过程重启禁用 (PRI)
此信息适用于 CompactLogix 5380P、ControlLogix 5580P 和 ControlLogix 5590P 控制器。
对于大电机可使用过程重启禁用 (PRI) 指令防止大电机反复启动。大电机在启动时的高电流会导致发热。短时间内持续启动或尝试启动会导致电机绕组过热并损坏电机。
PRI 指令提供了一套基于规则的重启状态模型。请勿使用该指令建立发热模型或者监控发热情况,也不要取代基于传感器的电机监控设备。该指令用于避免电机过压。
可用语言
梯形图
功能块图

结构化文本
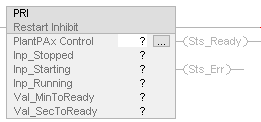
PRI (PRI tag);
操作数
重要提示:
如果其中一个冷或热计时器被设置为 0,则可能会发生意外操作。
配置操作数
操作数 | 类型 | 格式 | 说明 |
|---|---|---|---|
PlantPAx Control | P_RESTART_INHIBIT | 标签 | PRI 结构 |
P_RESTART_INHIBIT_INPUT 结构
公共成员是可通过编程方式访问的标准(可见)标签成员。专用(隐藏)成员在 HMI 面板中使用,无法以编程方式访问。专用成员在公共成员后面的单独表中列出。
公共输入成员 | 数据类型 | 说明 |
|---|---|---|
EnableIn | BOOL | 启用输入 - 系统定义的参数 默认值为真。 |
Inp_Stopped | BOOL | 1 = 确认设备已停止。 默认值为假。 |
Inp_Starting | BOOL | 1 = 确认设备正在启动,表示尝试启动。 默认值为假。 |
Inp_Running | BOOL | 1 = 已确认设备正在运行。 默认值为真。 |
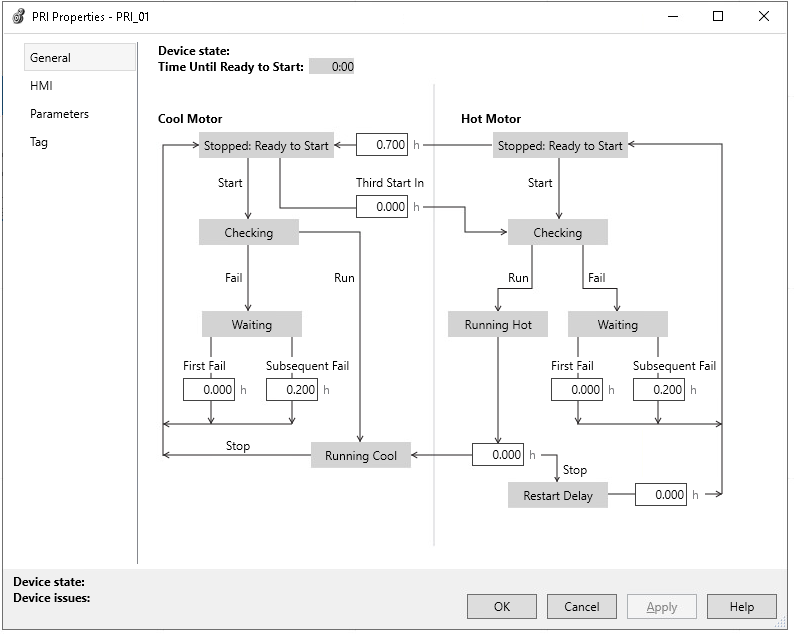
Cfg_ThreeColdStarts | REAL | 允许进行三次冷启动的限定时间(小时)默认值为 0.5。 |
Cfg_FirstFailCold | REAL | 冷电机在首次启动失败后等待启动就绪的时间(小时)默认值为 0.5。 |
Cfg_SubseqFailCold | REAL | 冷电机在第二次启动失败和后续启动失败后等待就绪的时间(小时)默认值为 4.0。 |
Cfg_FirstFailHot | REAL | 热电机在首次启动失败后等待启动就绪的时间(小时)默认值为 0.5。 |
Cfg_SubseqFailHot | REAL | 热电机在第二次启动失败和后续启动失败后等待就绪的时间(小时)默认值为 4.0。 |
Cfg_HotRestartOK | REAL | 热电机在停止后可立即重启所需的运行时间(小时)默认值为 1.0。 |
Cfg_RestartHot | REAL | 热电机在热重启正常 (OK) 时间之前停止后等待的时间(小时)默认值为 1.0。 |
Cfg_HotToCold | REAL | 已停止热电机的冷却时间(小时)默认值为 16.0。 |
Inp_InitializeReq | BOOL | 1 = 请求初始化指令。指令通常在首次运行时进行初始化。需要重新初始化时使用此请求。该指令自动清除该操作数。 默认值为真。 |
公共输出成员 | 数据类型 | 说明 |
|---|---|---|
EnableOut | BOOL | 启用输出 - 系统定义的参数 |
Val_MinToReady | DINT | 启动就绪前仍禁止的分钟数(显示格式为倒计时 mmm:ss)。 |
Val_SecToReady | DINT | 启动就绪前仍禁止的秒数(显示格式为倒计时 mmm:ss)。 |
Sts_bFdbk | SINT | 设备反馈:0 = 无/多个/未知,1 = 已停止,2 = 正在启动,3 = 正在运行。 |
Sts_State | SINT | 用于在 HMI 上突出显示状态图的状态编号。请参见参考手册中的指令帮助或状态图。 |
Sts_Ready | BOOL | 允许设备启动:1 = 启动就绪,0 = 未就绪,禁止启动。 |
Sts_Err | BOOL | 1 = 配置出错: 时间无效。有效值 = 0.0 至 596.52 小时。 |
Sts_Initialized | BOOL | 1 = 指令已初始化。使用 Inp_InitializeReq 重新初始化。 |
操作
PRI 指令具有以下功能:
- 提供基于规则的重启状态模型,并非用于针对电机发热进行建模或监控。
- 显示经过多长时间后进入就绪状态;时间以分钟和秒为单位显示,并且可配置。此就绪状态也可独立于时间显示。
- “就绪”状态由冷启动就绪时间(首次启动)和热启动就绪时间决定。
- 冷启动就绪时间将受首次冷启动失败时间和后续冷启动失败时间制约。
- 热启动就绪时间受首次热启动失败时间、后续冷启动失败时间和热重启延迟时间制约。
HMI 字符串配置
配置 HMI 面板和
Logix Designer
配置对话框的字符串。字符串将设置为标签项的扩展属性。只能在 Logix Designer
应用程序中配置字符串。- 说明
- 图形符号的标签
- 用于 HMI 面板调用的显示库
- 指令名称
- 区域名称
- URL 链接
实现
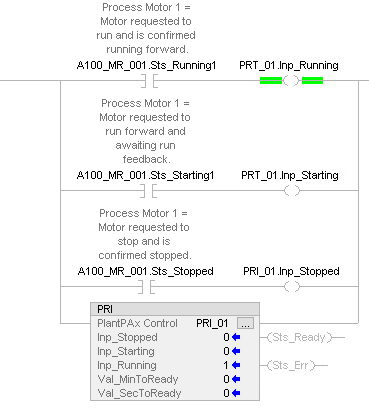
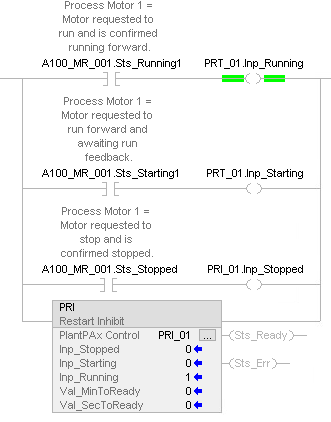
下图显示了在单独分支中将输入条件映射到 Inp_Running、Inp_Starting 和 Inp_Stopped 的正常实现。
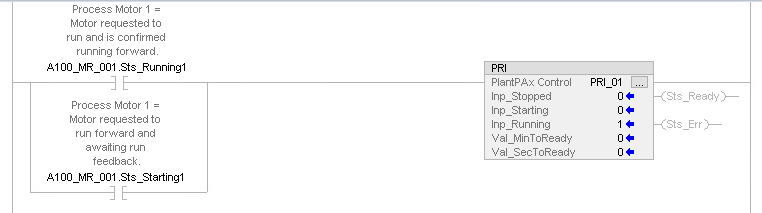
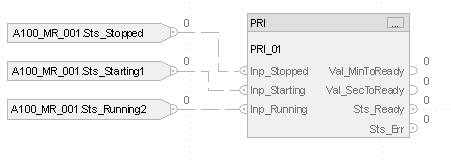
下图显示了使用梯级输入条件将输入条件映射到 PRI 指令的实现。当梯级输入条件为假(EnableIn 为假)时,指令正常执行。要使用梯级输入条件映射方法,请将 Inp_Running 设置为 1(默认值)。
监控 PRI 指令
使用 PlantPAx 过程对象库中的操作员面板进行监控。
影响数学状态标志
编号
严重/轻微故障
没有特定于此指令的故障。请参见“数组索引编制”,了解关于数组索引故障的信息。
执行
梯形图
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 梯级输出条件设置为假。 |
指令首次运行 | 指令正常执行。 |
梯级输入条件为假 | 将梯级输出条件设置为梯级输入条件。 |
梯级输入条件为真 | 将梯级输出条件设置为梯级输入条件。 指令执行。 |
后扫描 | 梯级输出条件设置为假。 |
功能块图
条件/状态 | 执行的操作 |
|---|---|
预扫描 | EnableOut 设置为假。 |
指令首次运行 | 请参阅“梯形图”表中的“指令首次运行”行。 |
指令首次扫描 | 请参阅“功能块图”表中的“指令首次运行”行。 |
EnableIn 为假 | EnableOut 设置为假。 |
EnableIn 为真 | EnableOut 设置为真。 指令执行。 |
后扫描 | EnableIn 和 EnableOut 位设置为假。 |
结构化文本
在结构化文本中,EnableIn 在普通扫描期间始终为真。因此,如果指令处于由逻辑激活的控制路径中,指令将会执行。
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 请参阅“功能块图”表中的“预扫描”行。 |
指令首次运行 | 请参阅“功能块图”表中的“指令首次运行”行。 |
EnableIn 为真 | 请参阅“功能块图”表中的“EnableIn 为真”行。 |
后扫描 | 请参阅“功能块图”表中的“后扫描”行。 |
示例
在本示例中,标签 A100_MR_001 是 PRI 指令监控的电机值。
Inp_Running 连接到“电机正在启动”状态标签 (A100_MR_001.Sts_Running),此标签来自该电机的 P_Motor 指令实例的 Sts_Running 输出 (A100_MR_001)。Inp_Starting 连接到“电机正在启动”状态标签 (A100_MR_001.Sts_Starting),此标签来自该电机的 P_Motor 指令实例的 Sts_Starting 输出 (A100_MR_001)。Inp_Stopped 连接到“电机已停止”状态标签 (A100_MR_001.Sts_Stopped),此标签来自该电机的 P_Motor 指令实例的 Sts_Stopped 输出 (A100_MR_001)。
最后,PRI_01 是一个输出标签,将根据是否允许电机再次启动,利用合适的延迟时间以及运行和启动次数/尝试次数来指示 A100_MR_001 状态。
梯形图
功能块图
结构化文本
PRI_01.Inp_Stopped := A100_MR_001.Sts_Stopped;
PRI_01.Inp_Starting := A100_MR_001.Sts_Stopped;
PRI_01.Inp_Running := A100_MR_001.Sts_Running;
PRI(PRI_01);
提供反馈