过程模拟扇出 (PFO)
此信息适用于 CompactLogix 5380P、ControlLogix 5580P 和 ControlLogix 5590P 控制器。
过程模拟扇出 (PFO) 指令将一个主模拟输出信号发送到多个辅助用户或设备。每个辅助输出都具有可配置的增益、偏移量和钳位限制。
过程模拟扇出 (Process Analog Fanout, PFO) 指令:
- 从主 PID 回路或模拟输出接收受输入控制的变量 (CV)。
- 将变化率限制应用于输入信号。
- 计算多达八个辅助设备的输出。与受比率限制的主输入相比,每个辅助输出都具有自身的比率(斜率)和偏移量(截距)。比率和偏移量是配置的值。
- 对每个输出(辅助)CV 应用最小和最大钳位限制。
- 根据辅助输出的请求位和请求值,对其每个辅助 CV 输出进行初始化。当特定输出 CV 退出初始化时,它使用所配置的获取速率从初始化值过渡到计算得到的值。
- 当所有辅助输出均已请求初始化时,对主输出进行初始化。发送到主输出的初始化值可以是所配置的固定值,也可以是根据 CV1(输出 1)请求的初始化值计算的值(考虑了 CV1 增益和偏移量)。因此,CV1 是优先级输出。
可用语言
梯形图
功能块图
结构化文本
PFO(PFO 标签);
操作数
重要提示:
以下情况下会导致运行出现意外:
- 输出标签操作数被覆盖。
- 结构操作数的成员被覆盖。
- 除非另外指定,否则结构操作数由多条指令共用。
指令中混用数据类型时,需遵从相关的数据转换规则。请参阅 数据转换。
配置操作数
操作数 | 类型 | 格式 | 说明 |
|---|---|---|---|
PlantPAx Control | P_ANALOG_FANOUT | 标签 | 指令正确运行所需的数据结构。 |
P_ANALOG_FANOUT 结构
公共成员是可通过编程方式访问的标准可见标签成员。专用隐藏成员用于 HMI 面板中,无法通过编程方式访问。专用成员在公共成员后面的单独表中列出。
公共输入成员 | 数据类型 | 说明 |
|---|---|---|
EnableIn | BOOL | 启用输入。梯形图:对应于梯级条件。 默认值为真。 |
Inp_InitializeReq | BOOL | 1 = 请求初始化指令。指令通常在首次运行时进行初始化。需要重新初始化时使用此请求。该指令自动清除该操作数。 默认值为真。 |
Inp_CV | REAL | 来自上游块输出的输入 CV(工程单位)。 默认值为 0.0。 |
Inp_CV1InitializationVal | REAL | 来自下游块 #1 的初始化值(输出 1 工程单位)。有效值 = 任意浮点数。 默认值为 0.0。 |
Inp_CV2InitializationVal | REAL | 来自下游块 #2 的初始化值(输出 2 工程单位)。有效值 = 任意浮点数。 默认值为 0.0。 |
Inp_CV3InitializationVal | REAL | 来自下游块 #3 的初始化值(输出 3 工程单位)。有效值 = 任意浮点数。 默认值为 0.0。 |
Inp_CV4InitializationVal | REAL | 来自下游块 #4 的初始化值(输出 4 工程单位)。有效值 = 任意浮点数。 默认值为 0.0。 |
Inp_CV5InitializationVal | REAL | 来自下游块 #5 的初始化值(输出 5 工程单位)。有效值 = 任意浮点数。 默认值为 0.0。 |
Inp_CV6InitializationVal | REAL | 来自下游块 #6 的初始化值(输出 6 工程单位)。有效值 = 任意浮点数。 默认值为 0.0。 |
Inp_CV7InitializationVal | REAL | 来自下游块 #7 的初始化值(输出 7 工程单位)。有效值 = 任意浮点数。 默认值为 0.0。 |
Inp_CV8InitializationVal | REAL | 来自下游块 #8 的初始化值(输出 8 工程单位)。有效值 = 任意浮点数。 默认值为 0.0。 |
Inp_CV1InitializeReq | BOOL | 来自下游块 #1 的初始化请求 1 = 将 Out_CV1 设为 Inp_CV1InitializationVal。 默认值为假。 |
Inp_CV2InitializeReq | BOOL | 来自下游块 #2 的初始化请求 1 = 将 Out_CV2 设为 Inp_CV2InitializationVal。 默认值为假。 |
Inp_CV3InitializeReq | BOOL | 来自下游块 #3 的初始化请求 1 = 将 Out_CV3 设为 Inp_CV3InitializationVal。 默认值为假。 |
Inp_CV4InitializeReq | BOOL | 来自下游块 #4 的初始化请求 1 = 将 Out_CV4 设为 Inp_CV4InitializationVal。 默认值为假。 |
Inp_CV5InitializeReq | BOOL | 来自下游块 #5 的初始化请求 1 = 将 Out_CV5 设为 Inp_CV5InitializationVal。 默认值为假。 |
Inp_CV6InitializeReq | BOOL | 来自下游块 #6 的初始化请求 1 = 将 Out_CV6 设为 Inp_CV6InitializationVal。 默认值为假。 |
Inp_CV7InitializeReq | BOOL | 来自下游块 #7 的初始化请求 1 = 将 Out_CV7 设为 Inp_CV7InitializationVal。 默认值为假。 |
Inp_CV8InitializeReq | BOOL | 来自下游块 #8 的初始化请求 1 = 将 Out_CV8 设为 Inp_CV8InitializationVal。 默认值为假。 |
Cfg_HasCV2 | BOOL | 1 = 输出 CV #2 已连接。 默认值为真。 |
Cfg_HasCV3 | BOOL | 1 = 输出 CV #3 已连接。 默认值为假。 |
Cfg_HasCV4 | BOOL | 1 = 输出 CV #4 已连接。 默认值为假。 |
Cfg_HasCV5 | BOOL | 1 = 输出 CV #5 已连接。 默认值为假。 |
Cfg_HasCV6 | BOOL | 1 = 输出 CV #6 已连接。 默认值为假。 |
Cfg_HasCV7 | BOOL | 1 = 输出 CV #7 已连接。 默认值为假。 |
Cfg_HasCV8 | BOOL | 1 = 输出 CV #8 已连接。 默认值为假。 |
Cfg_FixedInitializationVal | REAL | 固定初始化值(采用 Inp_CV 工程单位),Cfg_UseFixedInitialization = 1 时使用。有效值 = 任意浮点数。 默认值为 0.0。 |
Cfg_UseFixedInitialization | BOOL | 1 = 使用 Cfg_UseFixedInitialization 初始化主项,0 = 使用 Inp_CV1InitializationVal。 默认值为假。 |
Cfg_ShedHold | BOOL | 1 = 在 Inf/NaN 输入上保持输出,0 = 始终复制 Inf/NaN。 默认值为假。 |
Cfg_HasMoreObj | BOOL | 1 = 通知 HMI 可使用包含更多信息的对象。 默认值为假。 |
Cfg_HasCVNav | BOOL | 1 = 通知 HMI 允许导航到所连接的 CV 对象。 默认值为假。 |
Cfg_HasNav | SINT | 设置位指示启用的导航按钮。0=CV1、1=CV2、...7=CV8。 默认值为 0。 |
Cfg_CVEUMin | REAL | 以工程单位表示的输入 CV 最小值(用于缩放)。有效值 = 任何不等于 Cfg_CVEUMax 的浮点数。 默认值为 0.0。 |
Cfg_CVEUMax | REAL | 以工程单位表示的输入 CV 最大值(用于缩放)。有效值 = 任何不等于 Cfg_CVEUMin 的浮点数。 默认值为 100.0。 |
Cfg_CVLoLim | REAL | 输入 CV 最小值,钳位下限(Inp 工程单位)。有效值 = 任何小于或等于 Cfg_CVHiLim 的浮点数。 默认值为 0.0。 |
Cfg_CVHiLim | REAL | 输入 CV 最大值,钳位上限(Inp 工程单位)。有效值 = 任何大于或等于 Cfg_CVLoLim 的浮点数。 默认值为 100.0。 |
Cfg_CVRoCLim | REAL | 程序输入 CV 变化率限制(增大或减小)的设置(Inp 工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 0.0。 |
Cfg_CV1Ratio | REAL | CV1 比率的配置(mx+b 中的 m)。有效值 = 任意浮点数。 默认值为 -2.0。 |
Cfg_CV1Offset | REAL | CV1 偏移量的配置(mx+b 中的 b)。有效值 = 任意浮点数。 默认值为 100.0。 |
Cfg_CV1LoLim | REAL | 以工程单位表示的输出 CV #1 最小值(用于钳位)。有效值 = 任意浮点数,Cfg_CV1LoLim<= Cfg_CV1HiLim。 默认值为 0.0。 |
Cfg_CV1HiLim | REAL | 以工程单位表示的输出 CV #1 最大值(用于钳位)。有效值 = 任意浮点数,Cfg_CV1HiLim>= Cfg_CV1LoLim。 默认值为 100.0。 |
Cfg_CV1TakeupRate | REAL | Inp_CV1InitializeReq = 0 之后,CV1 发生偏置的速率(工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 1.0。 |
Cfg_CV2Ratio | REAL | CV2 比率的配置(mx+b 中的 m)。有效值 = 任意浮点数。 默认值为 2.0。 |
Cfg_CV2Offset | REAL | CV2 偏移量的配置(mx+b 中的 b)。有效值 = 任意浮点数。 默认值为 -100.0。 |
Cfg_CV2LoLim | REAL | 以工程单位表示的输出 CV #2 最小值(用于钳位)。有效值 = 任意浮点数,Cfg_CV2LoLim<= Cfg_CV2HiLim。 默认值为 0.0。 |
Cfg_CV2HiLim | REAL | 以工程单位表示的输出 CV #2 最大值(用于钳位)。有效值 = 任意浮点数,Cfg_CV2HiLim>= Cfg_CV2LoLim。 默认值为 100.0。 |
Cfg_CV2TakeupRate | REAL | Inp_CV2InitializeReq = 0 之后,CV2 发生偏置的速率(工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 1.0。 |
Cfg_CV3Ratio | REAL | CV3 比率的配置(mx+b 中的 m)。有效值 = 任意浮点数。 默认值为 1.0。 |
Cfg_CV3Offset | REAL | CV3 偏移量的配置(mx+b 中的 b)。有效值 = 任意浮点数。 默认值为 0.0。 |
Cfg_CV3LoLim | REAL | 以工程单位表示的输出 CV #3 最小值(用于钳位)。有效值 = 任意浮点数,Cfg_CV3LoLim<= Cfg_CV3HiLim。 默认值为 0.0。 |
Cfg_CV3HiLim | REAL | 以工程单位表示的输出 CV #3 最大值(用于钳位)。有效值 = 任意浮点数,Cfg_CV3HiLim> = Cfg_CV3LoLim。 默认值为 100.0。 |
Cfg_CV3TakeupRate | REAL | Inp_CV3InitializeReq = 0 之后,CV3 发生偏置的速率(工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 1.0。 |
Cfg_CV4Ratio | REAL | CV4 比率的配置(mx+b 中的 m)。有效值 = 任意浮点数。 默认值为 1.0。 |
Cfg_CV4Offset | REAL | CV4 偏移量的配置(mx+b 中的 b)。有效值 = 任意浮点数。 默认值为 0.0。 |
Cfg_CV4LoLim | REAL | 以工程单位表示的输出 CV #4 最小值(用于钳位)。有效值 = 任意浮点数,Cfg_CV4LoLim<= Cfg_CV4HiLim。 默认值为 0.0。 |
Cfg_CV4HiLim | REAL | 以工程单位表示的输出 CV #4 最大值(用于钳位)。有效值 = 任意浮点数,Cfg_CV4HiLim>= Cfg_CV4LoLim。 默认值为 100.0。 |
Cfg_CV4TakeupRate | REAL | Inp_CV4InitializeReq = 0 之后,CV4 发生偏置的速率(工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 1.0。 |
Cfg_CV5Ratio | REAL | CV5 比率的配置(mx+b 中的 m)。有效值 = 任意浮点数。 默认值为 1.0。 |
Cfg_CV5Offset | REAL | CV5 偏移量的配置(mx+b 中的 b)。有效值 = 任意浮点数。 默认值为 0.0。 |
Cfg_CV5LoLim | REAL | 以工程单位表示的输出 CV #5 最小值(用于钳位)。有效值 = 任意浮点数,Cfg_CV5LoLim<= Cfg_CV5HiLim。 默认值为 0.0。 |
Cfg_CV5HiLim | REAL | 以工程单位表示的输出 CV #5 最大值(用于钳位)。有效值 = 任意浮点数,Cfg_CV5HiLim>= Cfg_CV5LoLim。 默认值为 100.0。 |
Cfg_CV5TakeupRate | REAL | Inp_CV5InitializeReq = 0 之后,CV5 发生偏置的速率(工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 1.0。 |
Cfg_CV6Ratio | REAL | CV6 比率的配置(mx+b 中的 m)。有效值 = 任意浮点数。 默认值为 1.0。 |
Cfg_CV6Offset | REAL | CV6 偏移量的配置(mx+b 中的 b)。有效值 = 任意浮点数。 默认值为 0.0。 |
Cfg_CV6LoLim | REAL | 以工程单位表示的输出 CV #6 最小值(用于钳位)。有效值 = 任意浮点数,Cfg_CV6LoLim<= Cfg_CV6HiLim。 默认值为 0.0。 |
Cfg_CV6HiLim | REAL | 以工程单位表示的输出 CV #6 最大值(用于钳位)。有效值 = 任意浮点数,Cfg_CV6HiLim>= Cfg_CV6LoLim。 默认值为 100.0。 |
Cfg_CV6TakeupRate | REAL | Inp_CV6InitializeReq = 0 之后,CV6 发生偏置的速率(工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 1.0。 |
Cfg_CV7Ratio | REAL | CV7 比率的配置(mx+b 中的 m)。有效值 = 任意浮点数。 默认值为 1.0。 |
Cfg_CV7Offset | REAL | CV7 偏移量的配置(mx+b 中的 b)。有效值 = 任意浮点数。 默认值为 0.0。 |
Cfg_CV7LoLim | REAL | 以工程单位表示的输出 CV #7 最小值(用于钳位)。有效值 = 任意浮点数,Cfg_CV7LoLim<= Cfg_CV7HiLim。 默认值为 0.0。 |
Cfg_CV7HiLim | REAL | 以工程单位表示的输出 CV #7 最大值(用于钳位)。有效值 = 任意浮点数,Cfg_CV7HiLim>= Cfg_CV7LoLim。 默认值为 100.0。 |
Cfg_CV7TakeupRate | REAL | Inp_CV7InitializeReq = 0 之后,CV7 发生偏置的速率(工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 1.0。 |
Cfg_CV8Ratio | REAL | CV8 比率的配置(mx+b 中的 m)。有效值 = 任意浮点数。 默认值为 1.0。 |
Cfg_CV8Offset | REAL | CV8 偏移量的配置(mx+b 中的 b)。有效值 = 任意浮点数。 默认值为 0.0。 |
Cfg_CV8LoLim | REAL | 以工程单位表示的输出 CV #8 最小值(用于钳位)。有效值 = 任意浮点数,Cfg_CV8LoLim<= Cfg_CV8HiLim。 默认值为 0.0。 |
Cfg_CV8HiLim | REAL | 以工程单位表示的输出 CV #8 最大值(用于钳位)。有效值 = 任意浮点数,Cfg_CV8HiLim>= Cfg_CV8LoLim。 默认值为 100.0。 |
Cfg_CV8TakeupRate | REAL | Inp_CV8InitializeReq = 0 之后,CV8 发生偏置的速率(工程单位/秒)。有效值 = 0.0 到最大正浮点数。 默认值为 1.0。 |
Cfg_CVDecPlcs | SINT | CV 显示的小数位数 (0...6)。 默认值为 0。 |
公共输出成员 | 数据类型 | 说明 |
|---|---|---|
EnableOut | BOOL | 启用输出。此输出状态始终反映 EnableIn 输入状态。 |
Out_CV1 | REAL | 到下游块 #1 的输出(输出 1 工程单位)。 |
Out_CV2 | REAL | 到下游块 #2 的输出(输出 2 工程单位)。 |
Out_CV3 | REAL | 到下游块 #3 的输出(输出 3 工程单位)。 |
Out_CV4 | REAL | 到下游块 #4 的输出(输出 4 工程单位)。 |
Out_CV5 | REAL | 到下游块 #5 的输出(输出 5 工程单位)。 |
Out_CV6 | REAL | 到下游块 #6 的输出(输出 6 工程单位)。 |
Out_CV7 | REAL | 到下游块 #7 的输出(输出 7 工程单位)。 |
Out_CV8 | REAL | 到下游块 #8 的输出(输出 8 工程单位)。 |
Out_CVInitializationVal | REAL | 到上游块的初始化值(Inp_CV 工程单位)。 |
Out_CVInitializeReq | BOOL | 对上游块的初始化请求(1 = 初始化)。 |
Val_CVEUMin | REAL | 最小缩放范围 = minimum (Cfg_CVEUMin, Cfg_CVEUMax)。 |
Val_CVEUMax | REAL | 最大缩放范围 = maximum (Cfg_CVEUMin, Cfg_CVEUMax)。 |
Val_InpCV | REAL | Inp_CV 值,未钳位或过渡(工程单位)。 |
Val_CV | REAL | 钳位和过渡后的 CV 值(工程单位)。 |
Val_MinCVIn1 | REAL | 最小 CV1 输出时的输入 CV(供 HMI 使用)。 |
Val_MaxCVIn1 | REAL | 最大 CV1 输出时的输入 CV(供 HMI 使用)。 |
Val_MinCVIn2 | REAL | 最小 CV2 输出时的输入 CV(供 HMI 使用)。 |
Val_MaxCVIn2 | REAL | 最大 CV2 输出时的输入 CV(供 HMI 使用)。 |
Val_MinCVIn3 | REAL | 最小 CV3 输出时的输入 CV(供 HMI 使用)。 |
Val_MaxCVIn3 | REAL | 最大 CV3 输出时的输入 CV(供 HMI 使用)。 |
Val_MinCVIn4 | REAL | 最小 CV4 输出时的输入 CV(供 HMI 使用)。 |
Val_MaxCVIn4 | REAL | 最大 CV4 输出时的输入 CV(供 HMI 使用)。 |
Val_MinCVIn5 | REAL | 最小 CV5 输出时的输入 CV(供 HMI 使用)。 |
Val_MaxCVIn5 | REAL | 最大 CV5 输出时的输入 CV(供 HMI 使用)。 |
Val_MinCVIn6 | REAL | 最小 CV6 输出时的输入 CV(供 HMI 使用)。 |
Val_MaxCVIn6 | REAL | 最大 CV6 输出时的输入 CV(供 HMI 使用)。 |
Val_MinCVIn7 | REAL | 最小 CV7 输出时的输入 CV(供 HMI 使用)。 |
Val_MaxCVIn7 | REAL | 最大 CV7 输出时的输入 CV(供 HMI 使用)。 |
Val_MinCVIn8 | REAL | 最小 CV8 输出时的输入 CV(供 HMI 使用)。 |
Val_MaxCVIn8 | REAL | 最大 CV8 输出时的输入 CV(供 HMI 使用)。 |
Sts_Initialized | BOOL | 1 = 指令已初始化。使用 Inp_InitializeReq 重新初始化。 |
Sts_CVInfNaN | BOOL | 1 = Inp_CV 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CVLimited | BOOL | 1 = 输出 CV 在配置的最大值/最小值处钳位。 |
Sts_CV1InitializationInfNaN | BOOL | 1 = Inp_CV1InitializationVal 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CV1Limited | BOOL | 1 = 输出 CV1 在配置的最大值/最小值处钳位。 |
Sts_CV2InitializationInfNaN | BOOL | 1 = Inp_CV2InitializationVal 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CV2Limited | BOOL | 1 = 输出 CV2 在配置的最大值/最小值处钳位。 |
Sts_CV3InitializationInfNaN | BOOL | 1 = Inp_CV3InitializationVal 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CV3Limited | BOOL | 1 = 输出 CV3 在配置的最大值/最小值处钳位。 |
Sts_CV4InitializationInfNaN | BOOL | 1 = Inp_CV4InitializationVal 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CV4Limited | BOOL | 1 = 输出 CV4 在配置的最大值/最小值处钳位。 |
Sts_CV5InitializationInfNaN | BOOL | 1 = Inp_CV5InitializationVal 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CV5Limited | BOOL | 1 = 输出 CV5 在配置的最大值/最小值处钳位。 |
Sts_CV6InitializationInfNaN | BOOL | 1 = Inp_CV6InitializationVal 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CV6Limited | BOOL | 1 = 输出 CV6 在配置的最大值/最小值处钳位。 |
Sts_CV7InitializationInfNaN | BOOL | 1 = Inp_CV7InitializationVal 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CV7Limited | BOOL | 1 = 输出 CV7 在配置的最大值/最小值处钳位。 |
Sts_CV8InitializationInfNaN | BOOL | 1 = Inp_CV8InitializationVal 无穷大或非数字(1.$、1.#NaN)。 |
Sts_CV8Limited | BOOL | 1 = 输出 CV8 在配置的最大值/最小值处钳位。 |
Sts_Err | BOOL | 1 = 配置出错:请参阅明细位 (Sts_Errxxx) 以查找原因。 |
Sts_ErrLim | BOOL | 1 = 配置出错:CV 钳位限制颠倒(最大值 < 最小值)。 |
Sts_ErrEU | BOOL | 1 = 配置出错:以工程单位 (EU) 表示的 CV 缩放最小值 = 最大值。 |
Sts_ErrCV1Lim | BOOL | 1 = 配置出错:CV1 钳位限制颠倒(最大值 < 最小值)。 |
Sts_ErrCV2Lim | BOOL | 1 = 配置出错:CV2 钳位限制颠倒(最大值 < 最小值)。 |
Sts_ErrCV3Lim | BOOL | 1 = 配置出错:CV3 钳位限制颠倒(最大值 < 最小值)。 |
Sts_ErrCV4Lim | BOOL | 1 = 配置出错:CV4 钳位限制颠倒(最大值 < 最小值)。 |
Sts_ErrCV5Lim | BOOL | 1 = 配置出错:CV5 钳位限制颠倒(最大值 < 最小值)。 |
Sts_ErrCV6Lim | BOOL | 1 = 配置出错:CV6 钳位限制颠倒(最大值 < 最小值)。 |
Sts_ErrCV7Lim | BOOL | 1 = 配置出错:CV7 钳位限制颠倒(最大值 < 最小值)。 |
Sts_ErrCV8Lim | BOOL | 1 = 配置出错:CV8 钳位限制颠倒(最大值 < 最小值)。 |
初始化
指令通常在首次运行时进行初始化。通过设置 Inp_InitializeReq = 1 请求重新初始化。为了进行正确的初始化,如果在执行代码的联机编辑时添加指令,请确保默认值 Inp_InitializeReq = 1。
HMI 字符串配置
配置 HMI 面板(FT 视图)和
Logix Designer
配置对话框的字符串。字符串将设置为标签项的扩展属性。仅配置 Logix Designer
中的字符串。- 说明
- 图形符号的标签
- 用于 HMI 面板调用的显示库
- 指令名称
- 区域名称
- URL 链接
- CV 单位
- 输出 CV 标签 CV1
- 输出 CV 标签 CV2
- 输出 CV 标签 CV3
- 输出 CV 标签 CV4
- 输出 CV 标签 CV5
- 输出 CV 标签 CV6
- 输出 CV 标签 CV7
- 输出 CV 标签 CV8
- CV1 EU(工程单位)
- CV2 工程单位 (EU)
- CV3 工程单位 (EU)
- CV4 工程单位 (EU)
- CV5 工程单位 (EU)
- CV6 工程单位 (EU)
- CV7 工程单位 (EU)
- CV8 工程单位 (EU)
- 允许导航对象标签名称输入 CV
- 允许导航对象标签名称 CV1
- 允许导航对象标签名称 CV2
- 允许导航对象标签名称 CV3
- 允许导航对象标签名称 CV4
- 允许导航对象标签名称 CV5
- 允许导航对象标签名称 CV6
- 允许导航对象标签名称 CV7
- 允许导航对象标签名称 CV8
监控 PFO 指令
使用 PlantPAx 过程对象库中的操作员面板进行监控。
影响数学状态标志
编号
严重/轻微故障
没有特定于此指令的故障。请参见“数组索引编制”,了解关于数组索引故障的信息。
执行
梯形图
条件/状态 | 执行的操作 |
预扫描 | 梯级输出条件设置为假。 |
指令首次运行 | 指令正常执行。 |
梯级输入条件为假 | 梯级输出条件设置为假。 |
梯级输入条件为真 | 将梯级输出条件设置为梯级输入条件。 指令执行。 |
后扫描 | 梯级输出条件设置为假。 |
功能块图
条件/状态 | 执行的操作 |
预扫描 | EnableOut 设置为假。 |
指令首次运行 | 指令正常执行。 |
指令首次扫描 | 请参阅“功能块图”表中的“指令首次运行”行。 |
EnableIn 为假 | EnableOut 设置为假。 |
EnableIn 为真 | EnableOut 设置为真。 指令执行。 |
后扫描 | EnableIn 和 EnableOut 位设置为假。 |
结构化文本
在结构化文本中,EnableIn 在普通扫描期间始终为真。指令在处于由逻辑激活的控制路径中时执行。
条件/状态 | 执行的操作 |
预扫描 | 请参阅“功能块图”表中的“预扫描”行。 |
指令首次运行 | 请参阅“功能块图”表中的“指令首次运行”行。 |
EnableIn 为真 | 请参阅“功能块图”表中的“EnableIn 为真”行。 |
后扫描 | 请参阅“功能块图”表中的“后扫描”行。 |
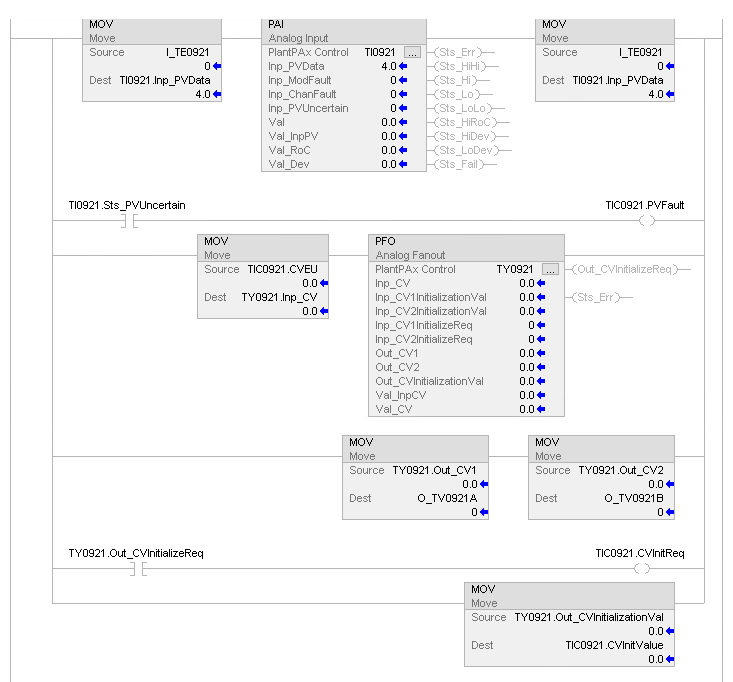
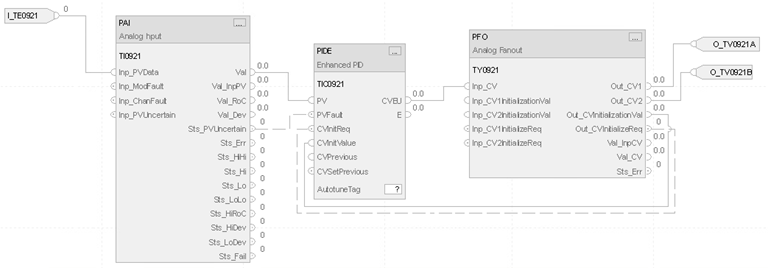
示例
在该示例中,PFO 指令用于实施分程 PID 控制策略以控制处理容器的温度。容器套的热交换器由蒸汽阀加热或乙二醇阀冷却。温度由一个 PID 进行控制。该示例假定每个阀与温度之间的相对过程增益相同。
梯形图
功能块图
结构化文本
TI0921.Inp_PVData:=I_TE0921;
PAI(TI0921);
TIC0921.PV:= TI0921.Val;
TIC0921.PVFault:=TI0921.Sts_PVUncertain;
PIDE(TIC0921);
TY0921.Inp_CV:=TIC0921.CVEU;
TIC0921.CVInitReq:=TY0921.Out_CVInitializeReq;
TIC0921.CVInitValue:=TY0921.Out_CVInitializationVal;
O_TV0921A:=TY0921.Out_CV1;
O_TV0921B:=TY0921.Out_CV2;
PFO(TY0921);
提供反馈