解析器速度补偿 - 1756-PLS
1756-PLS 模块 (Module) 可以补偿调整解析器位置打开和关闭位置的速度。速度补偿使得模块 (Module) 能够在正确的时间打开或关闭输出,以便连接至 1756-PLS 模块的设备可以在任何机器速度正常工作。
以下因素影响模块 (Module)对解析器的速度进行补偿的方式:
- 开头速度 - 距离和 RPM - 影响打开位置
- 结尾速度 - 距离和 RPM - 影响关闭位置
下图说明限制开关下限-上限设置点,在该图下面,是 1756-PLS 模块 (Module) 在进行速度补偿调整之后的下限-上限设置点。注意,输出由于解析器而在原始位置精确打开和关闭。
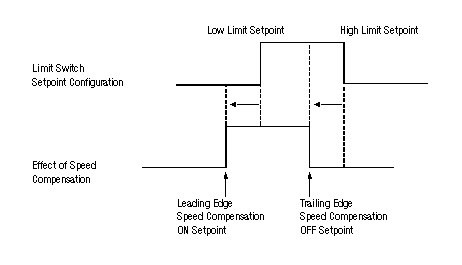
不管速度如何,输出进行时间长度都是相同的。当速度快到在 75 度之前旋转 20 毫秒时,输出距离会长一些。
开头速度距离和 RPM
LeadSpeedDistance 成员设置距离(以工程时间为单位)以从输出设置点窗口开始速度补偿的开始值。
此参数必须与 LeadSpeedRPM member 成员一起配置。LeadSpeedRPM 成员设置解析器必须调整以补偿 LeadSpeedDistance 成员的量的速度。定期将 LeadSpeedDistance 应用于实际 RPM 和 LeadSpeedRPM。
例如,您可用值为 10 的 LeadSpeedDistance 和值为 5 的 LeadSpeed RPM 配置 1756-PLS 模块 (Module)。每增加 5 RPM,设置点窗口将增加 10。值为 20 的 RPM 将导致模块 (Module) 设置点窗口 的开头增加 40。值为 13 的 RPM 将导致模块 (Module) 设置点窗口 的开头增加 26。
如果您使用距离值 0,则模块 (Module) 将不会使用速度补偿。
结尾速度距离和 RPM
TrailSpeedDistance 和 RPM 与 LeadSpeed, 相同,但影响开到关转换 (Transition) 的位置。
为特定开头时间配置速度补偿
如果 1756-PLS 模块 (Module) 用已知的滞后时间控制设备,使用时间单位配置速度补偿就可能更省力。使用公式来将滞后时间转换为等价的距离和 RPM:

例如,如果:
- 翻转计数 = 4095
- 翻转位置 = 4095
- LeadSpeedDistance = 1
- LeadSpeedRPM =1
这些参数导致限制开关在达到设定的设置点角度之前打开 14.6 毫秒。
该等式使用度作为工程单位来确定应用程序的速度补偿。

在下列情况下使用此等式:
- RolloverCounts = 4095
- RolloverPosition = 359
- LeadSpeedDistance = 1
- LeadSpeedRPM = 1
限制开关在达到设定的设置点角度之前打开 166 毫秒。
确定期望开头时间的开头速度距离和 RPM
您可能想要 1756-PLS 模块 (Module) 应用程序使用特定的开头时间。使用该工作表来计算相应的 LeadSpeedDistance 和 LeadSpeedRPM。
该工作表使用值为 1000 的 LeadSpeedRPM。
- 期望的开始时间:___________(以毫秒计)
- RolloverPosition + 1: ___________
- LeadSpeedRPM: 1000
- 使用该等式来计算 LeadSpeedDistance:

例如,当希望开始时间为 30 毫秒并且以 0.1 度为单位测量位置时,使用该工作表和等式来计算 LeadSpeedDistance。
- 期望的开始时间:30 毫秒
- 翻转位置 + 1: 3599 + 1 = 3600
- 开始速度 RPM: 1000
- 使用下面的等式来计算 LeadSpeedDistance:

RPM 滤波器
RPM 滤波器调整模块 (Module) 进行的 RPM 报告的速度,在内部用于速度补偿,跟踪实际 RPM。通常应配置 RPM 滤波器以便 1756-PLS 模块 (Module) RPM 近似地遵循任何速度更改。
可以配置 RPM 滤波器以便不报告解析器 RPM 的微小更改。在此情况下,将会报告平均 RPM 速率。
例如,可能会将解析器连接至每 0.5 秒大约在 100 和 102 RPM 之间震动的电机。如果 RPMFilter 成员已配置为在报告速度时滞后于实际 RPM,则它可能会将解析器 RPM 报告为 101。在此情况下,继续增加的速度(如 RPM 值 103 和 104)报告的时间将稍微迟于它们实际出现的时间。
使用该表来选择 RPMFilter 成员的值。
滤波器值: | 影响: |
16#4000 | 报告的 RPM 与实际 RPM 大致相符 |
16#8000 | 报告的 RPM 与实际 RPM 有些相符 |
16#C000 | 报告的 RPM 比实际 RPM 略有滞后 |
16#F000 | 报告的 RPM 滞后实际 RPM 好几秒 |
提供反馈