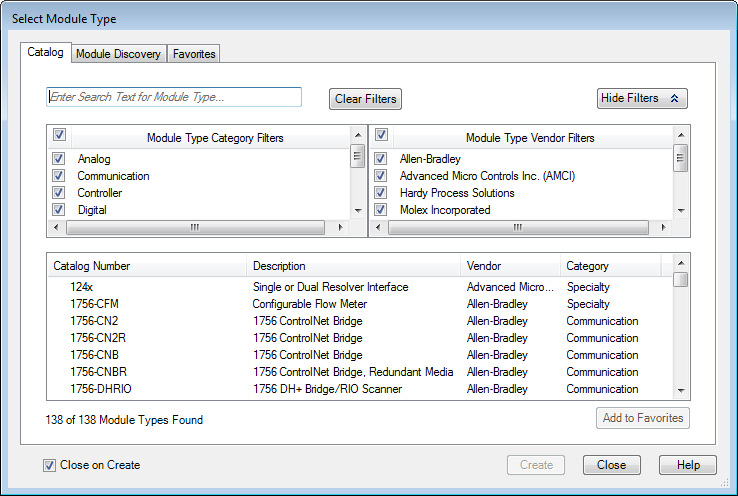
- 选中创建后关闭复选框,然后单击创建。
- 在新建模块对话框的名称框中,键入模块名称。
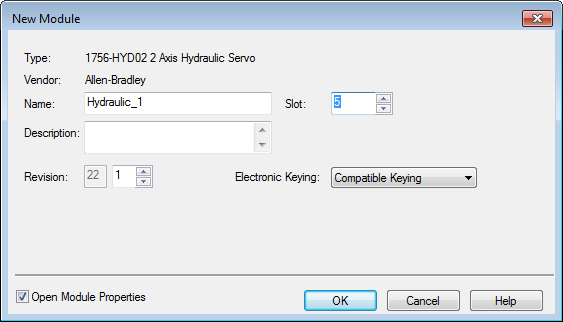
- 在插槽框中,选择与包含模块的物理插槽对应的编号。
- (可选)在说明框中,输入相关说明。
- 在电子密钥列表中,选择密钥选项兼容密钥或精确匹配。警告: 使用运动模块时不得禁用密钥。
- 选中打开模块属性复选框,然后单击确定。
配置模块属性
- 如果尚未打开模块属性报告对话框,则在控制器管理器中,双击运动模块。
- 在模块属性报告对话框中,单击连接选项卡。
- 确认已清空如果在运行模式下连接失败,则控制器将产生严重故障 (Major Fault)复选框。
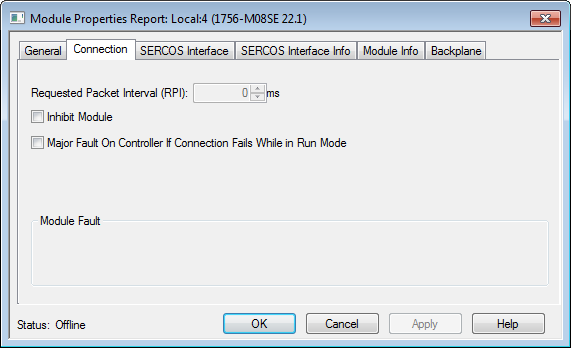 小贴士: 请在第一次执行程序 (Program) 之前,保持此复选框为空。如果选中该复选框,则当 SERCOS 环网首次尝试启动时会产生严重故障。
小贴士: 请在第一次执行程序 (Program) 之前,保持此复选框为空。如果选中该复选框,则当 SERCOS 环网首次尝试启动时会产生严重故障。 - 单击SERCOS 接口选项卡。
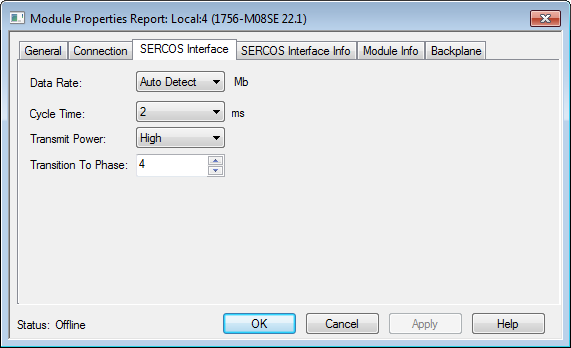
- 在数据速率和循环时间框中,使用下表作为参考,选择 SERCOS 环网的波特率 (Baud Rate) 和更新速率。关联模块的驱动器数量和数据速率决定了最短循环时间。驱动器波特率环网上的驱动器数量驱动器类型循环时间4 Mbps最多 2 个Kinetix 2000Kinetix 6000Kinetix 6200Kinetix 70000.5 毫秒最多 4 个—1 毫秒最多 8 个—2 毫秒9…16—不支持8 Mbps最多 4 个Kinetix 2000Kinetix 6000Kinetix 6200Kinetix 70000.5 毫秒最多 8 个—1 毫秒最多 16 个—2 毫秒
- 单击确定。
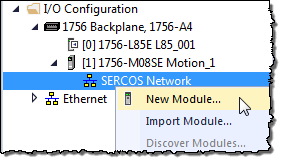
将 SERCOS 接口驱动器模块添加到控制器I/O 配置
接口模块会将控制器链接到驱动器。
- 在控制器管理器中,右键单击SERCOS 网络,然后选择新建模块。
- 在选择模块类型对话框中,选择要添加的模块。
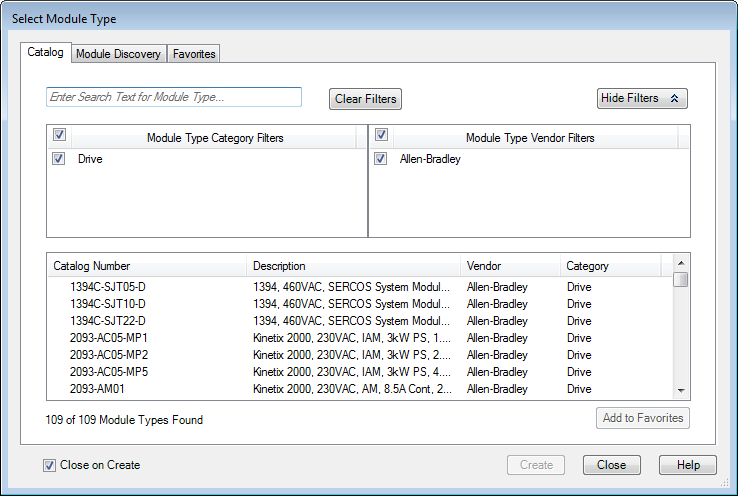
- 选中创建后关闭复选框,然后单击创建。
- 在新建模块对话框的名称框中,输入接口驱动器的名称。
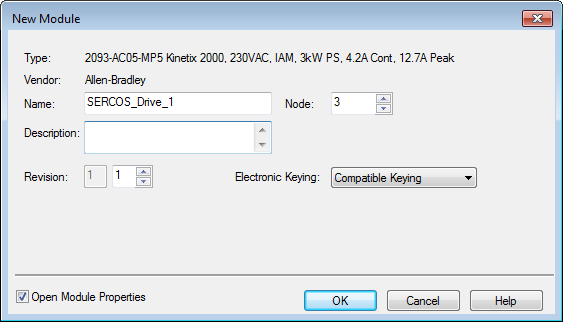
- 在节点框中,选择接口驱动器的 SERCOS 节点编号(请参见模块的旋转式开关)。
- (可选)在说明框中,输入相关说明。
- 在版本框中,选择模块的主要版本或次要版本。
- 在电子密钥列表中,选择密钥选项兼容密钥或精确匹配。警告: 使用运动模块时不得禁用密钥。
- 选中打开模块属性复选框,然后单击确定。
修改接口驱动器的属性
- 如果尚未打开模块属性报告对话框,则在控制器管理器中,双击接口驱动器。
- 在模块属性报告对话框中,单击相关轴选项卡。
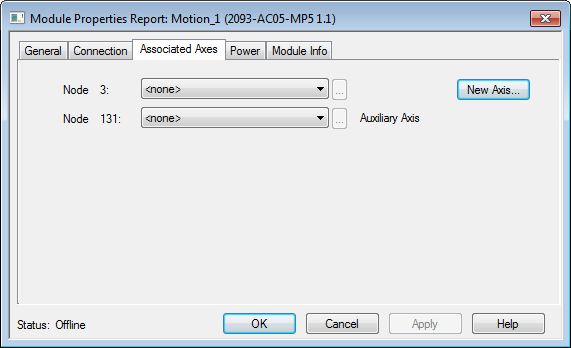
- 单击新建轴创建 AXIS_SERVO 标签 (Tag) 以关联其中一个节点。
- 在新建标签对话框的名称框中,输入轴标签名称。
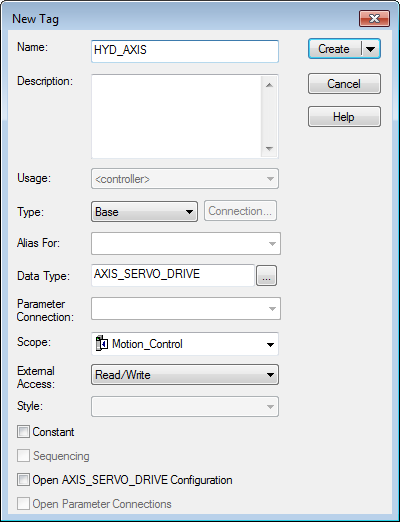
- 单击创建。
- (可选)如果需要额外的轴,请重复步骤 (Step) 3 到 5。
- 在模块属性报告对话框的节点(编号)框中,选择要与驱动器节点相关联的 AXIS_SERVO_DRIVE 标签。
- (可选)在第二个节点(编号)框中,选择轴。
- 单击电源选项卡。
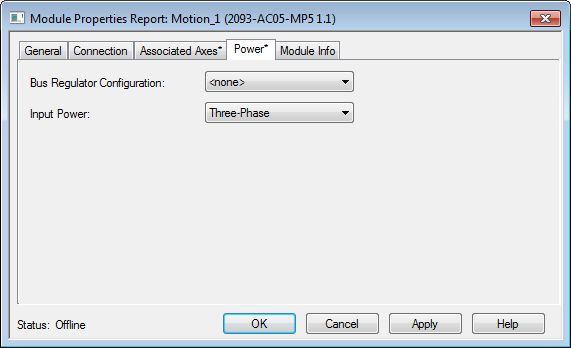
- 在母排调节器配置框中,选择描述驱动器模块使用的母排调节器设备的目录号。根据您选择的驱动器的不同,可能会提供一个或多个总线调节器标识。重要提示: 此设置不适用于 8720MC 驱动器、Ultra3000 SERCOS 驱动器或 Kinetix 6200 集成驱动器电机 (IDM) 驱动器。对于这些驱动器,无是唯一可用的选项。
- 如果要配置 Kinetix 2000 230 伏驱动器,则在输入电源框中,选择单相或三相。
- 若要配置 IDM 电源接口模块(IPIM) 或 IDM 模块,则在附加母排电容框中,选择所需的附加母排电容。仅当某个轴与 Kinetix 6000 和 Kinetix 6200 IAM 模块关联时,此参数才有效。如果某个轴一开始就与 IAM 关联,则此参数将显示默认值并处于启用状态。如果在关联的轴中设置了有效值,并且该轴不与 IAM 关联,则此参数将重置为默认值,并且在某个轴与 IAM 关联之前无法进行更改。
- 单击确定。
添加运动组
运动组将轴汇集在一起,以便将其运动控制为一个单元。
重要提示:
每个项目只能创建一个运动组。
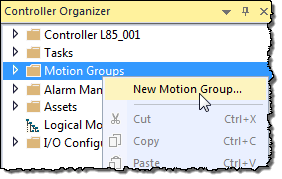
- 在控制器管理器中,右键单击运动组,然后选择新建运动组。
- 在“新建标签”对话框的“名称”框中,键入运动组名称。
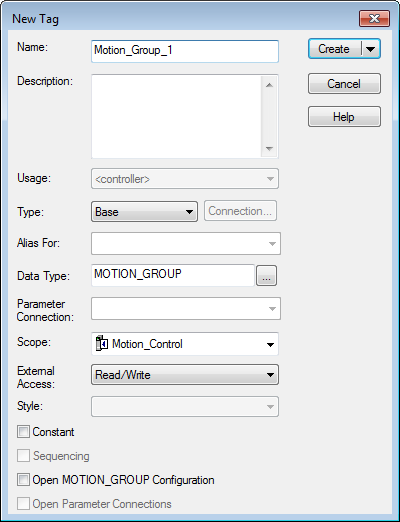
- (可选)在说明框中,输入相关说明。
- 单击创建。
设置基本更新速率
基本更新周期(也称为近似更新周期)是运动规划器运行的频率。运动规划器是控制器的一部分,用于处理轴的位置和速度信息。运动规划器运行时,无论优先级 (Priority) 如何,都会中断大多数其他任务。
- 在控制器管理器中,双击运动组。
- 单击属性选项卡。

- 在基本更新周期框中,选择更新周期。有效值范围为0.5到32,增量为 0.5。基本更新周期指南。指南说明轴数量1756-L 6x控制器 4 轴/ms1756-L7x控制器 8 轴/ms节约控制器时间留出至少一半的控制器时间来扫描所有代码。基本更新周期和 SERCOS 模块将基本更新周期设为运动模块循环时间的整倍数。示例:如果循环时间为 2 ms,则将基本更新周期设置为 8 ms、10 ms、12ms,依此类推。基本更新周期和模拟模块将基本更新周期设置为:
- 至少是运动模块伺服更新周期的 3 倍。
- 运动模块伺服更新周期的倍数。
- 在常规故障类型列表中,选择非严重故障。
- 单击确定。
添加轴
为每个驱动器添加轴。
- 在“控制器管理器”中,右键单击运动组,然后选择“新建轴”。
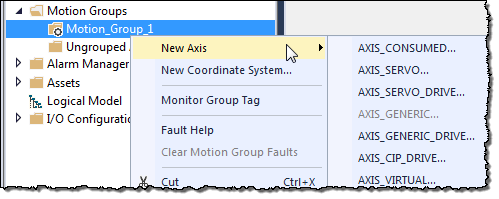
- 选择数据类型 (Data Type)。
- 对于这些运动模块,选择AXIS_SERVO_DRIVE。
- 1756-M03SE
- 1756-M08SE
- 1756-M16SE
- 1768-M04SE
- 要使用虚拟配置(无硬件),选择AXIS_VIRTUAL。
- 在新建标签对话框的名称框中,输入轴名称。
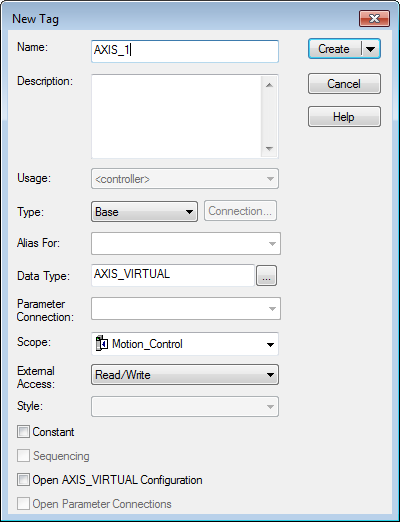
- (可选)在说明框中,键入轴的说明。
- 单击创建。
配置 SERCOS 运动轴
创建轴后,应配置 SERCOS 接口驱动器的轴。步骤 (Step) 的不同取决于所配置驱动器的类型。
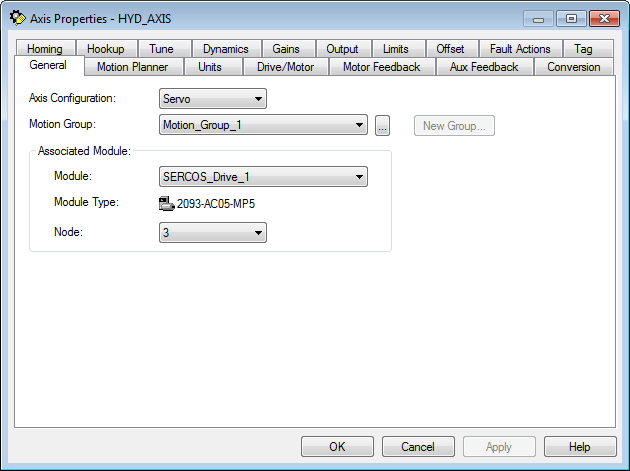
- 在控制器管理器中,双击轴。
- 在常规选项卡中,确认分配的运动组和模块信息是否正确。如有必要,应进行更改。
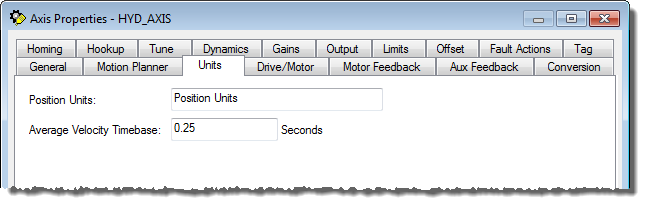
- 单击单位选项卡,在位置单位和平均速度时基框中,输入值。
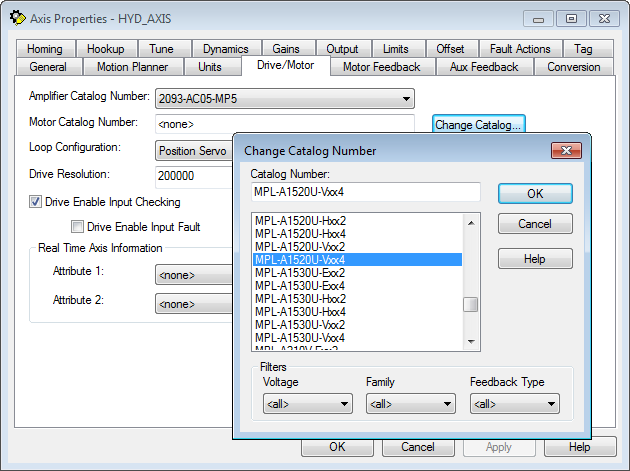
- 单击驱动器/电机选项卡。
- 单击更改目录,在更改目录号对话框中,选择相关的电机目录号,然后单击确定。
 以下条件适用于集成驱动器电机 (IDM)。
以下条件适用于集成驱动器电机 (IDM)。- 对于放大器目录号,当该轴与某个 IDM 关联时,此控件将变为灰显,无法编辑。
- 电机目录号将自动设置为运动数据库中唯一可用于 IDM 模块的有效电机的目录号(当该 IDM 模块与轴关联时)。
- IDM 的目录号会呈灰暗,且处于只读状态。它会自动针对每个 IDM 设置为运动数据库中的兼容电机。
- IDM 不支持辅助轴回路配置。当常规选项卡上的轴配置框设置为伺服时,IDM 的回路配置的选择如下:
- 位置伺服
- 双命令伺服(不使用辅助端口)
- 速度伺服
- 力矩伺服当常规选项卡上的轴配置框设置为仅反馈时,IDM 的回路配置的选择为仅电机反馈。
- 以下为 IDM 的实时属性。
- 位置命令
- 位置反馈
- 位置误差
- 位置初始化错误
- 速度命令
- 速度反馈
- 速度错误
- 速度初始化错误
- 加速命令
- 加速反馈
- 标记距离
- 力矩命令
- 力矩反馈
- 正动态力矩限制
- 负动态力矩限制
- 电机能力
- 驱动能力
- 电源能力
- 母排调节器能力
- 电机电角度
- 力矩限制源
- DC 母排电压
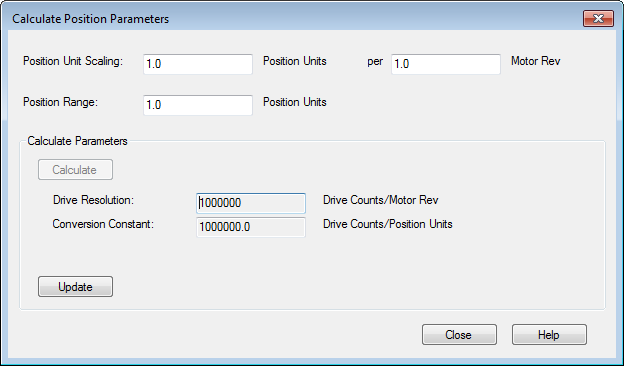
- 在驱动器分辨率框中,输入分辨率,然后在驱动器计数 /框中选择单位。
- 单击计算。
- 在计算位置参数对话框中,单击计算,检查值并根据需要进行调整,直到获得所需的计算值,然后单击更新并关闭。
- 单击自动导引选项卡,在模式框中,选择自动导引模式。
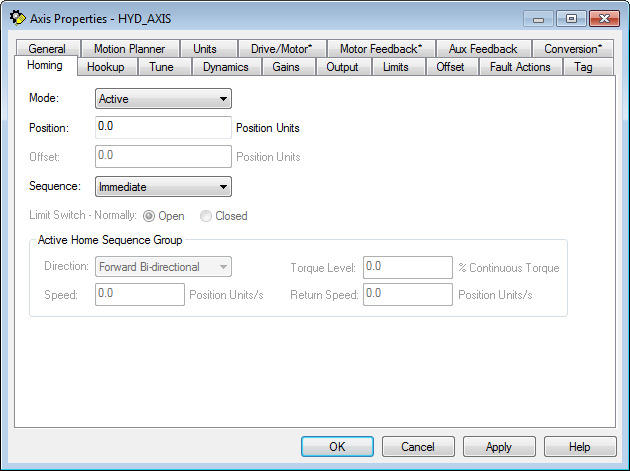
- 在位置框中,输入位置单位。
- 在序列框中,选择序列类型。
- 对于除中间以外的所有序列类型,在说明框中,选择活动自动导引序列类型,然后在速度和返回速度框中,设置自动导引速度。
- 单击确定应用更改。
提供反馈