曲柄轴位置监视 (CPM)
本指令适用于 Compact GuardLogix 5370、GuardLogix 5570、Compact GuardLogix 5380、GuardLogix 5580 和 ControlLogix 5590 控制器。
“曲柄轴位置监视”指令会监视制动凸轮 (BCAM)、动态凸轮 (DCAM) 和交接 (TCAM) 凸轮,并使用滑块区域输出将位置表示为顶部区域、下行区域或上行区域,以此确定压力机的滑块位置。此外,为进行监视和诊断,提供了顶部区域、下行区域、和上行区域布尔型输出。
可用语言
梯形图
功能块
此指令不可用于功能块中。
结构化文本
此指令不可用于结构化文本中。
警告:
使用该指令时,“滑块区域”输出连接“离合器-制动器寸动模式”(CBIM)、“离合器-制动器单冲程模式”(CBSSM)、“离合器-制动器连续模式”(CBCM) 和“凸轮轴监视”(CSM) 指令中的“滑块区域”输入。
当滑块进入顶部区域时,压力机开始执行正常停止操作。当压力机停在顶部区域时,表示成功停止。在正常停止期间,由于压力机本身的速度,压力机可能停在下行区域。这称为超限。为尽量避免此问题,可以启用 DCAM 以生成早期顶部区域信号,使压力机能够及早开始停止操作。
警告:
需要时,只应根据压力机的速度启用 DCAM 以执行正常停止操作。不要通过调整 DCAM 来解决制动性能退化的问题。
警告:
只能在设置模式下通过使用“离合器-制动器寸动模式”(CBIM) 指令将压力机方向反转。压力机方向反转后,仅滑块从下行区域移动到顶部区域,随后 CBIM 指令会自动将压力机停到顶部区域。如果压力机进行反向运动,进入上行区域,将发生故障。
操作数
重要提示:
在同一程序中,切勿将同一标签名称用于多个指令。在任何情况下,均不要对任何指令输出标签执行写操作。
警告:
如果在运行模式下更改指令参数,必须接受待定的编辑内容,并将控制器模式从编程模式循环切换到运行模式,以使更改生效。
下表给出了用于配置指令的参数。运行期间无法更改这些参数。
操作数 | 数据类型 | 说明 |
|---|---|---|
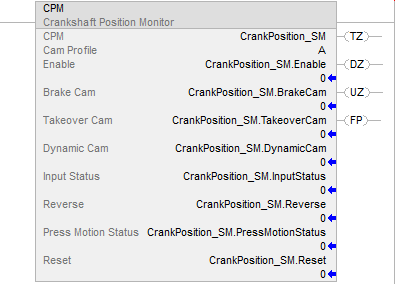
CPM | CB_CRANKSHAFT_POSITION_MONITOR | 该参数是一个支持标签,用于保留每次使用此指令的重要执行信息。  注意: 为避免意外操作,请勿重复使用此支持标签及其成员。请勿在程序中的任何位置对任何标签成员执行写操作。 |
Cam Profile | BOOL | 此参数确定用于生成滑块区域值的凸轮轮廓轨迹。 A (0) - 参见下文的“CPM - 凸轮轮廓轨迹”和“CPM – 正常运行(凸轮轮廓轨迹 A)”。 B (1) - 参见下文的“CPM - 凸轮轮廓轨迹”和“CPM - 正常运行(凸轮轮廓轨迹 B)”。 |
下表介绍指令输入。输入可能是来自输入设备的现场设备信号,也可能源自用户逻辑。
操作数 | 数据类型 | 说明 | |
|---|---|---|---|
Enable | BOOL | 此信号用于启用“曲柄轴位置监视”(CPM) 指令。 ON (1):指令输出启用。 关闭 (OFF) (0):指令输出禁用。 | |
Brake Cam (BCAM) | BOOL | 该输入来自凸轮监控设备(硬凸轮)或应用逻辑(软凸轮)。 | |
Cam Profile A | This input specifies the overrun point and the Top zone when dynamic stopping is disabled. OFF (0) -> ON (1): While the press is running and dynamic stopping is disabled, this transition signals the end of the Up zone and the start of the Top zone. ON (1) -> OFF (0): While the press is stopping, this transition causes the Camshaft Monitor instruction to generate a brake fault. | ||
Cam Profile B | This input specifies the overrun point and the zone where immediate braking of the press is allowed. OFF (0) - No effect. OFF (0) -> ON (1): When detected while the press is stopping, this transition causes the Camshaft Monitor (CSM) instruction to generate a brake fault. While the press is running, this transition signals the end of the Top zone and start of the Down zone. ON (1) -> OFF (0): While the press is running, this transition must occur after the OFF (0) to ON (1) transition of the Takeover cam (TCAM). | ||
Takeover Cam (TCAM) | BOOL | 该输入来自凸轮监控设备(硬凸轮)或应用逻辑(软凸轮)。 | |
Cam Profile A | This input is used to indicate the start of the Up zone. OFF (0) -> ON (1): This transition signals the start of the end of the Down zone and the start of the Up zone. ON (1) -> OFF (0: When dynamic stopping is enabled, this transition has no effect unless the dynamic stop signal has yet to occur. When this happens, this transition signals the end of the Up zone and start of the Top zone. | ||
Cam Profile B | This input is used to indicate the start of the Up zone. OFF (0): The press is considered to be in the Down zone when the Brake cam (BCAM) is ON (1). OFF (0) -> ON (1): This transition signals the start of the Up zone and the end of the Down zone and must occur before the ON (1) to OFF (0) transition of the BCAM. ON (1) -> OFF (0): When dynamic stopping is not enabled, this transition signals the end of the upstroke and the start of the Top zone. When dynamic stopping is enabled, this transition has no effect unless the dynamic stop signal has yet to occur. In this case, the dynamic stopping enable behavior is performed. | ||
Dynamic Cam (DCAM) | BOOL | 该输入用于为快速运行的压力机生成早期顶部区域信号。该输入来自凸轮监控设备(硬凸轮)或应用逻辑(软凸轮)。 此参数与安全无关。 | |
Cam Profile A | When dynamic stopping is not required, this input should be sourced by the inverse of the Brake Cam (BCAM). OFF (0) -> ON (1): Dynamic stopping is enabled when this transition occurs at or after the ON (1) to OFF (0) transition of the BCAM. ON (1) -> OFF (0): This transition signals the end of upstroke and the start of the Top zone when it occurs before the OFF (0) to ON (1) transition of the Takeover cam (TCAM). | ||
Cam Profile B | When dynamic stopping is not required, this input should be sourced by the Takeover Cam (TCAM). OFF (0) -> ON (1): Dynamic stopping is enabled when this transition occurs at or after the OFF (0) to ON (1) transition of the TCAM. ON (1) -> OFF (0): This transition signals the end of Up zone and the start of the Top zone when it occurs at or before the ON (1) to OFF (0) transition of the TCAM. | ||
Input Status | BOOL | 除了 I/O 模块状态外,该输入还表示凸轮监视功能的组合状态。 ON:输入有效。滑块区域状态位置 1。 OFF:输入无效。所有输出切断或置于 OFF (0) 状态。滑块区域状态位设为 0。 | |
Reverse | BOOL | 只能在设置模式下通过使用“离合器-制动器寸动模式”(CBIM) 指令将压力机方向反转。压力机方向反转后,仅允许滑块从下行区域移动到顶部区域,随后“离合器-制动器寸动模式”(CBIM) 指令会自动停止压力机运动。如果反向运动继续进入上行区域,将发生故障。 关闭 (OFF) (0):禁用反向操作。 ON (1):滑块处于下行区域时,该指令将使压力机向顶部区域移动。如果在滑块处于上行区域时此输入为 ON (1),将发生故障。 | |
Press Motion Status | BOOL | 该输入表示压力机的运动状态,来自“主阀控制”(MVC) 指令的输出 1 或其他阀门控制应用逻辑。 关闭 (OFF) (0):压力机已经停止或者已经发出停止请求。 ON (1):压力机正在运行或已经发出启动请求。
重要提示:
如果请求压力机在顶部区域停止,则当滑块从上行区域向顶部区域过渡时,将启用超限监视。当滑块继续移动到下行区域时,将发生超限故障。
| |
Reset (1) | BOOL | 如果不存在故障条件,此输入将清除指令故障。 OFF (0) -> ON (1):“存在故障”和“故障代码”输出复位。 | |
(1)
ISO 13849-1 规定,指令复位功能必须在出现下降沿信号时触发。为遵从 ISO 13849-1 要求,在该指令前增加此逻辑。将此示例中的“Reset_Signal”标签重命名为复位信号的标签名称。然后使用 OSF 指令的“输出位”标签作为指令的复位信号源。
下表介绍指令输出。输出可能是现场设备信号,也可能源自用户逻辑。
操作数 | 数据类型 | 说明 | ||||
|---|---|---|---|---|---|---|
Slide Zone | DINT | 该输出表示滑块的位置和位置信息状态。该输出可接到“离合器-制动器寸动模式”(CBIM)、“离合器-制动器单冲程模式”(CBSSM)、“离合器-制动器连续模式”(CBCM) 和“凸轮轴监视”(CSM) 指令中的“滑块区域”输入。 这是一个位映射值,其中: 位 0:状态 OFF (0) - 滑块区域信息无效。阻止在初始启动时接通输出 1,或者立即切断输出 1。 ON (1) - 滑块区域信息有效。 位 1 和 2:滑块区域 下表列出了代表有效滑块区域的位 0 到 2 的组合。 | ||||
Bit 2 | Bit 1 | 位 0 | Slide Zone | Decimal Value | ||
0 | 0 | 1 | Down | 1 | ||
0 | 1 | 1 | Up | 3 | ||
1 | 0 | 1 | Top | 5 | ||
Bits 3 through 31: Unused; Set to 0. | ||||||
Top Zone (TZ) | BOOL | 此信息指示滑块处于顶部区域。 | ||||
Down Zone (DZ) | BOOL | 此信息指示滑块处于下行区域。 | ||||
Up Zone (UZ) | BOOL | 此信息指示滑块处于上行区域。 | ||||
Diagnostic Code | DINT | 此输出指示指令的诊断状态。有关诊断代码列表,请参见下文的“CPM – 诊断代码”部分。 此参数与安全无关。 | ||||
Fault Code | DINT | 此输出指示所发生故障的类型。有关故障代码列表,请参见下文的“CPM – 故障代码”部分。 此参数与安全无关。 | ||||
Fault Present (FP) | BOOL | ON (1):指令中存在故障。 关闭 (OFF) (0):指令正常运行。 | ||||
重要提示:
在任何情况下,均不要对任何指令输出标签执行写操作。
凸轮轮廓轨迹
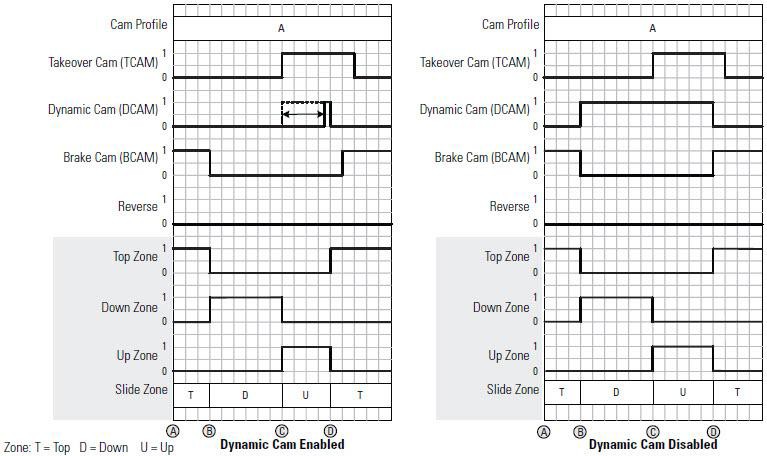
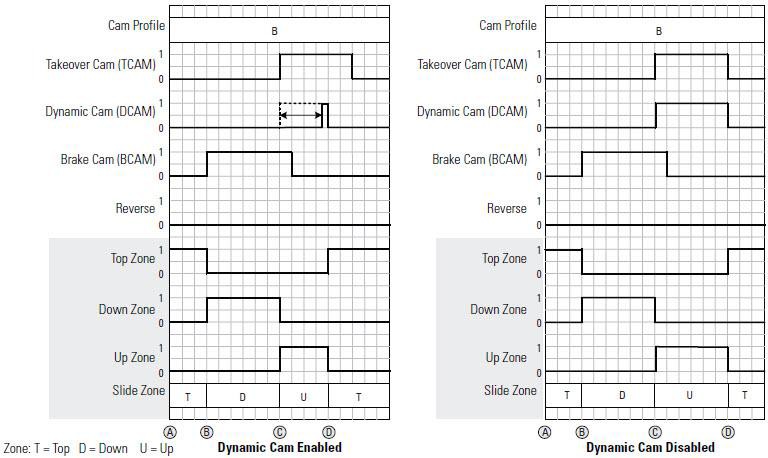
该指令支持使用两种凸轮轮廓轨迹 A 或 B,可通过“凸轮轮廓轨迹”可配置参数进行选择。凸轮轮廓轨迹 A 与 B 的主要区别是制动凸轮 (BCAM) 的配置不同。在轮廓轨迹 A 中,BCAM 被配置为代表顶部区域,而在轮廓轨迹 B 中,BCAM 则代表下行区域。两个轮廓轨迹中,交接凸轮 (TCAM) 均被配置为代表上行区域。
以下轮廓轨迹图说明了在动态凸轮 (DCAM) 启用的情况下凸轮之间的关系。
在启用 DCAM 的情况下,DCAM 在两种轮廓轨迹中的配置方式相同,如果在上行区域期间 DCAM 由 ON (1) 跳变为 OFF (0),将生成早期顶部区域信号。此跳变可配置为在上行区域期间的任何时间发生,具体取决于压力机的速度。但当 DCAM 被禁用时,必须按如下方式配置 DCAM:
- 轮廓轨迹 A - 必须将 BCAM 输入源取反后接到 DCAM。
- 轮廓轨迹 B - 必须将 TCAM 输入源接到 DCAM。

警告:
这些凸轮轮廓轨迹中未显示凸轮角度。凸轮角度应由有相应资质的人员进行选择。
警告:
当凸轮轮廓轨迹配置为 A 且动态停止功能禁用时,必须将制动凸轮 BCAM 输入源取反后接到动态凸轮 (DCAM) 输入。
警告:
当凸轮轮廓轨迹配置为 B 且动态停止功能禁用时,动态凸轮 (DCAM) 输入必须来自交接凸轮 (TCAM) 输入源。
正常运行(凸轮轮廓轨迹 A)
以下示例描述了在凸轮轮廓轨迹 A 模式下压力机沿正向移动的正常运行过程。在 (A) 点,压力机启动,滑块处于顶部区域,交接凸轮输入 (TCAM) 为 OFF (0),制动凸轮输入 (BCAM) 为 ON (1),滑块区域设置为顶部区域。随着压力机运动,在 (B) 点,BCAM 输入由 ON (1) 跳变为 OFF (0),滑块区域由顶部区域变为下行区域。随着压力机继续运动,在 (C) 点,TCAM 输入由 OFF (0) 跳变为 ON (1),滑块区域由下行区域变为上行区域。压力机进一步运动时,会导致滑块区域输出由上行区域变为顶部区域,具体发生变化的点取决于动态凸轮输入 (DCAM) 的配置。
在启用 DCAM 的情况下,在 (D) 点,当 DCAM 输入由 ON (1) 跳变为 OFF (0),并且 TCAM 输入为 ON (1) 时,滑块区域由上行区域变为顶部区域。在禁用 DCAM 的情况下,在 (D) 点,当 BCAM 输入由 OFF (0) 跳变为 ON (1) 时,滑块区域由上行区域变为顶部区域。
正常运行(凸轮轮廓轨迹 B)
以下示例描述了在凸轮轮廓轨迹 B 模式下压力机沿正向移动的正常运行过程。在 (A) 点,压力机启动,滑块处于顶部区域,交接凸轮输入 (TCAM) 和制动凸轮输入 (BCAM) 均为 OFF (0),滑块区域设置为顶部区域。随着压力机运动,在 (B) 点,BCAM 输入由打开 (ON) (1) 跳变为 关闭 (OFF) (0),滑块区域由顶部区域变为下行区域。随着压力机继续运动,在 (C) 点,TCAM 输入由 OFF (0) 跳变为 ON (1),滑块区域由下行区域变为上行区域。压力机进一步运动时,会导致滑块区域输出由上行区域变为顶部区域,具体发生变化的点取决于动态凸轮输入 (DCAM) 的配置。
在启用 DCAM 的情况下,在 (D) 点,当 DCAM 输入由 ON (1) 跳变为 OFF (0),并且 TCAM 输入为 ON (1)、BCAM 输入为 OFF (0) 时,滑块区域输出由上行区域变为顶部区域。在禁用 DCAM 的情况下,在 (D) 点,当 TCAM 输入由 ON (1) 跳变为 OFF (0) 时,滑块区域输出由上行区域变为顶部区域。
假梯级状态行为
在假梯级执行该指令时,所有指令输出均切断。
故障代码与处理措施
故障代码采用十六进制格式,后面跟有十进制格式。
故障代码 | 说明 | 纠正措施 | |
|---|---|---|---|
00 | 无故障。 | 无。 | |
16#20 32 | 指令执行期间,“输入状态”输入由 ON (1) 跳变为 OFF (0)。 |
| |
16#1000 4096 | 当压力机正向运动时,检测到滑块从顶部区域运动到上行区域。 |
| |
16#1001 4097 | 当压力机正向运动时,检测到滑块从下行区域运动到顶部区域。 | ||
16#1002 4098 | 当压力机正向运动时,检测到滑块从上行区域运动到下行区域。 | ||
16#1003 4099 | 当压力机正向运动时,检测到滑块从上行区域运动到下行区域。 | ||
16#1004 4100 | 当压力机反向运动时,检测到滑块从顶部区域运动到下行区域。压力机反向运动时仅允许向顶部区域运动。 | ||
16#1005 4101 | 当压力机反向运动时,检测到滑块从下行区域运动到上行区域。启用反向运动时,不允许压力机正向运动。 | ||
16#1006 4102 | 动态凸轮 (DCAM) 保持在 OFF (0) 位置。 |
| |
16#1007 4103 | 动态凸轮 (Dynamic cam, DCAM) 保持在打开 (ON) (1) 位置。 | ||
16#1008 4104 | 凸轮轮廓轨迹 A | 当滑块处于下行区域时,DCAM 跳变为 OFF (0)。 | |
凸轮轮廓轨迹 B | 不适用 | ||
16#1009 4105 | 凸轮轮廓轨迹 A | 交接凸轮 (TCAM) 保持在 ON (0) 位置。 |
|
凸轮轮廓轨迹 B | 不适用 | ||
16#100A 4106 | 凸轮轮廓轨迹 A | 不适用 |
|
凸轮轮廓轨迹 B | 制动凸轮 (BCAM) 保持在 ON (0) 位置。 | ||
16#1020 4128 | 当滑块处于上行区域时,请求压力机反向运动。 |
| |
16#1040 4160 | 发生滑块超限故障。 |
| |
诊断代码与纠正措施
诊断代码采用十六进制格式,后面跟有十进制格式
故障代码 | 说明 | 纠正措施 |
|---|---|---|
00 | 无故障。 | 无。 |
16#20 32 | 当指令启动时,“输入状态”输入为 OFF (0)。 | 检查 I/O 模块连接或用于决定输入状态的“凸轮轴监视”(CSM) 指令。 如果输入不是来自安全 I/O 模块,请将“输入状态”输入设置为 ON (1)。 |
影响数学状态标志
否
严重/轻微故障
没有特定于此指令的故障。请参见“数组索引编制”,了解关于数组索引故障的信息。
执行
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 与梯级输入条件为假时相同。 |
梯级输入条件为假 | .TZ、DZ、UZ 和 FP 设置为假。 诊断代码、故障代码和滑块代码设为 0。 |
梯级输入条件为真 | 此指令按正常运行部分所述执行。 |
后扫描 | 与梯级输入条件为假时相同。 |
提供反馈