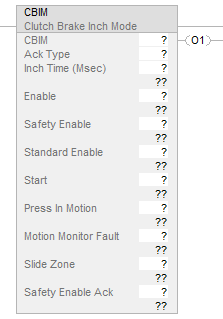
离合器-制动器寸动模式 (CBIM)
本指令适用于 Compact GuardLogix 5370、GuardLogix 5570、Compact GuardLogix 5380、GuardLogix 5580 和 ControlLogix 5590 控制器。
“离合器-制动器寸动模式”(CBIM) 指令用于需要进行微小滑块调节(例如,在压力机设置期间)的压力机应用中。在寸动模式运行期间,飞轮由主电机或其他驱动机构以非常低的速度驱动。
可用语言
梯形图
功能块
此指令不可用于功能块中。
结构化文本
此指令不可用于结构化文本中。
警告:
如果异物进入危险区的情况有可能无法被检测到,则不要使用自动应答。如果为该指令配置自动应答,则必须将该指令与其他指令配合使用,至少其中一个指令必须满足手动复位要求。复位控制装置必须在视野范围内,并且远离危险区。有关详细信息,请参见 EN692-2005 的第 5.4.1.3 节。
警告:
使用该指令时,滑块区域输入仅来自“曲柄轴位置监视”(CPM) 指令的滑块区域输出或应用逻辑,该应用逻辑须满足此指令输入表所列的滑块区域要求。
使用该指令时,“使能”输入仅以“八位模式选择器”(EPMS) 指令的 Ox 输出
1
作为信号源,所用输出不能同时接到“离合器-制动器寸动模式”(CBIM)、“离合器-制动单冲程模式”(CBSSM) 或“离合器-制动器连续模式”(CBCM) 指令的使能输入。1
其中 x = 1 到 8
警告:
根据 EN692-2005 第 5.5.2 节的规定,需要提供必要装置,使得滑块在工具设置、维护和润滑期间能够在安全防护装置的正常保护下运动(参见第 5.3.2 节)。
如果这种机制无法实现,应至少提供以下装置之一:
a.手动旋转曲轴,电源隔离
b.慢速(等于或小于 10 mm/s)点动控制设备。
c.符合 5.5.9 规定的双手控制装置,在安装该装置时,应考虑在某些情况下(例如,曲轴转一转,压力机循环应至少停止三次)不应将其用于生产。
d.使用寸动装置。
配置寸动时间参数时,需满足 EN692-2005 5.5.2 c 规定的一次压力机循环停止 3 次的要求。
操作数
重要提示:
在同一程序中,切勿将同一标签名称用于多个指令。在任何情况下,均不要对任何指令输出标签执行写操作。
警告:
如果在运行模式下更改指令参数,必须接受待定的编辑内容,并将控制器模式从编程模式循环切换到运行模式,以使更改生效。
下表给出了用于配置指令的参数。运行期间无法更改这些参数。
参数 | 数据类型 | 格式 | 说明 | |
|---|---|---|---|---|
CBIM | CB_INCH_MODE | 标签 | 该参数是一个支持标签,用于保留每次使用此指令的重要执行信息。  注意: 为避免意外操作,请勿重复使用此支持标签及其成员。请勿在程序中的任何位置对任何标签成员执行写操作。 | |
应答类型 (Ack Type) | BOOL | 名称 | 此参数指定在安全使能由 OFF (0) 跳变至 ON (1) 时如何应答。必须在输出 1 能够接通之前进行应答。 | |
自动 | The acknowledgment is made automatically when the Safety Enable input transitions from OFF (0) to ON (1). | |||
手动 | The acknowledgment is made when Safety Enable Ack transitions from OFF (0) to ON (1) after the Safety Enable input transitions from OFF (0) to ON (1). | |||
寸动时间 (Inch Time) | DINT | 立即数 | 该参数代表在“启动”输入为 ON (1) 时允许输出 1 保持接通的时间。如果“启动”输入在计时器过期前由 ON (1) 跳变为 OFF (0),输出 1 切断。有效范围为 0 到 5000 ms。值为 0 时禁用计时器。 | |
下表介绍指令输入。
参数 | 数据类型 | 格式 | 说明 | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
启用 | BOOL | 标签 | 此输入信号用于激活该指令。例如,通过“八位模式选择器”(EPMS) 指令的 Ox 输出(其中 x = 1 到 8)激活。 ON (1):该指令被选择并且可运行。 关闭 (OFF) (0):该指令未在运行。所有指令输出均切断。 | ||||||||||||||||||||
安全使能 (Safety Enable) | BOOL | 标签 | 该输入代表与安全相关的选通装置(例如急停设备、光幕或安全门)的状态。 ON (1):选通装置正在主动保护危险区。允许输出 1 接通。 关闭 (OFF) (0):选通装置处于不允许输出 1 接通的状态。 | ||||||||||||||||||||
标准使能 (Standard Enable) | BOOL | 标签 | 指示非安全相关选通装置的状态。 ON (1):允许输出 1 接通。 关闭 (OFF) (0):阻止输出 1 接通。 此参数与安全无关。 | ||||||||||||||||||||
启动 | BOOL | 标签 | 用于启动压力机运动的输入。 ON (1):如果满足所有输入条件,则接通输出 1。 关闭 (OFF) (0):输出 1 切断。 | ||||||||||||||||||||
压力机运动中 (Press In Motion) | BOOL | 标签 | 该输入通常来自“凸轮轴监视”(CSM) 指令的输出 1 或用户应用逻辑。构建此信号时,需要包括来自压力机安全阀的反馈信号。 ON (1):指示压力机正在运动。 关闭 (OFF) (0):指示压力机停止运动。 | ||||||||||||||||||||
滑块区域 | DINT | 标签 | 该输入表示滑块的位置和位置信息状态。它来自提供以下位映射信息的“曲柄轴位置监视”(CPM) 指令“滑块区域”输出或用户应用逻辑。 位 0:状态 OFF (0) - 滑块区域信息无效。阻止在初始启动时接通输出 1,或者立即停止压力机运动。 ON (1) - 滑块区域信息有效。 位 1 和 2:滑块区域 下表列出了代表有效滑块区域的位 0 到 2 的组合。
位 3 到 31:未使用;设为 0。 | ||||||||||||||||||||
运动监视故障 (Motion Monitor Fault) | BOOL | 标签 | 检测到压力机运动问题时,立即停止压力机。该输入由“凸轮轴监视”(CSM) 指令的“存在故障”输出经取反后接入,或者来自执行运动诊断的应用逻辑。 ON (1):指示压力机运动有效。允许输出 1 接通。 关闭 (OFF) (0):指示存在压力机运动问题。阻止输出 1 接通或立即切断输出 1。 | ||||||||||||||||||||
安全使能应答 (Safety Enable Ack) | BOOL | 标签 | 当所配置的应答类型为手动时,需要此输入。 OFF (0) - 输入关闭 OFF (0)->ON (1):此信号跳变确认“安全使能”输入已由 OFF (0) 跳变为 ON (1)。 ON (1) - 输入打开 |
下表介绍指令输出。
参数 | 数据类型 | 说明 |
输出 1 (Output 1, O1) | BOOL | 指令输出
小贴士:
此输出可接到“主阀控制”指令的“启动”输入。
ON (1):输出已接通。 关闭 (OFF) (0):输出已断电。 有关详细信息,请参见下文的“CBIM - 接通输出 1”和“CBIM - 切断输出 1”部分。 |
Diagnostic Code | DINT | 此输出指示指令的诊断状态。有关诊断代码列表,请参见下文的“CBIM – 诊断代码”部分。 此参数与安全无关。 |
重要提示:
在任何情况下,均不要对任何指令输出标签执行写操作。
操作
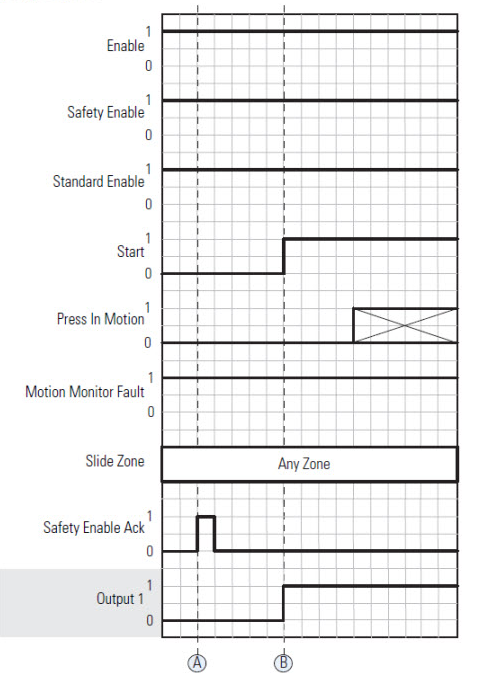
接通输出 1
仅当“启动”输入由 OFF (0) 跳变为 ON (1),并且满足以下所有条件时,输出 1 才接通:
- “使能”输入为 ON (1)。
- “安全使能”输入已应答。
- “标准使能”输入为 ON (1)。
- “运动监视故障”输入为 ON (1)。
- “压力机运动中”输入为 OFF (0)。
- “安全使能应答”输入为 OFF (0)。重要提示: 如果应答类型为手动,则当“使能”输入由 OFF (0) 跳变为 ON (1) 时,需要应答“安全使能”输入,然后“启动”输入才会跳变为 ON (0)。
警告:
将应答类型配置为自动时,如果当“启动”输入由 OFF (0) 跳变为 ON (1) 的同时,“安全使能”、“标准使能”、“压力机运动中”和“运动监视故障”输入返回激活或有效状态,则输出 1 接通。
警告:
决定滑块位置的凸轮开关由 CPM 指令进行监视。该指令以 CPM 指令的“滑块区域”输出来表示决定滑块位置的凸轮开关。
在下图中,“安全使能”输入在 (A) 点得到应答。在 (B) 点,“启动”输入由 OFF (0) 跳变为 ON (1),并且满足所有输入条件,因此输出 1 接通。若配置的确认类型为手动,仅需要在“安全使能”输入为 ON (1) 时进行一次安全使能应答。
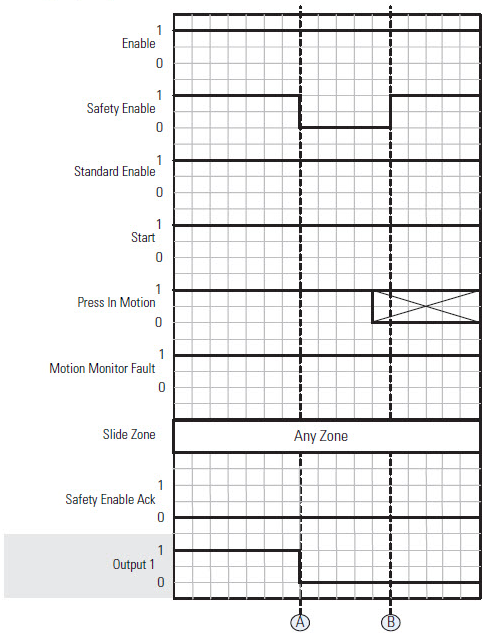
切断输出 1
输出 1 接通后,当发生以下一种或多种情况时会切断:
- “使能”输入由 ON (1) 跳变为 OFF (0)。
- “启动”输入由 ON (1) 跳变为 OFF (0)。
- “安全使能”输入由 ON (1) 跳变为 OFF (0)。
- “标准使能”输入由 ON (1) 跳变为 OFF (0)。
- 滑块移动到顶部区域。
- 寸动时间计时器到期。
- 运动监视故障输入由 ON (1) 跳变为 OFF (0)。
“压力机运动中”输入不是在切断输出 1 前的检查条件。而仅是接通输出 1 前的检查条件。
在下图中,在 (A) 点,“安全使能”输入由 ON (1) 跳变为 OFF (0),输出 1 切断。在 (B) 点,当“安全使能”输入由 OFF (0) 跳变为 ON (1) 时,需要应答“安全使能”输入,此后输出 1 才可以重新接通。
假梯级状态行为
在假梯级执行该指令时,所有指令输出均切断。
诊断代码与纠正措施
尝试通过接通输出 1 启动压力机运动时,检测诊断代码 16#2001...16#2009。通过切断输出 1 停止压力机运动时,使用诊断代码 16#2021…16#202A 来诊断原因。
诊断代码采用十六进制格式,后面跟有十进制格式。
Diagnostic Code | 说明 | 纠正措施 |
|---|---|---|
00 | 无故障。 | 无。 |
16#2000 8192 | 未被此指令使用。 | |
16#2001 8193 | 由于“压力机运动中”输入为 ON (1),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 |
当“压力机运动中”输入跳变为 OFF (0) 时,此诊断代码被清除。 |
16#2002 8194 | 如果“启动”输入在应答“安全使能”输入前跳变为 ON (1),输出 1 无法接通。 |
|
16#2003 8195 | 由于“标准使能”输入为 OFF (0),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | 检查用于提供“标准使能”输入的设备是否正常工作。当“标准使能”输入为 ON (1) 时,此诊断代码被清除。 |
16#2008 8196 | 由于“运动监视故障”输入为 OFF (0),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | 检查“凸轮轴监视”(CSM) 指令或用于监视压力机运动的应用逻辑。 当运动监视功能正确监视运动并且“运动监视故障”输入为 ON (1) 时,此诊断代码被清除。 |
16#2009 8197 | 手动应答类型: 由于安全使能应答输入为 ON (1),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | 将安全使能应答输入跳变为 OFF (0)。 当安全使能应答输入跳变为 OFF (0) 时,此诊断代码被清除。 |
自动应答类型: 不适用 | ||
16#2021 8225 | 由于“运动监视故障”输入跳变为 OFF (0),输出 1 切断。 | 检查“凸轮轴监视”(CSM) 指令或用于监视压力机运动的应用逻辑。 在下次尝试启动压力机运动时,此诊断代码被清除。 |
16#2022 8226 | 未被此指令使用。 | |
16#2023 8227 | 由于“安全使能”输入跳变为 OFF (0),输出 1 切断。 | 检查用于提供“安全使能”输入的 AOPD 和 ESPE 目前是否为其相应区域提供保护。 在下次尝试启动压力机运动时,此诊断代码被清除。 |
16#2024 8228 | 由于“标准使能”输入跳变为 OFF (0),输出 1 切断。 | 检查用于提供“标准使能”输入的设备和应用逻辑是否正常工作。 在下次尝试启动压力机运动时,此诊断代码被清除。 |
16#2025 8229 | 由于“启动”输入跳变为 OFF (0),输出 1 切断。 | 无论滑块处于哪个区域,“启动”输入跳变为 OFF (0) 时都会导致输出 1 切断。 在下次尝试启动压力机运动时,此诊断代码被清除。 |
16#2026 8230 | 由于寸动模式计时器超时,输出 1 切断。 | 寸动模式计时器超时,都会导致输出 1 切断。验证“寸动时间”参数值适用于具体的应用。 在下次尝试启动压力机运动时,此诊断代码被清除。 |
16#2027 8231 | 未被此指令使用。 | |
16#2028 8232 | ||
16#2029 8233 | ||
16#202A 8234 | 由于滑块进入顶部区域,输出 1 切断。 | 当滑块进入顶部区域时,输出 1 始终处于切断状态。 在下次尝试启动压力机运动时,此诊断代码被清除。 |
影响数学状态标志
否
严重/轻微故障
没有特定于此指令的故障。请参见“数组索引编制”,了解关于数组索引故障的信息。
执行
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 与梯级输入条件为假时相同 |
梯级输入条件为假 | .O1 设置为假。 “诊断代码”输出设为 0。 |
梯级输入条件为真 | 此指令按运行部分所述执行。 |
后扫描 | 与梯级输入条件为假时相同 |
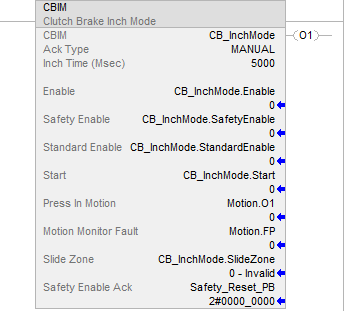
示例
提供反馈