协调控制 (CC)
此信息适用于
CompactLogix
5370、ControlLogix
5570、Compact GuardLogix
5370、GuardLogix
5570、Compact GuardLogix
5380、CompactLogix
5380、ControlLogix
5580、GuardLogix
5580 和 ControlLogix 5590 控制器。协调控制 (CC) 指令通过操作多达三个不同的控制变量控制单个过程变量。此外,也可以将三个输出中的任意一个用作输入,以在控制器中创建前馈操作。在自动模式下,CC 基于 PV -SP 偏差、内部模型和调节,计算控制变量(CV1、CV2 和 CV3)。
可用语言
梯形图
此指令不可用于梯形图逻辑中。
功能块
结构化文本
CC(CC_tag);
操作数
结构化文本
操作数 | 类型 | 格式 | 说明 |
CC 标签 | COORDINATED_ CONTROL | 结构 | CC 结构 |
有关结构化文本中表达式语法的详细信息,请参见“结构化文本语法”部分。
重要提示:
只要 APC 块检测到增量时间 (DeltaT) 发生变化,便执行 ModelInit。因此,这些块应该仅在 DeltaT 为常量的一种 TimingMode 下运行。
- TimingMode = 0(周期性),在周期性任务中执行这些功能块时
- TimingMode = 1(过采样)
无论在哪种情况下,如果周期性任务的时间动态变化,或者 OversampleDT 动态变化,该块便执行 ModelInit。
由于 DeltaT 中存在抖动,因此不推荐使用下面的 TimingMode 设置:
- TimingMode = 0(周期性),在连续任务或事件任务中执行这些功能块时
- TimingMode = 2(实时采样)
功能块
操作数 | 类型 | 格式 | 说明 |
CC 标签 | COORDINATED CONTROL | 结构 | CC 结构 |
结构
输入参数 | 数据类型 | 说明 | 有效值和默认值 |
|---|---|---|---|
EnableIn | BOOL | 启用输入。如果为“假”,则功能块不执行,输出也不会更新。 | 默认值 = 真 |
PV | REAL | 经过标定的过程变量输入。该值通常从模拟输入模块中读取。 | 有效值 = 任意浮点值 默认值 = 0.0 |
PVFault | BOOL | PV 不良状况指示器。如果从模拟输入读取 PV,则 PVFault 通常由模拟输入故障状态控制。 如果 PVFault 为“真”,则表示输入模块发生错误,并且会将 Status 中的相应位置位。 | 假 = 状况良好 默认值 = 假 |
PVEUMax | REAL | PV 的最大标定值。对应于过程变量的 100% 量程的 PV 和 SP 的值。 如果 PVEUMax ≤ PVEUMin,则将 Status 中的相应位置位。 | 有效值 = PVEUMin < PVEUMax ≤ 最大正浮点值 默认值 = 100.0 |
PVEUMin | REAL | PV 的最小标定值。对应于过程变量的 0% 量程的 PV 和 SP 的值。 如果 PVEUMax ≤ PVEUMin,则将 Status 中的相应位置位。 | 有效值 = 最大负浮点值 ≤ PVEUMin < PVEUMax 默认值 = 0.0 |
SPProg | REAL | SP 程序值,以 PV 单位标定。当指令处于程序控制模式时,SP 设置为此值。 | 有效值 = SPLLimit 到 SPHLimit 默认值 = 0.0 |
SPOper | REAL | SP 操作员值,以 PV 单位标定。在操作员控制模式下,SP 设置为此值。 如果 SPProg 或 SPOper 的值 < SPLLimit 或 > SPHLimit,则将 Status 中的相应位置位,并限制 SP 的值。 | 有效值 = SPLLimit 到 SPHLimit 默认值 = 0.0 |
SPHLimit | REAL | SP 上限值,以 PV 单位标定。 如果 SPHLimit < SPLLimit 或 SPHLimit > PVEUMax,则将 Status 中的相应位置位。 | 有效值 = SPLLimit 到 PVEUMax 默认值 = 100.0 |
SPLLimit | REAL | SP 下限值,以 PV 单位标定。 如果 SPLLimit < PVEUMin 或 SPHLimit < SPLLimit,则将 Status 中的相应位置位,并使用 SPLLimit 的值限制 SP。 | 有效值 = PVEUMin 到 SPHLimit 默认值 = 0.0 |
CV1Fault | BOOL | 控制变量 1 不良状况指示器。如果 CV1EU 控制模拟输出,则 CV1Fault 通常由该模拟输出的故障状态引起。 如果 CV1Fault 为 TRUE,则表示输出模块发生错误,并且置位 Status 中的相应位。 | 默认值 = 假 假 = 状况良好 |
CV2Fault | BOOL | 控制变量 2 不良状况指示器。如果 CV2EU 控制模拟输出,则 CV2Fault 通常来自于模拟输出的故障状态。 如果 CV2Fault 为“真”(TRUE),则指示输出模块存在错误,并且置位 Status 中的相应位。 | 默认值 = 假 假 = 状况良好 |
CV3Fault | BOOL | 控制变量 3 不良状况指示器。如果 CV3EU 控制模拟输出,则 CV3Fault 通常来自于模拟输出的故障状态。 如果 CV3Fault 为“真”(TRUE),则指示输出模块存在错误,并且置位 Status 中的相应位。 | 默认值 = 假 假 = 状况良好 |
CV1InitReq | BOOL | CV1 初始化请求。当为“真”时,会将 CV1EU 设置为 CV1InitValue 的值。该信号通常由受控于 CV1EU 的模拟输出模块上的 In Hold 状态控制,或者从次级回路的 InitPrimary 输出获得。 | 默认值 = 假 |
CV2InitReq | BOOL | CV2 初始化请求。当为“真”(TRUE) 时,会将 CV2EU 设置为 CV2InitValue 的值。该信号通常由受控于 CV2EU 的模拟输出模块上的 In Hold 状态控制,或者从次级回路的 InitPrimary 输出获得。 | 默认值 = 假 |
CV3InitReq | BOOL | CV3 初始化请求。当为“真”(TRUE) 时,会将 CV3EU 设置为 CV3InitValue 的值。该信号通常由受控于 CV32EU 的模拟输出模块上的 In Hold 状态控制,或者从次级回路的 InitPrimary 输出获得。 | 默认值 = 假 |
CV1InitValue | REAL | CV1EU 初始化值,以 CV1EU 单位标定。当 CV1Initializing 为“真”(TRUE) 时,将 CV1EU 设为等于 CV1InitValue 并将 CV1 设为等于相应的百分比值。CV1InitValue 通常从受 CV1EU 控制的模拟输出的反馈获取,或者从次级回路的设置点得出。 当 CVFaulted 或 CVEUSpanInv 为“真”时,将禁用指令初始化。 | 有效值 = 任意浮点值 默认值 = 0.0 |
CV2InitValue | REAL | CV2EU 初始化值,以 CV2EU 单位标定。当 CV2Initializing 为 TRUE 时,将 CV2EU 设为等于 CV2InitValue 并且 CV2 设为相应的百分比值。CV2InitValue 通常来自于受 CV2EU 控制的模拟输出的反馈,或者次级回路的设置点。 当 CVFaulted 或 CVEUSpanInv 为“真”时,将禁用指令初始化。 | 有效值 = 任意浮点值 默认值 = 0.0 |
CV3InitValue | REAL | CV3EU 初始化值,以 CV3EU 单位标定。当 CV3Initializing 为“真”(TRUE) 时,将 CV3EU 设为等于 CV3InitValue 并将 CV3 设为等于相应的百分比值。CV3InitValue 通常来自于受 CV3EU 控制的模拟输出的反馈,或者次级回路的设置点。 当 CVFaulted 或 CVEUSpanInv 为“真”时,将禁用指令初始化。 | 有效值 = 任意浮点值 默认值 = 0.0 |
CV1Prog | REAL | 程序-手动模式下的 CV1 值。在程序控制和手动模式下,CV1 设置为此值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV2Prog | REAL | 程序-手动模式下的 CV2 值。在程序控制和手动模式下,CV2 设置为此值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV3Prog | REAL | 程序-手动模式下的 CV3 值。在程序控制和手动模式下,CV3 设置为此值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV1Oper | REAL | 操作员-手动模式下的 CV1 值。在操作员控制和手动模式下,CV1 设置为此值。如果未处于操作员-手动模式,则在每个功能块执行结束时,将 CV1Oper 设置为 CV1 值。 当 CVManLimiting 为“真”时,如果 CV1Oper 的值 < 0 或 > 100,或者 < CV1LLimit 或 > CV1HLimit,则将 Status 中的相应位置位,并限制 CV 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV2Oper | REAL | 操作员-手动模式下的 CV2 值。在操作员控制和手动模式下时,CV2 设置为此值。如果未处于操作员-手动模式,则在每个功能块执行结束时,将 CV2Oper 设置为 CV2 值。 如果 CV2Oper 的值 < 0 或 > 100,或者当 CVManLimiting 为“真”(TRUE) 时 < CV2LLimit 或 > CV2HLimit,则置位 Status 中的相应位,并限制 CV 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV3Oper | REAL | 操作员-手动模式下的 CV3 值。在操作员控制和手动模式下,CV3 设置为此值。如果未处于操作员-手动模式,则在每个功能块执行结束时,将 CV3Oper 设置为 CV3 值。 如果 CV3Oper 的值 < 0 或 > 100,或者当 CVManLimiting 为“真”(TRUE) 时 < CV3LLimit 或 > CV3HLimit,则置位 Status 中的相应位,并限制 CV 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV1OverrideValue | REAL | 超控模式下的 CV1 值。在超控模式下,CV1 设置为此值。 此值应对应于回路的安全状态输出。 如果 CV1OverrideValue 的值 < 0 或 > 100,则置位 Status 中的相应位,并限制用于 CV 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV2OverrideValue | REAL | 超控模式下的 CV2 值。在超控模式下,CV2 设置为此值。 此值应对应于回路的安全状态输出。 如果 CV2OverrideValue 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV3OverrideValue | REAL | 超控模式下的 CV3 值。在超控模式下,CV3 设置为此值。 此值应对应于回路的安全状态输出。 如果 CV3OverrideValue 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV1TrackValue | REAL | CV1 跟踪值。当启用 CVTrackReq 且 CC 功能块处于手动模式时,将忽略 CV1TrackValue,CC 内部模型将以 CV1Oper 或 CV1Prog 值更新其历史数据。当启用 CVTrackReq 且 CC 功能块处于自动模式时,内部模型将根据 CV1TrackValue 的值更新其历史数据。 这种情况下,CV1 值将可以正常变化,就如同 CC 功能块仍在控制该过程。在多回路选择方案中,如果希望 CC 功能块跟随不同控制算法的输出,则该功能将非常有用,可将控制算法的输出连接到 CV1TrackValue。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV2TrackValue | REAL | CV2 跟踪值。当启用 CVTrackReq 且 CC 功能块处于手动模式时,将忽略 CV2TrackValue,CC 内部模型将以 CV2Oper 或 CV2Prog 值更新其历史数据。当启用 CVTrackReq 且 CC 功能块处于自动模式时,内部模型将根据 CV2TrackValue 的值更新其历史数据。 这种情况下,CV2 值将可以正常变化,就如同 CC 功能块仍在控制该过程。在多回路选择方案中,如果希望 CC 功能块跟随不同控制算法的输出,则该功能将非常有用,可将控制算法的输出连接到 CV2TrackValue。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV3TrackValue | REAL | CV3 跟踪值。当启用 CVTrackReq 且 CC 功能块处于手动模式时,将忽略 CV3TrackValue,CC 内部模型将以 CV3Oper 或 CV3Prog 值更新其历史数据。当启用 CVTrackReq 且 CC 功能块处于自动模式时,内部模型将根据 CV3TrackValue 的值更新其历史数据。 这种情况下,CV3 值将可以正常变化,就如同 CC 功能块仍在控制该过程。在多回路选择方案中,如果希望 CC 功能块跟随不同控制算法的输出,则该功能将非常有用,可将控制算法的输出连接到 CV3TrackValue。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CVManLimiting | BOOL | 限制手动模式请求中的 CV(n),其中,(n) 可以是 1、2 或 3。如果处于手动模式并且 CVManLimiting 为 TRUE,则 CV 由 CV(n)HLimit 和 CV(n)LLimit 值限制。 | 默认值 = 假 |
CV1EUMax | REAL | CV1EU 的最大值。对应于 100% CV1 的 CV1EU 值。如果 CV1EUMax = CV1EUMin,会将 Status 中的相应位置位。 | 有效值 = 任意浮点值 默认值 = 100.0 |
CV2EUMax | REAL | CV2EU 的最大值。对应于 100% CV2 的 CV2EU 值。如果 CV2EUMax = CV2EUMin,则置位 Status 中的相应位。 | 有效值 = 任意浮点值 默认值 = 100.0 |
CV3EUMax | REAL | CV3EU 的最大值。对应于 100% CV3 的 CV3EU 值。如果 CV3EUMax = CV3EUMin,则置位 Status 中的相应位。 | 有效值 = 任意浮点值 默认值 = 100.0 |
CV1EUMin | REAL | CV1EU 的最小值。对应于 0% CV1 的 CV1EU 值。如果 CV1EUMax = CV1EUMin,会将 Status 中的相应位置位。 | 有效值 = 任意浮点值 默认值 = 0.0 |
CV2EUMin | REAL | CV2EU 的最小值。对应于 0% CV2 的 CV2EU 值。如果 CV2EUMax = CV2EUMin,则置位 Status 中的相应位。 | 有效值 = 任意浮点值 默认值 = 0.0 |
CV3EUMin | REAL | CV3EU 的最小值。对应于 0% CV3 的 CV3EU 值。如果 CV3EUMax = CV3EUMin,则置位 Status 中的相应位。 | 有效值 = 任意浮点值 默认值 = 0.0 |
CV1HLimit | REAL | CV1 上限值。该值用于设置 CV1HAlarm 输出。当处于自动模式,或者处于手动模式并且 CVManLimiting 为“真”时,该值也用于对 CV1 进行限制。 如果 CV1HLimit > 100 或 CV1HLimit < CV1LLimit,则将 Status 中的相应位置位。 如果 CV1HLimit < CV1LLimit,则使用 CV1LLimit 的值限制 CV1。 | 有效值 = CV1LLimit < CV1HLimit ≤ 100.0 默认值 = 100.0 |
CV2HLimit | REAL | CV2 上限值。该值用于设置 CV2HAlarm 输出。当处于自动模式,或者处于手动模式并且 CVManLimiting 为“真”(TRUE) 时,该值也用于对 CV2 进行限制。 如果 CV2HLimit > 100 且 CV2HLimit < CV2LLimit,则置位 Status 中的相应位。 如果 CV2HLimit < CV2LLimit,则使用 CV2LLimit 的值限制 CV2。 | 有效值 = CV2LLimit < CV2HLimit ≤ 100.0 默认值 = 100.0 |
CV3HLimit | REAL | CV3 上限值。该值用于设置 CV3HAlarm 输出。当处于自动模式,或者处于手动模式并且 CVManLimiting 为“真”(TRUE) 时,该值也用于对 CV3 进行限制。 如果 CV3HLimit > 100 且 CV3HLimit < CV3LLimit,则置位 Status 中的相应位。 如果 CV3HLimit < CV3LLimit,则使用 CV3LLimit 的值限制 CV3。 | 有效值 = CV3LLimit < CV3HLimit ≤ 100.0 默认值 = 100.0 |
CV1LLimit | REAL | CV1 下限值。该值用于设置 CV1LAlarm 输出。当处于自动模式,或者处于手动模式并且 CVManLimiting 为“真”(TRUE) 时,该值也用于对 CV1 进行限制。 如果 CV1LLimit < 0,则将 Status 中的相应位置位。如果 CV1HLimit < CV1LLimit,则使用 CV1LLimit 的值限制 CV。 | 有效值 = 0.0 ≤ CV1LLimit < CV1HLimit 默认值 = 0.0 |
CV2LLimit | REAL | CV2 下限值。该值用于设置 CV2LAlarm 输出。当处于自动模式,或者处于手动模式并且 CVManLimiting 为“真”(TRUE) 时,该值也用于对 CV2 进行限制。 如果 CV2LLimit < 0,则置位 Status 中的相应位。如果 CV2HLimit < CV2LLimit,则使用 CV2LLimit 的值限制 CV。 | 有效值 = 0.0 ≤ CV2LLimit < CV1HLimit 默认值 = 0.0 |
CV3LLimit | REAL | CV3 下限值。该值用于设置 CV3LAlarm 输出。当处于自动模式,或者处于手动模式并且 CVManLimiting 设置为 TRUE 时,该值也用于对 CV3 进行限制。 如果 CV3LLimit < 0,则置位 Status 中的相应位。如果 CV3HLimit < CV3LLimit,则使用 CVLLimit 的值限制 CV。 | 有效值 = 0.0 ≤ CV3LLimit < CV1HLimit 默认值 = 0.0 |
CV1ROCPosLimit | REAL | CV1 变化率限值,以百分比/秒表示。仅当处于自动模式,或者处于手动模式并且 CVManLimiting 为 TRUE 时,才使用变化率限制。使用零值将会禁用 CV1 ROC 限制。如果 CV1ROCLimit 的值 < 0,则会将 Status 中的相应位置位,并禁用 CV1 ROC 限制。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV2ROCPosLimit | REAL | CV2 变化率限值,以百分比/秒表示。仅当处于自动模式,或者处于手动模式并且 CVManLimiting 为 TRUE 时,才使用变化率限制。该值为零值时,禁用 CV2 ROC 限制。如果 CV2ROCLimit 的值 < 0,则置位 Status 中的相应位,并禁用 CV2 ROC 限制。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV3ROCPosLimit | REAL | CV3 变化率限值,以百分比/秒表示。仅当处于自动模式,或者处于手动模式并且 CVManLimiting 为 TRUE 时,才使用变化率限制。该值为零值时,禁用 CV3 ROC 限制。如果 CV3ROCLimit 的值 < 0,则置位 Status 中的相应位,并禁用 CV3 ROC 限制。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV1ROCNegLimit | REAL | CV1 变化率限值,以百分比/秒表示。仅当处于自动模式,或者处于手动模式并且 CVManLimiting 为 TRUE 时,才使用变化率限制。使用零值将会禁用 CV1 ROC 限制。如果 CV1ROCLimit 的值 < 0,则会将 Status 中的相应位置位,并禁用 CV1 ROC 限制。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV2ROCNegLimit | REAL | CV2 变化率限值,以百分比/秒表示。仅当处于自动模式,或者处于手动模式并且 CVManLimiting 为 TRUE 时,才使用变化率限制。该值为零值时,禁用 CV2 ROC 限制。如果 CV2ROCLimit 的值 < 0,则置位 Status 中的相应位,并禁用 CV2 ROC 限制。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV3ROCNegLimit | REAL | CV3 变化率限值,以百分比/秒表示。仅当处于自动模式,或者处于手动模式并且 CVManLimiting 为 TRUE 时,才使用变化率限制。该值为零值时,禁用 CV3 ROC 限制。如果 CV3ROCLimit 的值 < 0,则置位 Status 中的相应位,并禁用 CV3 ROC 限制。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV1HandFB | REAL | CV1 HandFeedback 值。当处于手动模式下且 CV1HandFBFault 为假(状况良好)时,将 CV1 设置为该值。该值通常来自现场安装的手控/自动站的输出,用于在手控模式下进行无扰动转换。如果 CV1HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制用于 CV1 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV2HandFB | REAL | CV2 HandFeedback 值。当处于手动模式下且 CV2HandFBFault 为“假”(FALSE)(状况良好)时,将 CV2 设置为该值。该值通常来自现场安装的手控/自动站的输出,用于在手控模式下进行无扰动转换。如果 CV2HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV2 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV3HandFB | REAL | CV3 HandFeedback 值。当处于手动模式下且 CV3HandFBFault 为“假”(FALSE)(状况良好)时,将 CV3 设置为该值。该值通常来自现场安装的手控/自动站的输出,用于在手控模式下进行无扰动转换。如果 CV3HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV3 的值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV1HandFBFault | BOOL | CV1HandFB 值不良状况指示器。如果从模拟输入中读取 CV1HandFB 值,则 CV1HandFBFault 通常由模拟输入通道的状态控制。CV1HandFBFault 为真时,指示该输入模块存在错误,并且会将 Status 中的相应位置位。 | 假 = 状况良好 默认值 = 假 |
CV2HandFBFault | BOOL | CV2HandFB 值不良状况指示器。如果从模拟输入中读取 CV2HandFB 值,则 CV2HandFBFault 通常由模拟输入通道的状态控制。如果 CV2HandFBFault 为“真”(TRUE),则指示输入模块存在错误,并且置位 Status 中的相应位。 | 假 = 状况良好 默认值 = 假 |
CV3HANDFBFault | BOOL | CV3HandFB 值不良状况指示器。如果从模拟输入中读取 CV3HandFB 值,则 CV3HandFBFault 通常由模拟输入通道的状态控制。如果 CV3HandFBFault 为“真”(TRUE),则指示输入模块存在错误,并且置位 Status 中的相应位。 | 假 = 状况良好 默认值 = 假 |
CV1Target | REAL | CV1 的目标值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV2Target | REAL | CV2 的目标值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV3Target | REAL | CV3 的目标值。 | 有效值 = 0.0 至 100.0 默认值 = 0.0 |
CV1WindupHIn | BOOL | CV1 积分饱和上限请求。该参数为真时,不允许 CV1 值增加。该信号通常来自次级回路的 CV1WindupHOut 输出。 | 默认值 = 假 |
CV2WindupHIn | BOOL | CV2 积分饱和上限请求。该值为“真”(TRUE) 时,不允许 CV2 值增大。该信号通常来自次级回路的 CV2WindupHOut 输出。 | 默认值 = 假 |
CV3WindupHIn | BOOL | CV3 积分饱和上限请求。该值为“真”(TRUE) 时,不允许 CV3 值增大。该信号通常来自次级回路的 CV3WindupHOut 输出。 | 默认值 = 假 |
CV1WindupLIn | BOOL | CV1 积分饱和下限请求。该参数为真时,不允许 CV1 值减小。该信号通常来自次级回路的 CV1WindupLOut 输出。 | 默认值 = 假 |
CV2WindupLIn | BOOL | CV2 积分饱和下限请求。该值为“真”(TRUE) 时,不允许 CV2 值减小。该信号通常来自次级回路的 CV2WindupLOut 输出。 | 默认值 = 假 |
CV3WindupLIn | BOOL | CV3 积分饱和下限请求。该值为“真”(TRUE) 时,不允许 CV3 值减小。该信号通常来自次级回路的 CV3WindupLOut 输出。 | 默认值 = 假 |
GainEUSpan | BOOL | CVxModelGain 的单位可以表示为 EU 或量程百分数形式。置位时将 ModelGain 表示为 EU,复位时将 ModelGain 表示为量程百分数。 | 默认值 = 0 |
CV1ProcessGainSign | BOOL | 仅用于自动调谐。过程增益符号 (Delta PV/Delta CV1)。 置位指示负过程增益(输出增大会导致 PV 减小)。 复位指示正过程增益(输出增大会导致 PV 增大)。 | 默认值 = 假 |
CV2ProcessGainSign | BOOL | 仅用于自动调谐。过程增益的符号 (Delta PV/Delta CV2)。 置位指示负过程增益(输出增大会导致 PV 减小)。 复位指示正过程增益(输出增大会导致 PV 增大)。 | 默认值 = 假 |
CV3ProcessGainSign | BOOL | 仅用于自动调谐。过程增益的符号 (Delta PV/Delta CV3)。 置位指示负过程增益(输出增大会导致 PV 减小)。 复位指示正过程增益(输出增大会导致 PV 增大)。 | 默认值 = 假 |
ProcessType | DINT | 过程类型选项(1 = 积分,0 = 非积分) | 默认值 = 0 |
CV1ModelGain | REAL | CV1 的内模增益参数。根据过程方向输入正增益或负增益。 | 有效值 = 最大负浮点值 −> 最大正浮点值 默认值 = 0.0 |
CV2ModelGain | REAL | CV2 的内模增益参数。根据过程方向输入正增益或负增益。 | 有效值 = 最大负浮点值 −> 最大正浮点值 默认值 = 0.0 |
CV3ModelGain | REAL | CV3 的内模增益参数。根据过程方向输入正增益或负增益。 | 有效值 = 最大负浮点值 −> 最大正浮点值 默认值 = 0.0 |
CV1ModelTC | REAL | CV1 的内模时间常数,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV2ModelTC | REAL | CV2 的内模时间常数,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV3ModelTC | REAL | CV3 的内模时间常数,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV1ModelDT | REAL | CV1 的内模死区时间,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV2ModelDT | REAL | CV2 的内模死区时间,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV3ModelDT | REAL | CV3 的内模死区时间,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV1RespTC | REAL | 确定 CV1 的控制变量操作速度的调谐参数,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV2RespTC | REAL | 确定 CV2 的控制变量操作速度的调谐参数,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
CV3RespTC | REAL | 确定 CV3 的控制变量操作速度的调谐参数,以秒为单位。 | 有效值 = 0.0 到最大正浮点值 默认值 = 0.0 |
Act1stCV | DINT | 用于补偿 PV-SP 偏差的第一个 CV。 1=CV1、2=CV2、3=CV3 | 有效值 = 1-3 默认值 = 1 |
Act2ndCV | DINT | 用于补偿 PV-SP 偏差的第二个 CV。 1=CV1、2=CV2、3=CV3 | 有效值 = 1-3 默认值 = 2 |
Act3rdCV | DINT | 用于补偿 PV-SP 偏差的第三个 CV。 1=CV1、2=CV2、3=CV3 | 有效值 = 1-3 默认值 = 3 |
Target1stCV | DINT | 要按最高优先级驱动到目标值的 CV。 1=CV1、2=CV2、3=CV3 | 有效值 = 1-3 默认值 = 1 |
Target2ndCV | DINT | 要按第二优先级驱动到目标值的 CV。 1=CV1、2=CV2、3=CV3 | 有效值 = 1-3 默认值 = 2 |
Target3rdCV | DINT | 要按第三优先级驱动到目标值的 CV。 1=CV1、2=CV2、3=CV3 | 有效值 = 1-3 默认值 = 3 |
PVTracking | BOOL | SP 跟踪 PV 请求。设置为真可以使 SP 跟踪 PV。自动模式下忽略该参数。仅当全部的三个输出均处于手动模式时,SP 才跟踪 PV。只要有输出返回到自动模式,PVTracking 立即停止。 | 默认值 = 假 |
CVTrackReq | BOOL | CV 跟踪请求。若设置为真,则在自动调谐设置为“关”时启用 CV 跟踪。手控和超控模式下忽略该参数。 | 默认值 = 假 |
ManualAfterInit | BOOL | 初始化后进入手动模式的请求。 该参数为真时,若 CV(n)Initializing 设置为真,除非当前模式为超控或手控模式,否则相应的 CV(n) 将切换为手动模式,其中 (n) 可以是 1、2 或 3。 当 ManualAfterInit 为假时,CV(n) 模式保持不变。 | 默认值 = 假 |
ProgProgReq | BOOL | 程序发出的程序控制请求。 由用户程序设置为真请求程序控制模式。 如果 ProgOperReq 为真,则忽略该值。如果该值保持为真且 ProgOperReq 为假,则可将功能块锁定在程序控制模式。 当 ProgValueReset 为真时,功能块将输入复位(假)。 | 默认值 = 假 |
ProgOperReq | BOOL | 程序发出的操作员控制请求。 由用户程序设置为真可请求操作员控制模式。 如果该值保持为真,则可将功能块锁定在操作员控制模式。 如果 HandFB 值 < 0 或 > 100,指令将 Status 中的相应位置位,并限制 CV 的值。 | 默认值 = 假 |
ProgCV1AutoReq | BOOL | CV1 的程序-自动模式请求。 由用户程序设置为真可请求自动模式。 如果 CV1HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制用于 CV1 的值。 | 默认值 = 假 |
ProgCV2AutoReq | BOOL | CV2 的程序-自动模式请求。 由用户程序设置为真可请求自动模式。 如果 CV2HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV2 的值。 | 默认值 = 假 |
ProgCV3AutoReq | BOOL | CV3 的程序-自动模式请求。 由用户程序设置为真可请求自动模式。 如果 CV3HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV3 的值。 | 默认值 = 假 |
ProgCV1ManualReq | BOOL | CV1 的程序-手动模式请求。 由用户程序设置为真可请求手动模式。 如果 CV1HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制用于 CV1 的值。 | 默认值 = 假 |
ProgCV2ManualReq | BOOL | CV2 的程序-手动模式请求。 由用户程序设置为真可请求手动模式。 如果 CV2HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV2 的值。 | 默认值 = 假 |
ProgCV3ManualReq | BOOL | CV3 的程序-手动模式请求。 由用户程序设置为真可请求手动模式。 如果 CV3HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV3 的值。 | 默认值 = 假 |
ProgCV1OverrideReq | BOOL | CV1 的程序-超控模式请求。 由用户程序设置为真可请求超控模式。 如果 CV1HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制用于 CV1 的值。 | 默认值 = 假 |
ProgCV2OverrideReq | BOOL | CV2 的程序-超控模式请求。 由用户程序设置为真可请求超控模式。 如果 CV2HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV2 的值。 | 默认值 = 假 |
ProgCV3OverrideReq | BOOL | CV3 的程序-超控模式请求。 由用户程序设置为真可请求超控模式。 如果 CV3HandFB 的值 < 0 或 >100,则置位 Status 中的相应位,并限制 CV3 的值。 | 默认值 = 假 |
ProgCV1HandReq | BOOL | CV1 的程序-手控模式请求。 由用户程序设置为真可请求手控模式。该值通常以数字输入的形式从手控/自动工作站读取。 | 默认值 = 假 |
ProgCV2HandReq | BOOL | CV2 的程序-手控模式请求。 由用户程序设置为真可请求手控模式。该值通常以数字输入的形式从手控/自动工作站读取。 | 默认值 = 假 |
ProgCV3HandReq | BOOL | CV3 的程序-手控模式请求。 由用户程序设置为真可请求手控模式。该值通常以数字输入的形式从手控/自动工作站读取。 | 默认值 = 假 |
OperProgReq | BOOL | 操作员发出的程序控制请求。 由操作员界面设置为 TRUE 可请求程序控制模式。功能块将此参数复位(假)。 | 默认值 = 假 |
OperOperReq | BOOL | 操作员发出的操作员控制请求。 由操作员界面设置为真可请求操作员控制模式。功能块将此参数复位(假)。 | 默认值 = 假 |
OperCV1AutoReq | BOOL | CV1 的操作员-自动模式请求。 由操作员界面设置为真可请求自动模式。功能块将此参数复位(假)。 | 默认值 = 假 |
OperCV2AutoReq | BOOL | CV2 的操作员-自动模式请求。 由操作员界面设置为真可请求自动模式。功能块将此参数复位(假)。 | 默认值 = 假 |
OperCV3AutoReq | BOOL | CV3 的操作员-自动模式请求。 由操作员界面设置为真可请求自动模式。功能块将此参数复位(假)。 | 默认值 = 假 |
OperCV1ManualReq | BOOL | CV1 的操作员-手动模式请求。 由操作员界面设置为真可请求手动模式。功能块将此参数复位(假)。 | 默认值 = 假 |
OperCV2ManualReq | BOOL | CV2 的操作员-手动模式请求。 由操作员界面设置为真可请求手动模式。功能块将此参数复位(假)。 | 默认值 = 假 |
OperCV3ManualReq | BOOL | CV3 的操作员-手动模式请求。 由操作员界面设置为真可请求手动模式。功能块将此参数复位(假)。 | 默认值 = 假 |
ProgValueReset | BOOL | 将程序控制值复位。 该值为真时,Prog_xxx_Req 输入复位(假)。 该值为真且处于程序控制模式下时,将 SPProg 设置为等于 SP,将 CVxProg 设置为等于 CVx。 当 ProgValueReset 为真时,指令将输入复位(假)。 | 默认值 = 假 |
TimingMode | DINT | 选择时基执行模式。 值/说明 0 = 周期性模式 1 = 过采样模式 2 = 实时采样模式 有关时序模式的更多信息,请参见“功能块属性”部分。 | 有效值 = 0 至 2 默认值 = 0 |
OverSampleDT | REAL | 过采样模式的执行时间。 | 有效值 = 0…4194.303 秒 默认值 = 0 |
RTSTime | DINT | 实时采样模式的模块更新周期。 | 有效值 = 1 至 32,767 1 次计数 = 1 ms |
RTSTimeStamp | DINT | 实时采样模式的模块时戳值。 | 有效值 = 0…32,767 (从 32,767 跳回到 0) 1 次计数 = 1 ms |
PVTuneLimit | REAL | 以 PV 单位标定的 PV 调谐限值。当自动调谐正在运行并且预测 PV 值超过此限值时,调谐过程将中止。 | 有效值 = 任意浮点值 默认值 = 0 |
AtuneTimeLimit | REAL | CV 发生阶跃变化后完成自动调谐所需的最长时间。自动调谐时间超出此时间时,调谐将会中止。 | 有效值范围:任意 > 0 的浮点值。 默认值 = 60 分钟 |
NoiseLevel | DINT | PV 的噪声级别估计值,在调谐期间可对该值进行补偿。 可选项包括:0 = 低、1 = 中、2 = 高 | 范围:0…2 默认值 = 1 |
CV1StepSize | REAL | 调谐阶跃测试所用的 CV1 步长(百分比)。步长将直接加到 CV1(不超出上限/下限范围)。 | 范围:-100% … 100% 默认值 = 10% |
CV2StepSize | REAL | 调谐阶跃测试所用的 CV2 步长(百分比)。步长将直接加到 CV2(不超出上限/下限范围)。 | 范围:-100% … 100% 默认值 = 10% |
CV3StepSize | REAL | 调谐阶跃测试所用的 CV3 步长(百分比)。步长将直接加到 CV3(不超出上限/下限范围)。 | 范围:-100% … 100% 默认值 = 10% |
CV1ResponseSpeed | DINT | CV1 所需闭环响应速度。 慢速响应:ResponseSpeed=0 中速响应:ResponseSpeed=1 快速响应:ResponseSpeed=2。 如果 ResponseSpeed 小于 0,则使用慢速响应。如果 ResponseSpeed 大于 2,则使用快速响应。 | 范围:0…2 默认值 = 1 |
CV2ResponseSpeed | DINT | CV2 所需闭环响应速度。 慢速响应:ResponseSpeed=0 中速响应:ResponseSpeed=1 快速响应:ResponseSpeed=2。 如果 ResponseSpeed 小于 0,则使用慢速响应。如果 ResponseSpeed 大于 2,则使用快速响应。 | 范围:0…2 默认值 = 1 |
CV3ResponseSpeed | DINT | CV3 所需闭环响应速度。 慢速响应:ResponseSpeed=0 中速响应:ResponseSpeed=1 快速响应:ResponseSpeed=2。 如果 ResponseSpeed 小于 0,则使用慢速响应。如果 ResponseSpeed 大于 2,则使用快速响应。 | 范围:0…2 默认值 = 1 |
CV1ModelInit | BOOL | CV1 内模初始化开关。请参考“CC 功能块调谐”中的“CC 功能块模型初始化”主题。 | 默认值 = 假 |
CV2ModelInit | BOOL | CV2 内模初始化开关。请参考“CC 功能块调谐”中的“CC 功能块模型初始化”主题。 | 默认值 = 假 |
CV3ModelInit | BOOL | CV3 内模初始化开关。请参考“CC 功能块调谐”中的“CC 功能块模型初始化”主题。 | 默认值 = 假 |
Factor | REAL | 非积分模型近似因子。仅用于积分过程类型。 | 默认值 = 100 |
AtuneCV1Start | BOOL | CV1 的自动调谐启动请求。该值为真时,启动 CV1 输出的自动调谐。如果 CV1 未处于手动模式,则忽略该值。功能块将该输入复位(假)。 | 默认值 = 假 |
AtuneCV2Start | BOOL | CV2 的自动调谐启动请求。该值为真时,启动 CV2 输出的自动调谐。如果 CV2 未处于手动模式,则忽略该值。功能块将该输入复位(假)。 | 默认值 = 假 |
AtuneCV3Start | BOOL | CV3 的自动调谐启动请求。该值为真时,启动 CV3 输出的自动调谐。如果 CV3 未处于手动模式,则忽略该值。功能块将该输入复位(假)。 | 默认值 = 假 |
AtuneCV1UseModel | BOOL | CV1 的自动调谐模型使用请求。该值为真时,以计算出的自动调谐模型参数替换当前模型参数。功能块将该输入参数复位(假)。 | 默认值 = 假 |
AtuneCV2UseModel | BOOL | CV2 的自动调谐模型使用请求。该值为真时,以计算出的自动调谐模型参数替换当前模型参数。功能块将该输入参数复位(假)。 | 默认值 = 假 |
AtuneCV3UseModel | BOOL | CV3 的自动调谐模型使用请求。该值为真时,以计算出的自动调谐模型参数替换当前模型参数。功能块将该输入参数复位(假)。 | 默认值 = 假 |
AtuneCV1Abort | BOOL | CV1 的自动调谐中止请求。该值为真时,中止 CV1 输出的自动调谐。功能块将该输入参数复位(假)。 | 默认值 = 假 |
AtuneCV2Abort | BOOL | CV2 的自动调谐中止请求。该值为真时,中止 CV2 输出的自动调谐。功能块将该输入参数复位(假)。 | 默认值 = 假 |
AtuneCV3Abort | BOOL | CV3 的自动调谐中止请求。该值为真时,中止 CV3 输出的自动调谐。功能块将该输入参数复位(假)。 | 默认值 = 假 |
输出参数 | 数据类型 | 说明 | 有效值和默认值 |
|---|---|---|---|
EnableOut | BOOL | 指示指令是否处于启用状态。如果 CV1EU、CV2EU 或 CV3EU 溢出,则该值设置为假。 | |
CV1EU | REAL | CV1 的标定控制变量输出。使用 CV1EUMax 和 CV1EUMin 标定,其中 CV1EUMax 对应于 100%,CV1EUMin 对应于 0%。此输出通常用于控制模拟输出模块或次级回路。 CV1EU = (CV1 * CV1EUSpan / 100) + CV1EUMin CV1EU 量程计算:CV1EUSpan = (CV1EUMax − CV1EUMin) | |
CV2EU | REAL | CV2 的标定控制变量输出。使用 CV2EUMax 和 CV2EUMin 标定,其中 CV2EUMax 对应于 100%,CV2EUMin 对应于 0%。此输出通常用于控制模拟输出模块或次级回路。 CV2EU = (CV2 * CV2EUSpan / 100) + CV2EUMin CV2EU 量程计算:CV2EUSpan = (CV2EUMax − CV2EUMin) | |
CV3EU | REAL | CV3 的标定控制变量输出。使用 CV3EUMax 和 CV3EUMin 标定,其中 CV3EUMax 对应于 100%,CV3EUMin 对应于 0%。此输出通常用于控制模拟输出模块或次级回路。 CV3EU = (CV3 * CV3EUSpan / 100) + CV3EUMin CV3EU 量程计算:CV3EUSpan = (CV3EUMax − CV3EUMin) | |
CV1 | REAL | 控制变量 1 输出。此值始终以 0…100% 表示。当处于自动模式下或者处于手动模式下且 CVManLimiting 为真时,CV1 介于 CV1HLimit 和 CV1LLimit 之间;否则,介于 0 和 100% 之间。 | |
CV2 | REAL | 控制变量 2 输出。此值始终以 0…100% 表示。当处于自动模式下或者处于手动模式下且 CVManLimiting 为“真”(TRUE) 时,CV2 介于 CV2HLimit 和 CV2LLimit 之间;否则,介于 0 和 100% 之间。 | |
CV3 | REAL | 控制变量 3 输出。此值始终以 0…100% 表示。当处于自动模式下或者处于手动模式下且 CVManLimiting 为“真”(TRUE) 时,CV3 介于 CV3HLimit 和 CV3LLimit 之间;否则,介于 0 和 100% 之间。 | |
DeltaCV1 | REAL | 当前 CV1 与上一 CV1 之间的差值(当前 CV1 - 上一 CV1)。 | |
DeltaCV2 | REAL | 当前 CV2 与上一 CV2 之间的差值(当前 CV2 - 上一 CV2)。 | |
DeltaCV3 | REAL | 当前 CV3 与上一 CV3 之间的差值(当前 CV3 - 上一 CV3)。 | |
CV1Initializing | BOOL | CV1 的初始化模式指示器。 当 CV1InitReq 或功能块 blockFirstScan 为真,或者 CV1Fault 由真变为假(由不良转为良好)时,该值设置为真。当功能块初始化完毕且 CV1InitReq 不再为真后,CV1Initializing 将设置为假。 | |
CV2nitializing | BOOL | CV2 的初始化模式指示器。 当 CV2InitReq、功能块 blockFirstScan 或 OLCFirstRun 为“真”(TRUE),或者 CV2Fault 由“真”(TRUE) 转换为“假”(FALSE)(由不良转为良好)时,该值设置为“真”(TRUE)。当功能块初始化完毕且 CV2InitReq 不再为“真”(TRUE) 后,CV2Initializing 将设置为“假”(FALSE)。 | |
CV3initializing | BOOL | 当 CV3InitReq、功能块 blockFirstScan 或 OLCFirstRun 为“真”(TRUE),或者 CV3Fault 由“真”(TRUE) 转换为“假”(FALSE)(由不良转为良好)时,该值设置为“真”(TRUE)。当功能块初始化完毕且 CV3InitReq 不再为“真”(TRUE) 后,CV3Initializing 将设置为“假”(FALSE)。 | |
CV1HAlarm | BOOL | CV1 上限报警指示器。计算的 CV1 值 > 100 或 CV1HLimit 时为真。 | |
CV12HAlarm | BOOL | CV2 上限报警指示器。计算的 CV2 值 > 100 或 CV2HLimit 时为“真”(TRUE)。 | |
CV3HAlarm | BOOL | CV3 上限报警指示器。计算的 CV3 值 > 100 或 CV3HLimit 时为“真”(TRUE)。 | |
CV1LAlarm | BOOL | CV1 下限报警指示器。计算的 CV1 值 < 0 或 CV1LLimit 时为真。 | |
CV2LAlarm | BOOL | CV2 下限报警指示器。计算的 CV2 值 < 0 或 CV2LLimit 时为“真”(TRUE)。 | |
CV3LAlarm | BOOL | CV3 下限报警指示器。计算的 CV3 值 < 0 或 CV3LLimit 时为“真”(TRUE)。 | |
CV1ROCPosAlarm | BOOL | CV1 变化率报警指示器。计算的 CV1 变化率超出 CV1ROCPosLimit 时为真。 | |
CV2ROCPosAlarm | BOOL | CV2 变化率报警指示器。计算的 CV2 变化率超出 CV2ROCPosLimit 时为“真”(TRUE)。 | |
CV3ROCPosAlarm | BOOL | CV3 变化率报警指示器。计算的 CV3 变化率超出 CV3ROCPosLimit 时为“真”(TRUE)。 | |
CV1ROCNegAlarm | BOOL | CV1 变化率报警指示器。计算的 CV1 变化率超出 CV1ROCNegLimit 时为“真”(TRUE)。 | |
CV2ROCNegAlarm | BOOL | CV2 变化率报警指示器。计算的 CV2 变化率超出 CV2ROCNegLimit 时为“真”(TRUE)。 | |
CV3ROCNegAlarm | BOOL | CV3 变化率报警指示器。计算的 CV3 变化率超出 CV3ROCNegLimit 时为“真”(TRUE)。 | |
SP | REAL | 当前设置点的值。SP 值用于在自动模式或 PV 跟踪模式下控制 CV,以 PV 单位标定。 | |
SPPercent | REAL | 以 PV 量程百分比表示的 SP 值。 SPPercent = ((SP − PVEUMin ) * 100) / PVSpan。 PV 量程计算:PVSpan = ( PVEUMax − PVEUMin ) | |
SPHAlarm | BOOL | SP 上限报警指示器。当 SP ≥ SPHLimit 时为真。 | |
SPLAlarm | BOOL | SP 下限报警指示器。当 SP ≤ SPLLimit 时为真。 | |
PVPercent | REAL | 以量程百分比表示的 PV。 PVPercent = (( PV − PVEUMin ) * 100) / PVSpan PV 量程计算:PVSpan = ( PVEUMax − PVEUMin ) | |
E | REAL | 过程误差。SP 与 PV 之间的差值,以 PV 单位标定。 | |
EPercent | REAL | 以量程百分比形式表示的误差。 | |
CV1WindupHOut | BOOL | CV1 积分饱和上限指示器。 当达到 SP 上限或 CV1 上限/下限时为真。此信号通常供 WindupHIn 输入使用,用以限制主回路上 CV1 输出的积分饱和。 | |
CV2WindupHOut | BOOL | CV2 积分饱和上限指示器。 当达到 SP 上限或 CV2 上限/下限时为“真”(TRUE)。此信号通常供 WindupHIn 输入使用,用以限制主回路上 CV2 输出的积分饱和。 | |
CV3WindupHOut | BOOL | CV3 积分饱和上限指示器。 当达到 SP 上限或 CV3 上限/下限时为“真”(TRUE)。此信号通常供 WindupHIn 输入使用,用以限制主回路上 CV3 输出的积分饱和。 | |
CV1WindupLOut | BOOL | CV1 积分饱和下限指示器。 当达到 SP 或 CV1 上限/下限时为真。此信号通常供 WindupLIn 输入使用,用以限制主回路上 CV1 输出的积分饱和。 | |
CV2WindupLOut | BOOL | CV2 积分饱和下限指示器。 当达到 SP 或 CV2 上限/下限时为“真”(TRUE)。此信号通常供 WindupLIn 输入使用,用以限制主回路上 CV2 输出的积分饱和。 | |
CV3WindupLOut | BOOL | CV3 积分饱和下限指示器。 当达到 SP 或 CV3 上限/下限时为“真”(TRUE)。此信号通常供 WindupLIn 输入使用,用以限制主回路上 CV3 输出的积分饱和。 | |
ProgOper | BOOL | 程序/操作员控制指示器。在程序控制模式下为真 (TRUE)。在操作员控制模式下为假 (FALSE)。 | |
CV1Auto | BOOL | CV1 的自动模式指示器。当 CV1 处于自动模式时为真。 | |
CV2Auto | BOOL | CV2 的自动模式指示器。当 CV2 处于自动模式时为“真”(TRUE)。 | |
CV2Auto | BOOL | CV3 的自动模式指示器。当 CV3 处于自动模式时为“真”(TRUE)。 | |
CV1Manual | BOOL | CV1 的手动模式指示器。当 CV1 处于手动模式时为真。 | |
CV2Manual | BOOL | CV2 的手动模式指示器。当 CV2 处于手动模式时为“真”(TRUE)。 | |
CV3Manual | BOOL | CV3 的手动模式指示器。当 CV3 处于手动模式时为“真”(TRUE)。 | |
CV1Override | BOOL | CV1 的超控模式指示器。当 CV1 处于超控模式时为真。 | |
CV2Override | BOOL | CV2 的超控模式指示器。当 CV2 处于超控模式时为“真”(TRUE)。 | |
CV3Override | BOOL | CV3 的超控模式指示器。当 CV3 处于超控模式时为“真”(TRUE)。 | |
CV1Hand | BOOL | CV1 的手控模式指示器。当 CV1 处于手控模式时为真。 | |
CV2Hand | BOOL | CV2 的手控模式指示器。当 CV2 处于手控模式时为“真”(TRUE)。 | |
CV3Hand | BOOL | CV3 的手控模式指示器。当 CV3 处于手控模式时为“真”(TRUE)。 | |
DeltaT | REAL | 两次更新间隔的时间(秒)。 | |
CV1StepSizeUsed | REAL | 调谐中使用的实际 CV1 步长。 | |
CV2StepSizeUsed | REAL | 调谐中使用的实际 CV2 步长。 | |
CV3StepSizeUsed | REAL | 调谐中使用的实际 CV3 步长。 | |
CV1GainTuned | REAL | 调谐完毕后计算出的 CV1 内模增益值。 | |
CV2GainTuned | REAL | 调谐完毕后计算出的 CV2 内模增益值。 | |
CV3GainTuned | REAL | 调谐完毕后计算出的 CV3 内模增益值。 | |
CV1TCTuned | REAL | 调谐完毕后计算出的 CV1 内模时间常数。 | |
CV2TCTuned | REAL | 调谐完毕后计算出的 CV2 内模时间常数。 | |
CV3TCTuned | REAL | 调谐完毕后计算出的 CV3 内模时间常数。 | |
CV1DTTuned | REAL | 调谐完毕后计算出的 CV1 内模死区时间。 | |
CV2DTTuned | REAL | 调谐完毕后计算出的 CV2 内模死区时间。 | |
CV3DTTuned | REAL | 调谐完毕后计算出的 CV3 内模死区时间。 | |
CV1RespTCTunedS | REAL | 调谐完毕后计算出的 CV1 慢速响应速度下的控制变量时间常数。 | |
CV2RespTCTunedS | REAL | 调谐完毕后计算出的 CV2 慢速响应速度下的控制变量时间常数。 | |
CV3RespTCTunedS | REAL | 调谐完毕后计算出的 CV3 慢速响应速度下的控制变量时间常数。 | |
CV1RespTCTunedM | REAL | 调谐完毕后计算出的 CV1 中速响应速度下的控制变量时间常数。 | |
CV2RespTCTunedM | REAL | 调谐完毕后计算出的 CV2 中速响应速度下的控制变量时间常数。 | |
CV3RespTCTunedM | REAL | 调谐完毕后计算出的 CV3 中速响应速度下的控制变量时间常数。 | |
CV1RespTCTunedF | REAL | 调谐完毕后计算出的 CV1 快速响应速度下的控制变量时间常数。 | |
CV2RespTCTunedF | REAL | 调谐完毕后计算出的 CV2 快速响应速度下的控制变量时间常数。 | |
CV3RespTCTunedF | REAL | 调谐完毕后计算出的 CV3 快速响应速度下的控制变量时间常数。 | |
AtuneCV1On | BOOL | 启动 CV1 的自动调谐后设置为真。 | |
AtuneCV2On | BOOL | 启动 CV2 的自动调谐后设置为真。 | |
AtuneCV3On | BOOL | 启动 CV3 的自动调谐后设置为真。 | |
AtuneCV1Done | BOOL | CV1 的自动调谐成功完成后设置为真。 | |
AtuneCV2Done | BOOL | CV2 的自动调谐成功完成后设置为真。 | |
AtuneCV3Done | BOOL | CV3 的自动调谐成功完成后设置为真。 | |
AtuneCV1Aborted | BOOL | 当 CV1 的自动调谐由用户中止,或者因自动调谐过程中出错而中止时,设置为真。 | |
AtuneCV2Aborted | BOOL | 当 CV2 的自动调谐由用户中止,或者因自动调谐过程中出错而中止时,设置为真。 | |
AtuneCV3Aborted | BOOL | 当 CV3 的自动调谐由用户中止,或者因自动调谐过程中出错而中止时,设置为真。 | |
AtuneCV1Status | DINT | 指示 CV1 的调谐状态。 | |
AtuneCV2Status | DINT | 指示 CV2 的调谐状态。 | |
AtuneCV3Status | DINT | 指示 CV3 的调谐状态。 | |
AtuneCV1Fault | BOOL | CV1 的自动调谐产生以下任一故障。 | |
AtuneCV2Fault | BOOL | CV2 的自动调谐产生以下任一故障。 | |
AtuneCV3Fault | BOOL | CV3 的自动调谐产生以下任一故障。 | |
AtuneCV1PVOutOfLimit | BOOL | 在 CV1 自动调谐过程中,PV 或 PV 死区时间步提前预测值超过 PVTuneLimit。该值为真时,CV1 自动调谐过程将中止。 | |
AtuneCV2PVOutOfLimit | BOOL | 在 CV2 自动调谐过程中,PV 或 PV 死区时间步提前预测值超过 PVTuneLimit。该值为真时,CV2 自动调谐过程将中止。 | |
AtuneCV3PVOutOfLimit | BOOL | 在 CV3 自动调谐过程中,PV 或 PV 死区时间步提前预测值超过 PVTuneLimit。该值为真时,CV3 自动调谐过程将中止。 | |
AtuneCV1ModeInv | BOOL | CC 模式在自动调谐开始时并非手动模式,或者在 CV1 自动调谐过程中由手动模式切换为其他模式。该值为真时,CV1 自动调谐不会启动或者将会中止。 | |
AtuneCV2ModeInv | BOOL | CC 模式在自动调谐开始时并非手动模式,或者在 CV2 自动调谐过程中由手动模式切换为其他模式。该值为真时,CV2 自动调谐不会启动或者将会中止。 | |
AtuneCV3ModeInv | BOOL | CC 模式在自动调谐开始时并非手动模式,或者在 CV3 自动调谐过程中由手动模式切换为其他模式。该值为真时,CV3 自动调谐不会启动或者将会中止。 | |
AtuneCV1WindupFault | BOOL | 在 CV1 自动调谐开始时或 CV1 自动调谐期间,CV1WindupHIn 或 CV1WindupLIn 为真。该值为真时,CV1 自动调谐不会启动或者将会中止。 | |
AtuneCV2WindupFault | BOOL | 在 CV1 自动调谐开始时或 CV2 自动调谐期间,CV2WindupHIn 或 CV2WindupLIn 为真。该值为真时,CV2 自动调谐不会启动或者将会中止。 | |
AtuneCV3WindupFault | BOOL | 在 CV3 自动调谐开始时或 CV3 自动调谐期间,CV3WindupHIn 或 CV3WindupLIn 为真。该值为真时,CV3 自动调谐不会启动或者将会中止。 | |
AtuneCV1StepSize0 | BOOL | CV1 自动调谐开始时 CV1StepSizeUsed = 0。该值为真时,CV1 自动调谐不会启动。 | |
AtuneCV2StepSize0 | BOOL | CV2 自动调谐开始时 CV2StepSizeUsed = 0。该值为真时,CV2 自动调谐不会启动。 | |
AtuneCV3StepSize0 | BOOL | CV3 自动调谐开始时 CV3StepSizeUsed = 0。该值为真时,CV3 自动调谐不会启动。 | |
AtuneCV1LimitsFault | BOOL | 在 CV1 自动调谐开始时或 CV1 自动调谐期间,CV1LimitsInv 和 CVManLimiting 为真。该值为真时,CV1 自动调谐不会启动或者将会中止。 | |
AtuneCV2LimitsFault | BOOL | 在 CV2 自动调谐开始时或 CV2 自动调谐期间,CV2LimitsInv 和 CVManLimiting 为真。该值为真时,CV2 自动调谐不会启动或者将会中止。 | |
AtuneCV3LimitsFault | BOOL | 在 CV3 自动调谐开始时或 CV3 自动调谐期间,CV3LimitsInv 和 CVManLimiting 为真。该值为真时,CV3 自动调谐不会启动或者将会中止。 | |
AtuneCV1InitFault | BOOL | 在 CV1 自动调谐开始时或 CV1 自动调谐期间,CV1Initializing 为真。该值为真时,CV1 自动调谐不会启动或者将会中止。 | |
AtuneCV2InitFault | BOOL | 在 CV2 自动调谐开始时或 CV2 自动调谐期间,CV2Initializing 为真。该值为真时,CV2 自动调谐不会启动或者将会中止。 | |
AtuneCV3InitFault | BOOL | 在 CV3 自动调谐开始时或 CV3 自动调谐期间,CV3Initializing 为真。该值为真时,CV3 自动调谐不会启动或者将会中止。 | |
AtuneCV1EUSpanChanged | BOOL | 在 CV1 自动调谐期间,CV1EUSpan 或 PVEUSpan 发生改变。该值为真时,CV1 自动调谐过程将中止。 | |
AtuneCV2EUSpanChanged | BOOL | 在 CV2 自动调谐期间,CV2EUSpan 或 PVEUSpan 发生改变。该值为真时,CV2 自动调谐过程将中止。 | |
AtuneCV3EUSpanChanged | BOOL | 在 CV3 自动调谐期间,CV3EUSpan 或 PVEUSpan 发生改变。该值为真时,CV3 自动调谐过程将中止。 | |
AtuneCV1Changed | BOOL | CV1Oper(操作员控制模式)或 CV1Prog(程序控制模式)发生改变,或者 CV1 在 CV1 自动调谐期间达到上/下限或 ROC 限制。该值为真时,CV1 自动调谐过程将中止。 | |
AtuneCV2Changed | BOOL | CV2Oper(操作控制模式)或 CV2Prog(程序控制模式)发生改变,或者 CV2 在 CV2 自动调谐期间达到上/下限或 ROC 限制。该值为真时,CV2 自动调谐过程将中止。 | |
AtuneCV3Changed | BOOL | CV3Oper(操作控制模式)或 CV3Prog(程序控制模式)发生改变,或者 CV3 在 CV3 自动调谐期间达到上/下限或 ROC 限制。该值为真时,CV3 自动调谐过程将中止。 | |
AtuneCV1Timeout | BOOL | 自阶跃测试开始起经过的时间长于 AtuneTimeLimit。该值为真时,CV1 自动调谐过程将中止。 | |
AtuneCV2Timeout | BOOL | 自阶跃测试开始起经过的时间长于 AtuneTimeLimit。该值为真时,CV2 自动调谐过程将中止。 | |
AtuneCV3Timeout | BOOL | 自阶跃测试开始起经过的时间长于 AtuneTimeLimit。该值为真时,CV3 自动调谐过程将中止。 | |
AtuneCV1PVNotSettled | BOOL | PV 变化过大而无法进行 CV1 自动调谐。该值为真时,CV1 自动调谐过程将中止。等待 PV 达到更稳定状态再进行 CV1 自动调谐。 | |
AtuneCV2PVNotSettled | BOOL | PV 变化过大而无法进行 CV2 自动调谐。该值为真时,CV2 自动调谐过程将中止。等待 PV 达到更稳定状态再进行 CV2 自动调谐。 | |
AtuneCV3PVNotSettled | BOOL | PV 变化过大而无法进行 CV3 自动调谐。该值为真时,CV3 自动调谐过程将中止。等待 PV 达到更稳定状态再进行 CV3 自动调谐。 | |
Status1 | DINT | 功能块的位映射状态。 | |
Status2 | DINT | 功能块的附加位映射状态。 | |
Status3CV1 | DINT | 功能块的附加位映射 CV1 状态。值为 0 时表示未发生故障。 | |
Status3CV2 | DINT | 功能块的附加位映射 CV2 状态。值为 0 时表示未发生故障。 | |
Status3CV3 | DINT | 功能块的附加位映射 CV3 状态。值为 0 时表示未发生故障。 | |
InstructFault | BOOL | 功能块发生故障。指示 Status1、Status2 和 Status3CV(n) 相应位的状态,其中 (n) 可以是 1、2 或 3。 值为 0 时表示未发生故障。任何可能配置为无效值的参数都必须具有状态参数,来指示其无效状态。 | |
PVFaulted | BOOL | 过程变量 PV 状况不良。 | |
PVSpanInv | BOOL | PV 量程无效,PVEUMax < PVEUMin。 | |
SPProgInv | BOOL | SPProg < SPLLimit 或 > SPHLimit。限制 SP 的值。 | |
SPOperInv | BOOL | SPOper < SPLLimit 或 > SPHLimit。限制 SP 的值。 | |
SPLimitsInv | BOOL | 限值无效:SPLLimit < PVEUMin,SPHLimit > PVEUMax 或 SPHLimit < SPLLimit。如果 SPHLimit < SPLLimit,则将使用 SPLLimit 限制该值。 | |
SampleTimeTooSmall | BOOL | 模型死区时间/DeltaT 必须小于或等于 200。 | |
FactorInv | BOOL | 输入的 Factor 值 < 0。 | |
TimingModeInv | BOOL | 输入的 TimingMode 无效。如果当前模式不是超控或手控模式,则设置为手动模式。 | |
RTSMissed | BOOL | 仅用于实时采样模式。ABS(DeltaT – RTSTime) > 1 毫秒时为真。 | |
RTSTimeInv | BOOL | 输入的 RTSTime 无效。 | |
RTSTimeStampInv | BOOL | RTSTimeStamp 无效。如果当前模式不是超控或手控模式,则设置为手动模式。 | |
DeltaTInv | BOOL | DeltaT 无效。如果当前模式不是超控或手控模式,则设置为手动模式。 | |
CV1Faulted | BOOL | 控制变量 CV1 状况不良。 | |
CV2Faulted | BOOL | 控制变量 CV2 状况不良。 | |
CV3Faulted | BOOL | 控制变量 CV3 状况不良。 | |
CV1HandFBFaulted | BOOL | CV1 HandFB 值状况不良。 | |
CV2HandFBFaulted | BOOL | CV2 HandFB 值状况不良。 | |
CV3HandFBFaulted | BOOL | CV3 HandFB 值状况不良。 | |
CV1ProgInv | BOOL | CV1Prog < 0 或 > 100,或者当 CVManLimiting 为真时,< CV1LLimit 或 > CV1HLimit。将限制 CV1 的值。 | |
CV2ProgInv | BOOL | CV2Prog < 0 或 > 100,或者当 CVManLimiting 为“真”(TRUE) 时,< CV2LLimit 或 > CV2HLimit。限制 CV2 的值。 | |
CV3ProgInv | BOOL | CV3Prog < 0 或 > 100,或者当 CVManLimiting 为“真”(TRUE) 时,< CV3LLimit 或 > CV3HLimit。限制 CV3 的值。 | |
CV1OperInv | BOOL | CV1Oper < 0 或 > 100,或者当 CVManLimiting 为“真”(TRUE) 时,< CV1LLimit 或 > CV1HLimit。将限制 CV1 的值。 | |
CV2OperInv | BOOL | CV2Oper < 0 或 > 100,或者当 CVManLimiting 为真时,< CV2LLimit 或 > CV2HLimit。限制 CV2 的值。 | |
CV3OperInv | BOOL | CV3Oper < 0 或 > 100,或者当 CVManLimiting 为“真”(TRUE) 时,< CV3LLimit 或 > CV3HLimit。限制 CV3 的值。 | |
CV1OverrideValueInv | BOOL | CV1OverrideValue < 0 或 > 100。将限制 CV1 的值。 | |
CV2OverrideValueInv | BOOL | CV2OverrideValue < 0 或 > 100。限制 CV2 的值。 | |
CV3OverrideValueInv | BOOL | CV3OverrideValue < 0 或 > 100。限制 CV3 的值。 | |
CV1TrackValueInv | BOOL | 输入的 CV1TrackValue < 0 或 > 100。将限制 CV1 的值。 | |
CV2TrackValueInv | BOOL | 输入的 CV2TrackValue < 0 或 > 100。限制 CV2 的值。 | |
CV3TrackValueInv | BOOL | 输入的 CV3TrackValue < 0 或 > 100。限制 CV3 的值。 | |
CV1EUSpanInv | BOOL | CV1EU 的量程无效,CV1EUMax 等于 CV1EUMin。 | |
CV2EUSpanInv | BOOL | CV2EU 量程无效,CV2EUMax 等于 CV2EUMin。 | |
CV3EUSpanInv | BOOL | CV3EU 量程无效,CV3EUMax 等于 CV3EUMin。 | |
CV1LimitsInv | BOOL | CV1LLimit < 0、CV1HLimit > 100 或 CV1HLimit <= CV1LLimit。如果 CV1HLimit <= CV1LLimit,则将使用 CV1LLimit 限制 CV1 值。 | |
CV2LimitsInv | BOOL | CV2LLimit < 0、CV2HLimit > 100 或 CV2HLimit <= CV2LLimit。如果 CV2HLimit <= CV2LLimit,则使用 CV2LLimit 限制 CV2。 | |
CV3LimitsInv | BOOL | CV3LLimit < 0、CV3HLimit > 100 或 CV3HLimit <= CV3LLimit。如果 CV3HLimit <= CV3LLimit,则使用 CV3LLimit 限制 CV3。 | |
CV1ROCLimitInv | BOOL | CV1ROCLimit < 0,禁用 CV1 ROC 限制。 | |
CV2ROCLimitInv | BOOL | CV2ROCLimit < 0,禁用 CV2 ROC 限制。 | |
CV3ROCLimitInv | BOOL | CV3ROCLimit < 0,禁用 CV3 ROC 限制。 | |
CV1HandFBInv | BOOL | CV1HandFB < 0 或 > 100。将限制 CV1 的值。 | |
CV2HandFBInv | BOOL | CV2HandFB < 0 或 > 100。限制 CV2 的值。 | |
CV3HandFBInv | BOOL | CV3HandFB < 0 或 > 100。限制 CV3 的值。 | |
CV1ModelGainInv | BOOL | CV1ModelGain 为 1.#QNAN 或 -1.#IND(非数字),或者 ± 1.$(无穷大 ∞)。 | |
CV2ModelGainInv | BOOL | CV2ModelGain 为 1.#QNAN 或 -1.#IND(非数字),或者 ± 1.$(无穷大 ∞)。 | |
CV3ModelGainInv | BOOL | CV3ModelGain 为 1.#QNAN 或 -1.#IND(非数字),或者 ± 1.$(无穷大 ∞)。 | |
CV1ModelTCInv | BOOL | CV1ModelTC < 0。 | |
CV2ModelTCInv | BOOL | CV2ModelTC < 0。 | |
CV3ModelTCInv | BOOL | CV3ModelTC < 0。 | |
CV1ModelDTInv | BOOL | CV1ModelDT < 0。 | |
CV2ModelDTInv | BOOL | CV2ModelDT < 0。 | |
CV3ModelDTInv | BOOL | CV3ModelDT < 0。 | |
CV1RespTCInv | BOOL | CV1RespTC < 0。 | |
CV2RespTCInv | BOOL | CV2RespTC < 0。 | |
CV3RespTCInv | BOOL | CV3RespTC < 0。 | |
CV1TargetInv | BOOL | CV1Target < 0 或 > 100。 | |
CV2TargetInv | BOOL | CV2Target < 0 或 > 100。 | |
CV3TargetInv | BOOL | CV3Target < 0 或 > 100。 |
说明
协调控制是一种基于模型的灵活算法,可用在各种配置中,例如:
- 使用三个控制变量控制一个过程变量
- 热冷分程控制
- 前馈控制
- 区域温度控制
- 约束控制
下面是一个协调控制闭环配置的示例。
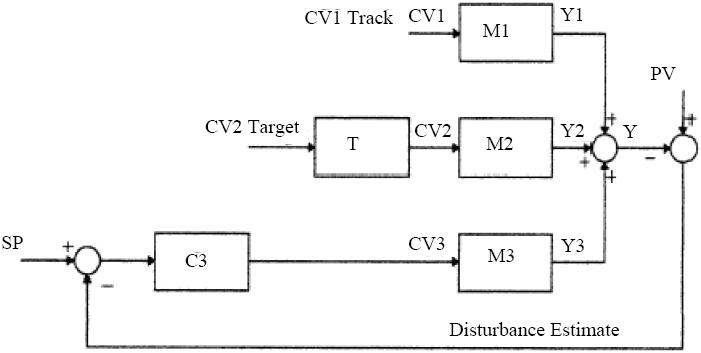
在该示例中,CV1 处于手动模式,CV2 驱动到其目标值,CV3 为主动控制。下表详细描述了该示例。
名称 | 说明 |
|---|---|
CV1 | 处于手动模式 |
CV2 | 驱动到其目标值 (CV2 = Target1stCV) |
CV3 | 主动控制 (CV3 = Act1stCV) |
该示例可以是一个具有前馈功能的冷热控制系统,其中:
- CV1 为前馈;
- CV2 为冷却;
- CV3 为加热。
由于 CV1 处于手动模式,因此无法实现作为最低优先级目标的 CV3 目标值。PV 将通过 CV3 维持在设置点,同时 CV2 将驱动到其目标值(第二优先级目标)。
如果操作员更改 CV1 手动值,则在计算新的 CV3 和 CV2 时,控制变量将考虑该变化量。
M1 | CV1 - 具有死区时间模型的 PV 一阶滞后 |
M2 | CV2 - 具有死区时间模型的 PV 一阶滞后 |
M3 | CV3 - 具有死区时间模型的 PV 一阶滞后 |
T | 目标响应 |
C3 | 基于模型的算法,通过 CV3 控制 PV |
Y1、Y2 和 Y3 | M1、M2 和 M3 的模型输出 |
Y | PV 预测值 |
影响数学状态标志
否
严重/轻微故障
没有特定于此指令的故障。有关操作数相关的故障,请参阅 通用属性。
执行
功能块
条件/状态 | 执行的操作 |
|---|---|
预扫描 | EnableIn 和 EnableOut 位设置为假。 |
Tag.EnableIn 为假 | EnableIn 和 EnableOut 位设置为假。 |
Tag.EnableIn 为真 | EnableIn 和 EnableOut 位设置为真。 指令执行。 |
指令首次运行 | 不适用。 |
指令首次扫描 | 不适用 |
后扫描 | EnableIn 和 EnableOut 位设置为假。 |
结构化文本
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 请参见“功能块”表中的“预扫描”行。 |
正常执行 | 请参见“功能块”表中的“Tag.EnableIn 为真”行。 |
后扫描 | 请参见“功能块”表中的“后扫描”行。 |
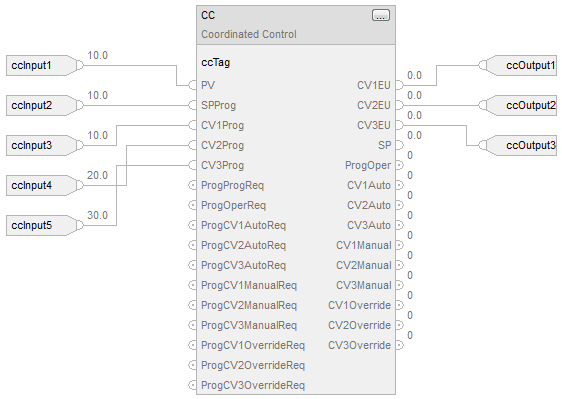
示例
功能块
结构化文本
ccTag.PV := ccInput1;
ccTag.SPProg := ccInput2;
ccTag.CV1Prog := ccInput3;
ccTag.CV2Prog := ccInput4;
ccTag.CV3Prog := ccInput5;
CC(ccTag);
ccOutput1 := ccTag.CV1EU;
ccOutput2 := ccTag.CV2EU;
ccOutput3 := ccTag.CV3EU;
提供反馈