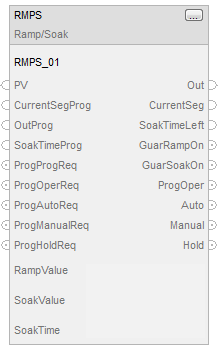
升温/持温 (RMPS)
此信息适用于
CompactLogix
5370、ControlLogix
5570、Compact GuardLogix
5370、GuardLogix
5570、Compact GuardLogix
5380、CompactLogix
5380、ControlLogix
5580、GuardLogix
5580 和 ControlLogix 5590 控制器。升温/持温 (RMPS) 指令提供一系列交替出现升温和持温周期的分段。
可用语言
梯形图
此指令不可用于梯形图逻辑中。
功能块
结构化文本
RMPS(RMPS_tag,RampValue,SoakValue,SoakTime);
操作数
功能块
操作数 | 类型 | 格式 | 说明 |
|---|---|---|---|
RMPS tag | RAMP_SOAK | 结构 | RMPS 结构 |
RampValue | REAL | 数组 | 升温值数组。输入每个分段(0 到 NumberOfSegs-1)的升温值。升温值可采用时间(分钟)或速率(单位/分钟)两种形式输入。TimeRate 参数指示升温值的指定方式。如果升温值无效,指令会将 Status 中的相应位置位,并切换到“操作员手动”或“程序保持”模式。此数组的大小至少应与 NumberOfSegs 相当。 有效值 = 0.0 到最大正浮点值 |
SoakValue | REAL | 数组 | 持温值数组。输入每个分段(0 到 NumberOfSegs-1)的持温值。此数组的大小至少应与 NumberOfSegs 相当。 有效值 = 任意浮点值 |
SoakTime | REAL | 数组 | 持温时间数组。输入每个分段(0 到 NumberOfSegs-1)的持温时间。持温时间以分钟为单位输入。如果持温值无效,指令会将 Status 中的相应位置位,并切换到“操作员手动”或“程序保持”模式。此数组的大小至少应与 NumberOfSegs 相当。 有效值 = 0.0 到最大正浮点值 |
结构化文本
操作数 | 类型 | 格式 | 说明 |
|---|---|---|---|
RMPS tag | RAMP_SOAK | 结构 | RMPS 结构 |
RampValue | REAL | 数组 | 升温值数组。输入每个分段(0 到 NumberOfSegs-1)的升温值。升温值可采用时间(分钟)或速率(单位/分钟)两种形式输入。TimeRate 参数指示升温值的指定方式。如果升温值无效,指令会将 Status 中的相应位置位,并切换到“操作员手动”或“程序保持”模式。此数组的大小至少应与 NumberOfSegs 相当。 有效值 = 0.0 到最大正浮点值 |
SoakValue | REAL | 数组 | 持温值数组。输入每个分段(0 到 NumberOfSegs-1)的持温值。此数组的大小至少应与 NumberOfSegs 相当。 有效值 = 任意浮点值 |
SoakTime | REAL | 数组 | 持温时间数组。输入每个分段(0 到 NumberOfSegs-1)的持温时间。持温时间以分钟为单位输入。如果持温值无效,指令会将 Status 中的相应位置位,并切换到“操作员手动”或“程序保持”模式。此数组的大小至少应与 NumberOfSegs 相当。 有效值 = 0.0 到最大正浮点值 |
有关结构化文本中表达式语法的详细信息,请参见
结构化文本语法
部分。RMPS 结构
指定各指令的唯一 RMPS 结构。
输入参数 | 数据类型 | 说明 |
|---|---|---|
EnableIn | BOOL | 启用输入。如果为假,指令不会执行,也不会更新输出。 默认值为真。 |
PV | REAL | 将缩放后的模拟温度信号输入到指令中。 有效值 = 任意浮点值 默认值 = 0.0 |
PVFault | BOOL | PV 状况不良指示器。如果该值为真,指令将进入“程序保持”模式或“操作员手动”模式,并将 Status 中的相应位置位。 默认值为假。 |
NumberOfSegs | DINT | 分段数。指定指令使用的升温/持温分段数。RampValue、SoakValue 和 SoakTime 数组的大小至少应等于 NumberOfSegs。如果该值无效,指令将进入“操作员手动”或“程序保持”模式,并将 Status 中的相应位置位。 有效值 = 1 到(RampValue、SoakValue 或 SoakTime 数组的最小大小) 默认值 = 1 |
ManHoldAftInit | BOOL | 初始化后进入手动/保持模式。如果该值为真,升温/持温过程在初始化完成后将进入“操作员手动”或“程序保持”模式。否则,升温/持温过程在初始化完成后将保持其先前模式。 默认值为假。 |
CyclicSingle | BOOL | 循环/单次执行。真值表示循环操作,假值表示单次操作。循环操作模式会不断重复升温/持温曲线。单次操作模式会执行一次升温/持温曲线,然后停止。 默认值为假。 |
TimeRate | BOOL | 以时间/速率配置升温值。如果以达到持温温度的时间(分钟)输入 RampValue 参数值,则该值为真。如果以速率(单位/分钟)输入 RampValue 参数值,则该值为假。 默认值为假。 |
GuarRamp | BOOL | 保证升温。如果该值为真且指令处于自动模式,则当 PV 与输出值之差大于 RampDeadband 时,暂停升温。 默认清零。 |
RampDeadband | REAL | 保证升温的死区值。指定在启用 GuarRamp 的情况下 PV 与输出值之间允许的差值(工程单位)。如果该值无效,指令将设置 RampDeadband = 0.0 并置位 Status 中的相应位。 有效值 = 任何  0.0 的浮点数 0.0 的浮点数默认值 = 0.0 |
GuarSoak | BOOL | 保证持温。如果该值为真且指令处于自动模式,则当 PV 与输出值之差大于 SoakDeadband 时,持温计时器清零。 默认值为假。 |
SoakDeadband | REAL | 保证持温的死区值。指定在启用 GuarSoak 的情况下 PV 与输出值之间允许的差值(工程单位)。如果该值无效,指令将设置 SoakDeadband = 0.0 并置位 Status 中的相应位。 有效值 = 任何 0.0 的浮点数默认值 = 0.0 |
CurrentSegProg | DINT | 程序控制模式下的当前分段。用户程序将请求的 CurrentSeg 值写入此输入。当升温/持温过程处于“程序手动”模式时,使用该值。如果该值无效,指令会将 Status 中的相应位置位。 有效值 = 0 到 NumberOfSegs-1 默认值 = 0 |
OutProg | REAL | 程序控制模式下的输出。用户程序将请求的 Out 值写入此输入。当升温/持温过程处于“程序手动”模式时,使用该值。 有效值 = 任意浮点值 默认值 = 0.0 |
SoakTimeProg | REAL | 程序控制模式下的持温时间。用户程序将请求的 SoakTimeLeft 值写入此输入。当升温/持温过程处于“程序手动”模式时,使用该值。如果该值无效,指令会将 Status 中的相应位置位。 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CurrentSegOper | DINT | 操作员控制模式下的当前分段。操作员界面将请求的 CurrentSeg 值写入此输入。当升温/持温过程处于“操作员手动”模式时,使用该值。如果该值无效,指令会将 Status 中的相应位置位。 有效值 = 0 到 NumberOfSegs-1 默认值 = 0 |
OutOper | REAL | 操作员控制模式下的输出。操作员界面将请求的 Out 值写入此输入。当升温/持温过程处于“操作员手动”模式时,使用该值。 有效值 = 任意浮点值 默认值 = 0.0 |
SoakTimeOper | REAL | 操作员控制模式下的持温时间。操作员界面将请求的 SoakTimeLeft 值写入此输入。当升温/持温过程处于“操作员手动”模式时,使用该值。如果该值无效,指令会将 Status 中的相应位置位。 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
ProgProgReq | BOOL | 程序发出的程序控制请求。由用户程序设置为真可请求程序控制模式。如果 ProgOperReq 为真,则忽略该值。若此参数保持为真,并且 ProgOperReq 保持为假,会将指令锁定在程序控制模式。 默认值为假。 |
ProgOperReq | BOOL | 程序发出的操作员控制请求。由用户程序设置为真可请求操作员控制模式。若将此参数保持为真,会将该指令锁定在操作员控制模式。 默认值为假。 |
ProgAutoReq | BOOL | 程序自动模式请求。由用户程序设置为真可请求升温/持温过程进入自动模式。如果回路处于操作员控制模式、ProgManualReq 为真或者 ProgHoldReq 为真,则忽略该值。 默认值为假。 |
ProgManualReq | BOOL | 程序手动模式请求。由用户程序设置为真可请求升温/持温过程进入手动模式。如果升温/持温过程处于操作员控制模式或者 ProgHoldReq 为真,则忽略该值。 默认值为假。 |
ProgHoldReq | BOOL | 程序保持模式请求。由用户程序设置为真可请求停止升温/持温,同时不改变 Out、CurrentSeg 或 SoakTimeLeft 值。当从升温/持温获取设置点的 PID 回路退出级联时,该值也非常有用。操作员也可以通过将升温/持温设置为操作员手动模式来达到相同效果。 默认值为假。 |
OperProgReq | BOOL | 操作员发出的程序控制请求。由操作员界面设置为真以请求程序控制模式。如果 ProgOperReq 为真,则忽略该值。指令将该输入设置为假。 默认值为假。 |
OperOperReq | BOOL | 操作员发出的操作员控制请求。由操作员界面设置为真可请求操作员控制模式。如果 ProgProgReq 为真且 ProgOperReq 为假,则忽略该值。指令将该输入设置为假。 默认值为假。 |
OperAutoReq | BOOL | 操作员自动模式请求。由操作员界面设置为真可请求升温/持温过程进入自动模式。如果回路处于程序控制模式或 OperManualReq 为真,则忽略该值。指令将该输入设置为假。 默认值为假。 |
OperManualReq | BOOL | 操作员手动模式请求。由操作员界面设置为真可请求升温/持温过程进入手动模式。如果回路处于程序控制模式,则忽略该值。指令将该输入设置为假。 默认值为假。 |
Initialize | BOOL | 初始化程序和操作员值。如果该值为真且处于手动模式,则指令会设置 CurrentSegProg = 0、CurrentSegOper = 0、SoakTimeProg = SoakTime[0] 以及 SoakTimeOper = SoakTime[0]。处于自动或保持模式时,将忽略 Initialize 值。指令会将此参数设置为假。 默认值为假。 |
ProgValueReset | BOOL | 将程序控制值复位。如果该值为真,则指令会将 ProgProgReq、ProgOperReq、ProgAutoReq、ProgHoldReq 和 ProgManualReq 设置为假。 默认值为假。 |
输出参数 | 数据类型 | 说明 |
|---|---|---|
EnableOut | BOOL | 指示指令是否处于启用状态。如果 Out 溢出,则设置为假。 |
Out | REAL | 升温/持温指令的输出。 |
CurrentSeg | DINT | 当前分段号。显示升温/持温循环的当前分段号。分段编号从 0 开始。 |
SoakTimeLeft | REAL | 剩余持温时间。显示当前持温时间。 |
GuarRampOn | BOOL | 保证升温状态。如果正在使用保证升温功能,并且升温因 PV 与输出值之差大于 RampDeadband 而暂停,则该值设置为真。 |
GuarSoakOn | BOOL | 保证持温状态。如果正在使用保证持温功能,并且持温计时器因 PV 与输出值之差大于 SoakDeadband 而清零,则该值设置为真。 |
ProgOper | BOOL | 程序/操作员控制指示器。在程序控制模式下为真。在操作员控制模式下为假。 |
Auto | BOOL | 自动模式。当升温/持温处于“程序自动”模式或“操作员自动”模式时为真。 |
Manual | BOOL | 手动模式。当升温/持温处于“程序手动”模式或“操作员手动”模式时为真。 |
Hold | BOOL | 保持模式。当升温/持温处于程序“保持”模式时为真。 |
Status | DINT | 功能块的状态。 |
InstructFault (Status.0) | BOOL | 该指令检测到以下执行错误之一。这不是轻微或严重的控制器错误。检查其他状态位以确定发生的情况。 |
PVFaulted (Status.1) | BOOL | PV 状况不良。 |
NumberOfSegsInv (Status.2) | BOOL | NumberOfSegs 值无效,或与数组大小不兼容。 |
RampDeadbandInv (Status.3) | BOOL | RampDeadband 值无效。 |
SoakDeadbandInv (Status.4) | BOOL | SoakDeadband 值无效。 |
CurrSegProgInv (Status.5) | BOOL | CurrSegProg 值无效。 |
SoakTimeProgInv (Status.6) | BOOL | SoakTimeProg 值无效。 |
CurrSegOperInv (Status.7) | BOOL | CurrSegOper 值无效。 |
SoakTimeOperInv (Status.8) | BOOL | SoakTimeOper 值无效。 |
RampValueInv (Status.9) | BOOL | RampValue 值无效。 |
SoakTimeInv (Status.10) | BOOL | SoakTime 值无效。 |
说明
RMPS 指令通常用于在批量加热过程中提供温度曲线。该指令的输出通常作为 PID 回路设置点的输入。
一旦计算出的输出值无效(NAN 或  INF),指令会设置 Out = 无效值,并将数学溢出状态标志置位。内部参数不会更新。在每次的后续扫描过程中,都会使用上一次扫描(输出有效)的内部参数计算输出。
INF),指令会设置 Out = 无效值,并将数学溢出状态标志置位。内部参数不会更新。在每次的后续扫描过程中,都会使用上一次扫描(输出有效)的内部参数计算输出。
INF),指令会设置 Out = 无效值,并将数学溢出状态标志置位。内部参数不会更新。在每次的后续扫描过程中,都会使用上一次扫描(输出有效)的内部参数计算输出。监视 RMPS 指令
RMPS 指令有相应的操作员面板。
影响数学状态标志
否
严重/轻微故障
没有特定于此指令的故障。有关操作数相关的故障,请参阅 通用属性。
执行
功能块
条件/状态 | 执行的操作 |
|---|---|
预扫描 | EnableIn 和 EnableOut 位设置为假。 |
Tag.EnableIn 为假 | EnableIn 和 EnableOut 位设置为假。 |
Tag.EnableIn 为真 | EnableIn 和 EnableOut 位设置为真。 指令执行。 |
指令首次运行 | 将 CurrentSeg 清零。 将模式设置为操作员手动模式。 如果 SoakTime[0] 有效,则将 SoakTimeProg 和 SoakTimeOper 设置为 SoakTime[0]。 |
指令首次扫描 | 将所有操作员请求输入清零。 如果 ProgValueReset 为真,则将所有程序请求输入清零。 如果当前处于保持模式,则将操作员控制模式设置为手动模式。 |
后扫描 | EnableIn 和 EnableOut 位设置为假。 |
结构化文本
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 请参见“功能块”表中的“预扫描”行。 |
正常执行 | 请参见“功能块”表中的“Tag.EnableIn 为真”行。 |
后扫描 | 请参见“功能块”表中的“后扫描”行。 |
指令首次扫描后的初始模式
下表所示为基于程序请求输入所获得的最终控制模式。
首次扫描开始时的控制模式 | ProgOperReq | ProgProgReq | ProgValueReset | FirstRun | 首次扫描结束时的控制模式 |
|---|---|---|---|---|---|
操作员控制 | 假 | 真 | 假 | 不适用 | 程序控制 |
不适用 | 假 | 不适用 | 不适用 | 操作员控制 | |
程序控制 | 真 | 不适用 | 假 | 假 | 操作员控制 |
不适用 | 不适用 | 真 | 真 | 操作员控制 | |
假 | 假 | 假 | 真 | 操作员控制 | |
假 | 真 | 假 | 不适用 | 程序控制 | |
不适用 | 不适用 | 真 | 假 | 程序控制 | |
假 | 假 | 假 | 假 | 程序控制 |
下表所示为基于“手动”、“自动”和“保持”模式请求所获得的最终控制模式。
首次扫描开始时的控制模式 | 操作员 自动 请求 | 操作员 手动 请求 | 程序 自动 请求 | 程序 手动 请求 | 程序 挂起 请求 | 手动 挂起 初始化后 | 程序 值 重置 | 首次 运行 | 首次扫描结束时的 控制模式 |
|---|---|---|---|---|---|---|---|---|---|
操作员控制 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 | 假 | 不适用 | 假 | 操作员当前模式 |
不适用 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 | 不适用 | 操作员手动模式 | ||
不适用 | 不适用 | 不适用 | 不适用 | 不适用 | 真 | 不适用 | 不适用 | ||
程序控制 | 不适用 | 不适用 | 假 | 假 | 假 | 假 | 不适用 | 假 | 程序当前模式 |
不适用 | 不适用 | 不适用 | 不适用 | 不适用 | 假 | 真 | 假 | ||
不适用 | 不适用 | 真 | 假 | 假 | 假 | 假 | 不适用 | 程序自动模式 | |
不适用 | 不适用 | 不适用 | 真 | 假 | 假 | 假 | 不适用 | 程序手动模式 | |
不适用 | 不适用 | 不适用 | 不适用 | 真 | 假 | 假 | 不适用 | 程序保持模式 | |
不适用 | 不适用 | 不适用 | 不适用 | 不适用 | 真 | 不适用 | 不适用 |
示例
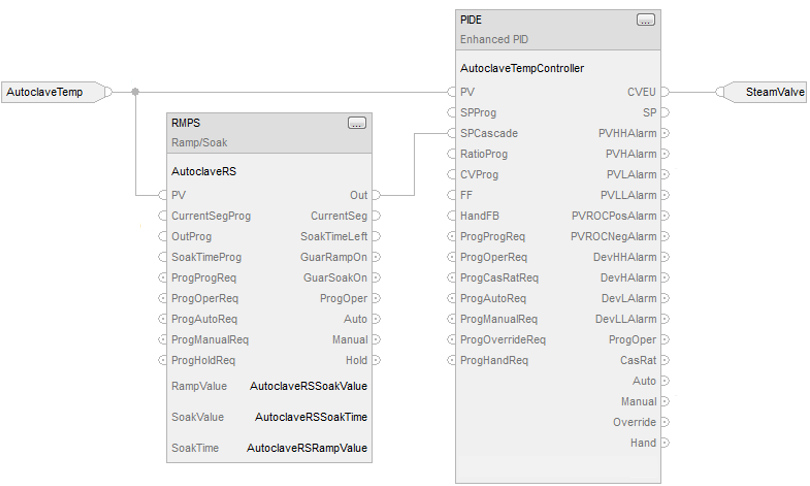
在此示例中,RMPS 指令将驱动 PIDE 指令的设置点。当 PIDE 指令处于“级联/比率”模式时,使用 RMPS 指令的输出作为设置点。如果要使用保证升温和/或保证持温功能,可选择将 PIDE 指令的 PV 送入 RMPS 指令的 PV 输入。
在此示例中,AutoclaveRSSoakValue、AutoclaveRSSoakTime 和 AutoclaveRSRampValue 数组均为包含 10 个元素的 REAL 数组,最多允许使用 10 段 RMPS 曲线。
功能块
在程序控制与操作员控制之间切换
RMPS 指令可以通过用户程序或操作员界面进行控制。可随时更改控制模式。
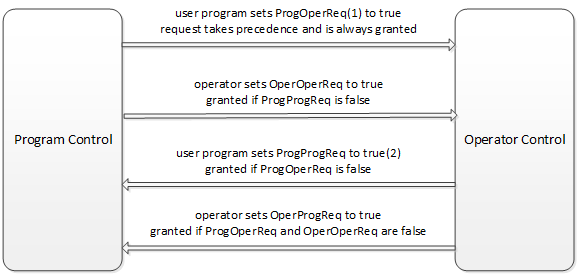
(1) ProgOperReq 保持为真时,指令锁定为操作员控制模式。
(2) ProgProgReq 保持为真且 ProgOperReq 为假时,指令锁定为程序控制模式。
当 ProgAutoReq、ProgManualReq 和 ProgHoldReq 输入均为假时,如果从操作员控制转换到程序控制模式,将按如下规则确定模式:
如果转换前指令处于“操作员自动”模式,则转换为“程序自动”模式。
如果转换前指令处于“操作员手动”模式,则转换为“程序手动”模式。
当 OperAutoReq 和 OperManualReq 输入均为假时,如果从程序控制转换到操作员控制模式,将按如下规则确定模式:
如果转换前指令处于“程序自动”模式,则转换为“操作员自动”模式。
如果转换前指令处于“程序手动”或“程序保持”模式,则转换为“操作员手动”模式。
程序控制
下图所示为 RMPS 指令在程序控制模式下的工作情况。
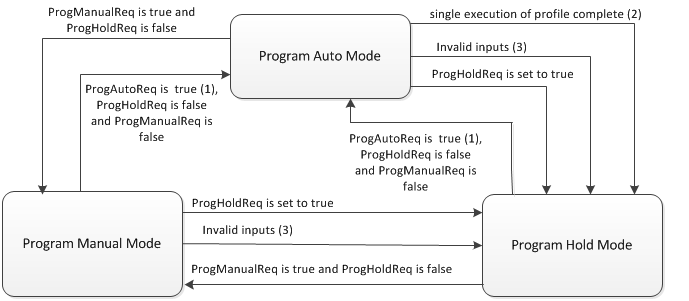
(1) 在单次(非循环)执行过程中,如果要在完成一次升温/持温曲线后再次执行升温/持温曲线,必须将 ProgAutoReq 从假切换为真。
(2) 如果将指令配置为单次执行,则在自动模式下完成升温/持温曲线时,指令将转换为保持模式。
(3) 如果 PVFaulted 为真或以下任一输入无效,指令将进入保持模式:NumberOfSegs、CurrentSegProg 或 SoakTimeProg。
下表介绍各种可能的程序控制模式。
模式 | 说明 |
|---|---|
程序自动模式 | 在自动模式下,指令将按顺序执行升温/持温曲线。 |
程序手动模式 | 在手动模式下,由用户程序直接控制指令的 Out 输出。CurrentSegProg、SoakTimeProg 和 OutProg 输入将传送到 CurrentSeg、SoakTimeLeft 和 Out 输出。当指令进入自动模式时,升温/持温函数继续使用上次由用户程序输入的值。如果 CurrentSegProg 和 SoakTimeProg 无效,则不会传输到相应输出。 当 ProgValueReset 置位且指令不处于“程序手动”模式时,为“无扰动地”转换到手动模式,CurrentSegProg、SoakTimeProg 和 OutProg 输入会持续更新为当前的 CurrentSeg、SoakTimeLeft 和 Out 值。 |
程序保持模式 | 在保持模式下,指令的输出保持当前值不变。如果在此模式下通过将 ProgOperReq 置位来切换到操作员控制模式,指令将进入“操作员手动”模式。 |
操作员控制
下图所示为 RMPS 指令在操作员控制模式下的工作情况。
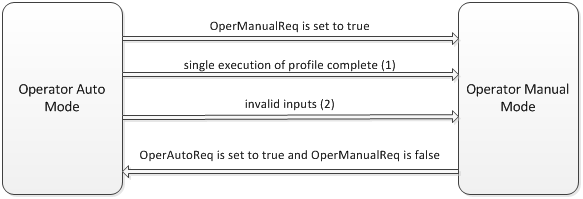
(1) 如果将指令配置为单次执行,则在自动模式下完成升温/持温曲线时,指令将转换为手动模式。
(2) 如果 PVFaulted 为真或以下任一输入无效,指令将进入手动模式:NumberOfSegs、CurrentSegOper 或 SoakTimeOper。
下表介绍各种可能的操作员控制模式。
模式 | 说明 |
|---|---|
操作员自动模式 | 在自动模式下,指令将按顺序执行升温/持温曲线。 |
操作员手动模式 | 在手动模式下,由操作员直接控制指令的 Out 输出。CurrentSegOper、SoakTimeOper 和 OutOper 输入将传送到 CurrentSeg、SoakTimeLeft 和 Out 输出。当指令进入自动模式时,升温/持温函数继续使用上次由操作员输入的值。如果 CurrentSegOper 和 SoakTimeOper 无效,则不会传输到相应输出。 当指令不处于“操作员手动”模式时,为“无扰动地”转换到手动模式,CurrentSegOper、SoakTimeOper 和 OutOper 输入会持续更新为当前的 CurrentSeg、SoakTimeLeft 和 Out 值。 |
执行升温/持温曲线
下图说明 RMPS 指令执行升温/持温曲线的过程。
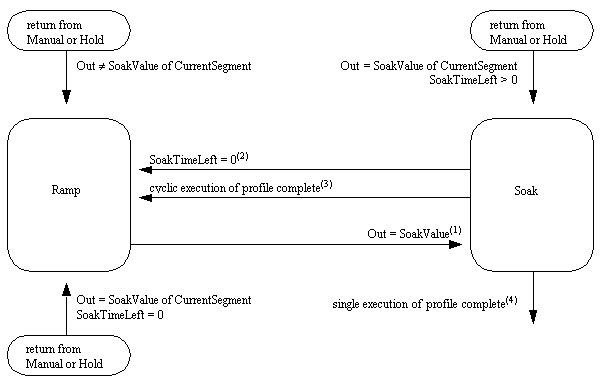
(1) Out = SoakValue 时升温过程结束。如果在升温期间 Out > SoakValue,则将 Out 限定为 SoakValue。
(2) 当 Out 保持不变的时间达到当前分段的 SoakTime 所指定的时长时,持温过程结束。如果执行的分段并非最后一个分段,则 CurrentSeg 增加一。
(3) 最后一个设定分段的持温过程结束,指令配置为循环执行。指令设置 CurrentSeg = 0。
(4) 最后一个设定分段的持温过程结束,指令配置为单次执行。
(5) 返回自动模式时,指令将决定是否继续执行升温或持温。下一步动作取决于当前分段的 Out、SoakTimeLeft 和 SoakValue 值。如果当前分段的 Out=SoakValue 且 SoakTimeLeft =0,则表明当前分段完成,下一分段开始。
升温
在升温循环中,Out 将由前一分段的 SoakValue 值升温至当前分段的 SoakValue 值。升温经过的时间由 RampValue 参数定义。
如果 Out 值 < 当前分段的目标 SoakValue 值,则升温过程为正向。如果根据升温公式计算出的新 Out 值超过目标 SoakValue 值,则 Out 值将设置为目标 SoakValue 值。
如果 Out 值 > 当前分段的目标 SoakValue 值,则升温过程为负向。如果根据升温公式计算出的新 Out 值小于目标 SoakValue 值,则 Out 值将设置为目标 SoakValue 值。
每个分段都有相应的升温值。可选择以时间或速率为单位设定升温值。所有分段必须设定为相同的单位。下表介绍各个升温选项:
参数 | 说明 |
|---|---|
基于时间的升温 | TimeRate 设置为真时,采用基于时间的升温(分钟) 将计算当前分段的变化率,并在 Out 值基础上相加或相减,直至 Out 值达到当前分段的持温值。在下面的公式中,DeltaT 是指自指令最后一次执行起经过的时间(分钟)。  其中,RampStart 是当前分段开始时的 Out 值。 |
基于速率的升温 | TimeRate 清零时,采用基于速率的升温(单位/分钟) 在 Out 值的基础上加上或减去设定的变化率,直至 Out 值达到当前分段的持温值。在下面的公式中,DeltaT 是指自指令最后一次执行起经过的时间(分钟)。  |
保证升温
将 GuarRamp 输入设置为真时,启用保证升温。启用后,指令将监视 Out 与 PV 之间的差值。如果该差值超过设定的 RampDeadband 值,则输出保持不变,直至 PV 与 Out 的差值进入死区范围。当 Out 值由于保证升温的作用而保持不变时,输出 GuarRampOn 将设置为真。
持温
持温过程是指在下一个升温-持温分段开始前块输出保持不变的时间段。在持温循环期间,输出会在进入下一分段之前的设定时间内保持为 SoakValue 值。持温期间的输出保持时间在 SoakTime 参数中设定。
每个分段都有对应的 SoakValue 和 SoakTime 值。当 Out 升温至当前分段的 SoakValue 值时,持温过程开始。SoakTimeLeft 值表示剩余的输出保持时间(分钟)。在升温期间,SoakTimeLeft 将设置为当前分段的 SoakTime 值。升温过程完成后,SoakTimeLeft 值开始减小,以反映当前分段的剩余时间(分钟)。经过 SoakTime 时间后,SoakTimeLeft = 0。
保证持温
将 GuarSoak 输入设置为真时,启用保证持温。启用后,指令将监视 Out 与 PV 之间的差值。如果该差值超过 SoakDeadband 值,将暂停持温循环的计时,同时将内部持温计时器清零。当 Out 与 PV 之间的差值重新进入死区范围内时,继续计时。当计时由于保证持温的作用而暂停时,输出 GuarSoakOn 将设置为真。
提供反馈