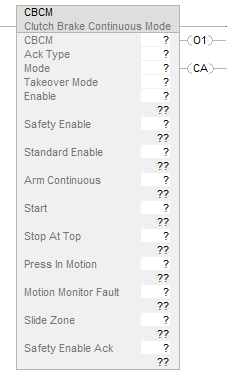
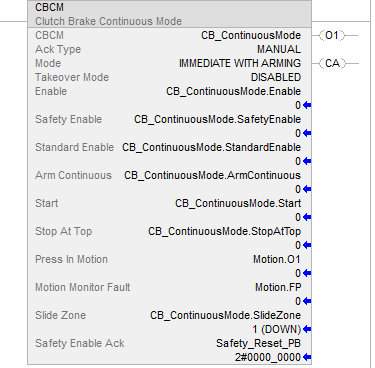
离合器-制动器连续模式 (CBCM)
本指令适用于 Compact GuardLogix 5370、GuardLogix 5570、Compact GuardLogix 5380、GuardLogix 5580 和 ControlLogix 5590 控制器。
“离合器-制动器连续模式”(CBCM) 指令用在需要执行连续操作的压力机应用中。
可用语言
梯形图
功能块
此指令不可用于功能块中。
结构化文本
此指令不可用于结构化文本中。
警告:
如果异物进入危险区的情况有可能无法被检测到,则不要使用自动应答。如果为该指令配置自动应答,则必须将该指令与其他指令配合使用,至少其中一个指令必须满足手动复位要求。
复位控制装置必须在视野范围内,并且远离危险区。
有关详细信息,请参见 EN692-2005 的第 5.4.1.3 节。
警告:
使用该指令时,滑块区域输入仅来自“曲柄轴位置监视”(CPM) 指令的滑块区域输出或应用逻辑,该应用逻辑须满足下文“离合器-制动器连续模式”指令输入表所列的滑块区域要求。
使用该指令时,“使能”输入仅以“八位模式选择器”(EPMS) 指令的 Ox 输出
1
作为信号源,所用输出不能同时接到“离合器-制动器寸动模式”(CBIM)、“离合器-制动单冲程模式”(CBSSM) 或“离合器-制动器连续模式”(CBCM) 指令的使能输入。1
其中 x = 1 到 8模式参数用于指定不同的连续操作模式。“装备后立即”、“装备后半个冲程”和“装备后一个半冲程”这三种模式均需要一个装备序列。要启动装备序列,在“持续运行前装备”输入由 OFF (0) 跳变为 ON (1) 后,“启动”输入需要在五秒钟内由 OFF (0) 跳变为 ON (1)。当满足装备序列要求,并且“启动”输入根据所配置模式的要求保持 ON (1) 时,压力机开始连续工作。
配置立即模式时,不需要装备序列。在立即模式下,当“启动”输入由 OFF (0) 跳变为 ON (1) 时,压力机开始连续工作。
操作数
重要提示:
在同一程序中,切勿将同一标签名称用于多个指令。在任何情况下,均不要对任何指令输出标签执行写操作。
警告:
如果在运行模式下更改指令参数,必须接受待定的编辑内容,并将控制器模式从编程模式循环切换到运行模式,以使更改生效。
下表给出了用于配置指令的参数。运行期间无法更改这些参数。
操作数 | 数据 类型 | 格式 | 说明 | |
|---|---|---|---|---|
CBCM | CB_CONTINUOUS_MODE | 标签 | 该参数是一个支持标签,用于保留每次使用此指令的重要执行信息。  注意: 为避免意外操作,请勿重复使用此支持标签及其成员。请勿在程序中的任何位置对任何标签成员执行写操作。 | |
Ack Type | BOOL | 名称 | 定义指令的应答方式。 | |
Automatic (1) | 当“安全使能”输入由 OFF (0) 跳变为 ON (1) 时,自动进行应答。 | |||
Manual (0) | 当“安全使能应答”输入由 OFF (0) 跳变为 ON (1) 并且“安全使能”输入为 ON (1) 时,进行应答。 | |||
Mode | DINT | 名称 | 该参数用于配置不同的连续工作模式。 | |
Immediate (0) | 当“启动”输入由 OFF (0) 跳变为 ON (1) 时,压力机开始连续工作。 | |||
Immediate with Arming (3) | 装备序列完成后,立即进入连续模式。 | |||
Half Stroke with Arming (1) | 装备序列完成后,“启动”输入信号必须保持为 ON (1),直至到达第一个上冲程区域。 | |||
Stroke and a Half with Arming (2) | 装备序列完成后,“启动”输入信号必须保持为 ON (1),直至滑块完成一个完整循环并到达第二个上冲程区域。 | |||
Takeover Mode | BOOL | 名称 | 当滑块处于上行区域时,如果“安全使能”输入由 ON (1) 跳变到 OFF (0),此参数将决定压力机何时停止。 | |
Enabled (1) | 滑块进入顶部区域时,压力机停止。 | |||
Disabled (0) | 压力机立即停止。 | |||
下表介绍指令输入。
操作数 | 数据类型 | 格式 | 说明 | ||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
Enable | BOOL | 标签 | 该输入信号用于激活该指令;例如,通过“八位模式选择器”(EPMS) 指令的 Ox 输出(其中 x = 1 到 8)激活。 ON (1):该指令被选择并且可运行。 关闭 (OFF) (0):该指令未在运行。所有指令输出均切断。 | ||||||||||||||||||||
Safety Enable | BOOL | 标签 | 该输入代表与安全相关的选通装置(例如急停设备、光幕或安全门)的状态。 ON (1):选通装置正在主动保护危险区。允许 O1(输出 1)接通。 关闭 (OFF) (0):选通装置处于不允许输出 1 接通的状态。 | ||||||||||||||||||||
Standard Enable | BOOL | 标签 | 指示非安全相关选通装置的状态。 ON (1):允许输出 1 接通。 关闭 (OFF) (0):阻止输出 1 接通。 此参数与安全无关。 | ||||||||||||||||||||
Arm Continuous | BOOL | 标签 | 仅针对“装备后立即”、“装备后半个冲程”和“装备后一个半冲程”模式启用装备序列。 ON (1):启用装备序列。“启动”输入由 OFF (0) 跳变为 ON (1) 达 5 秒时,装备序列结束。 | ||||||||||||||||||||
Start | BOOL | 标签 | 用于启动压力机运动的输入。 ON (1):如果满足所有输入条件,则接通输出 1。 关闭 (OFF) (0):输出 1 根据所配置的连续模式保持接通。如果不满足连续模式的要求,输出 1 切断。有关详细信息,请参见下文“离合器-制动器单冲程模式”指令“配置参数”表中的“模式”参数。 | ||||||||||||||||||||
Stop At Top | BOOL | 标签 | 该输入表示请求在到达顶部区域时停止压力机运动。 关闭 (OFF) (0):阻止输出 1 接通。下次滑块进入顶部区域时,断开输出 1。 | ||||||||||||||||||||
Press In Motion | BOOL | 标签 | 该输入通常来自“凸轮轴监视”(CSM) 指令的输出 1 或用户应用逻辑。构建此信号时,需要包括来自压力机安全阀的反馈信号。 ON (1):指示压力机正在运动。 关闭 (OFF) (0):指示压力机停止运动。 | ||||||||||||||||||||
Slide Zone | DINT | 标签 | 该输入表示滑块的位置和位置信息状态。它来自提供以下位映射信息的“曲柄轴位置监视”(CPM) 指令“滑块区域”输出或用户应用逻辑。 位 0:状态 OFF (0) - 滑块区域信息无效。阻止在初始启动时接通输出 1,或者立即停止压力机运动。 ON (1) - 滑块区域信息有效。 位 1 和 2:滑块区域 下表列出了代表有效滑块区域的位 0 到 2 的组合。
位 3 到 31:未使用;设为 0。 | ||||||||||||||||||||
Motion Monitor Fault | BOOL | 标签 | 检测到压力机运动问题时,立即停止压力机。该输入由“凸轮轴监视”(CSM) 指令的“存在故障”输出经取反后接入,或者来自执行运动诊断的应用逻辑。 ON (1):指示压力机运动有效。允许输出 1 接通。 关闭 (OFF) (0):指示存在压力机运动问题。阻止输出 1 接通或立即切断输出 1。 | ||||||||||||||||||||
Safety Enable Ack | BOOL | 标签 | 当所配置的应答类型为手动时,需要此输入。 OFF (0)->ON (1):确认“安全使能”输入已由 OFF (0) 跳变为 ON (1) 。 |
下表介绍指令输出。
操作数 | 数据类型 | 说明 |
|---|---|---|
Output 1 (O1) | BOOL | 此输出可接到“主阀控制”(MVC) 指令的“启动”输入。 ON (1):输出已接通。 关闭 (OFF) (0):输出已断电。 有关详细信息,请参见下文的“CBCM - 接通输出 1”和“CBCM - 切断输出 1”部分。 |
Continuous Armed (CA) | BOOL | 当指令配置为“装备后立即”、“装备后半个冲程”和“装备后一个半冲程”模式时,使用此输出。 ON (1):装备序列正在进行。 关闭 (OFF) (0):等待武备。 此参数与安全无关。 |
Diagnostic Code | DINT | 请参见下文的“CBCM - 诊断代码”部分。 此参数与安全无关。 |
重要提示:
在任何情况下,均不要对任何指令输出标签执行写操作。
操作
接通输出 1
当“启动”输入由 OFF (0) 跳变为 ON (1),并且满足以下所有条件时,输出 1 接通:
- 装备序列(如果配置)已完成。
- “使能”输入为 ON (1)。
- “安全使能”输入已应答。
- “标准使能”输入为 ON (1)。
- “滑块区域”输入表示顶部区域。
- “运动监视故障”输入为 ON (1)。
- “压力机运动中”输入为 OFF (0)。
- “安全使能应答”输入为 OFF (0)。
- “在顶部区域停止”输入为 ON (1)。重要提示: 如果应答类型为手动,则当“使能”输入由 OFF (0) 跳变为 ON (1) 时,需要应答“安全使能”输入,然后“启动”或“持续运行前装备”输入才会跳变为 ON (0)。
警告:
在配置了立即模式且应答类型为自动的情况下,如果当“启动”输入由 OFF (0) 跳变为 ON (1) 的同时,“安全使能”、“标准使能”、“滑块区域”、“压力机运动中”和“运动监视故障”输入返回激活或有效状态,则输出 1 接通。
警告:
在配置了“装备后立即”、“装备后半个冲程”或“装备后一个半冲程”模式且应答类型为自动的情况下,如果当“持续运行前装备”输入由 OFF (0) 跳变为 ON (1) 的同时,“安全使能”、“标准使能”、“滑块区域”、“压力机运动中”和“运动监视故障”输入返回 ON (1)(激活或有效状态),则启动五秒的装备时间。
警告:
决定滑块位置的凸轮开关由 CPM 指令进行监视。该指令以 CPM 指令的“滑块区域”输出来表示决定滑块位置的凸轮开关。
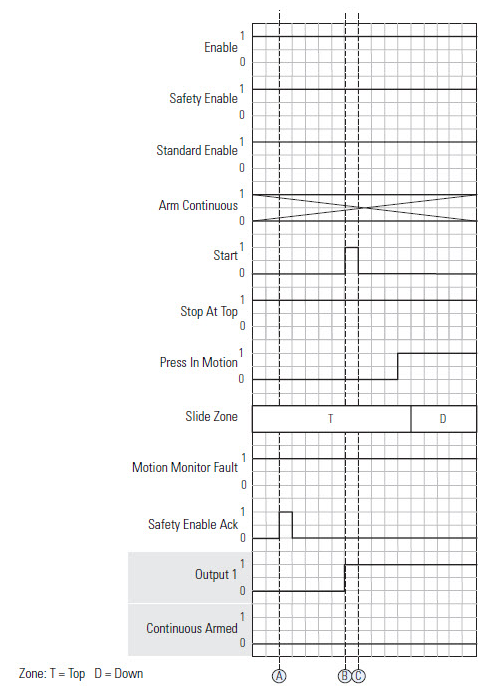
“立即”模式
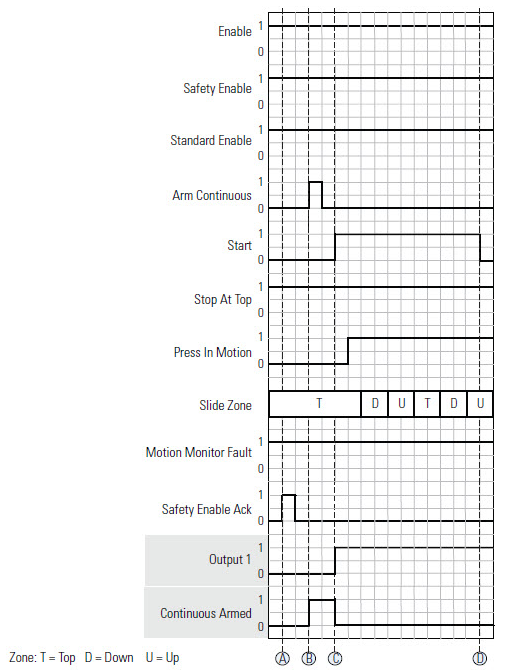
以下时序图说明了在“立即”模式下 (A) 点处的“安全使能”输入应答行为及输出 1 接通行为。在 (B) 点,“启动”输入由 OFF (0) 跳变为 ON (1),并且满足所有输入条件,因此输出 1 接通。在 (C) 点,“启动”输入跳变为 OFF (0),输出 1 保持接通。
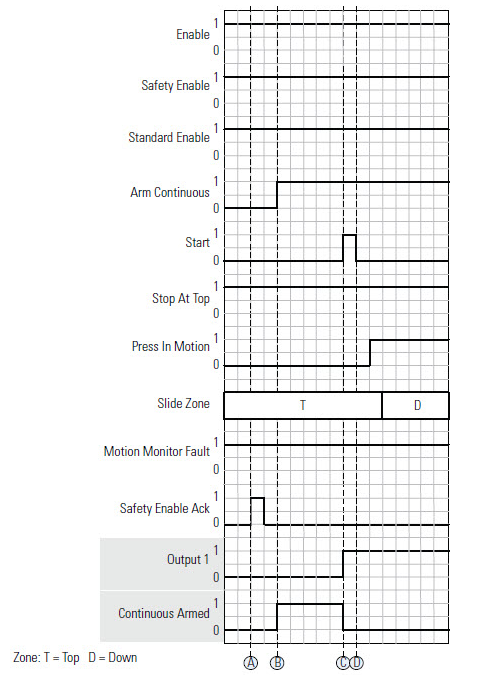
“装备后立即”模式
以下时序图说明了在“装备后立即”模式下 (A) 点处的“安全使能”输入应答行为及输出 1 接通行为。在 (B) 点,“持续运行前装备”输入由 OFF (0) 跳变为 ON (1),并且满足所有输入条件,因此启动五秒装备时间计时器。在 (C) 点,在五秒钟内,当“启动”输入由 OFF (0) 跳变为 ON (1),并且满足所有输入条件时,输出 1 接通。在 (D) 点,当“启动”输入跳变为 OFF (0) 时,输出 1 保持接通。
“装备后半个冲程”模式
以下时序图说明了在“装备后半个冲程”模式下 (A) 点处的“安全使能”输入应答行为及输出 1 接通行为。在 (B) 点,“持续运行前装备”输入由 OFF (0) 跳变为 ON (1),并且满足所有输入条件,因此启动五秒装备时间计时器。在 (C) 点,在五秒钟内,当“启动”输入由 OFF (0) 跳变为 ON (1),并且满足所有输入条件时,输出 1 接通。在 (D) 点,滑块移动半个冲程后“启动”输入跳变为 OFF (0),输出 1 保持接通。
“装备后一个半冲程”模式
以下时序图说明了在“装备后一个半冲程”模式下 (A) 点处的“安全使能”输入应答行为及输出 1 接通行为。在 (B) 点,“持续运行前装备”输入由 OFF (0) 跳变为 ON (1),并且满足所有输入条件,因此启动五秒装备时间计时器。在 (C) 点,在五秒钟内,当“启动”输入由 OFF (0) 跳变为 ON (1),并且满足所有输入条件时,输出 1 接通。在 (D) 点,滑块移动一个半冲程后“启动”输入跳变为 OFF (0),输出 1 保持接通。
切断输出 1
输出 1 接通后,当发生以下一种或多种情况时会切断:
- “使能”输入由 ON (1) 跳变为 OFF (0)。
- 进入连续运行前,“启动”输入由 ON (1) 跳变为 OFF (0)。如果此跳变发生在滑块处于上行区域时,则当滑块进入顶部区域时,输出 1 切断。否则,输出 1 立即切断。
- “安全使能”输入由 ON (1) 跳变为 OFF (0)。
- 如果此跳变发生在滑块处于上行区域且启用交接模式时,则当滑块进入顶部区域时,输出 1 切断。否则,当交接模式禁用时,输出 1 立即切断。如果此跳变发生在滑块处于顶部区域或下行区域时,输出 1 也会立即切断。
- “标准使能”输入由 ON (1) 跳变为 OFF (0)。如果此跳变发生在滑块处于上行区域时,则当滑块进入顶部区域时,输出 1 切断。否则,输出 1 立即切断。
- “滑块区域”输入值变为无效。
- 运动监视故障输入由 ON (1) 跳变为 OFF (0)。
- 压力机变为反向运行。
- 当滑块从顶部区域进入下行区域时,“压力机运动中”输入处于 OFF (0) 状态。
- “在顶部区域停止”输入由 ON (1) 跳变为 OFF (0),而滑块进入顶部区域。
- “压力机运动中”输入由 ON (1) 跳变为 OFF (0)。
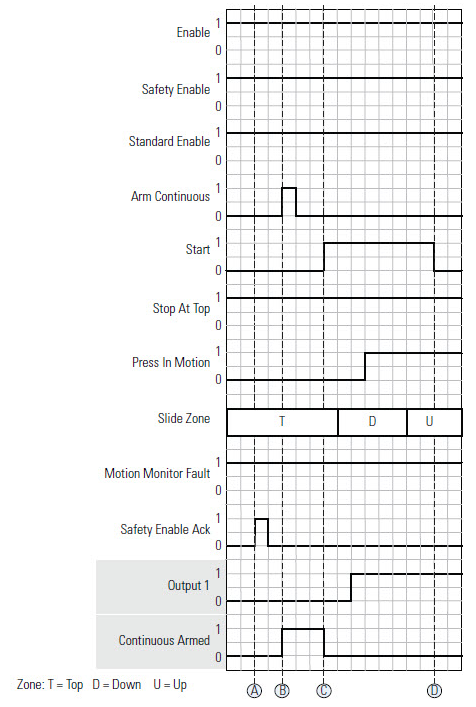
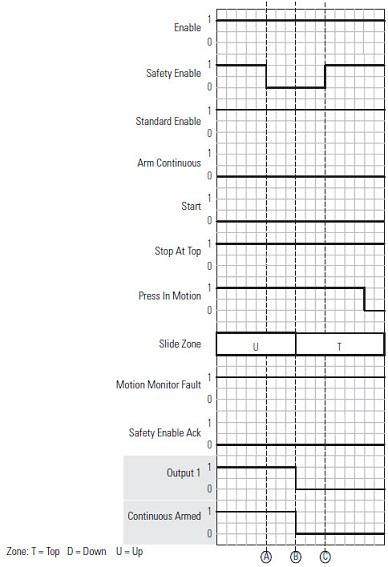
安全使能和交接模式
以下时序图显示,当滑块进入顶部区域时,输出 1 切断((B) 点)。在 (A) 点,当滑块处于上行区域时,“安全使能”输入由 ON (1) 跳变为 OFF (0),并且已启用交接模式,因此输出 1 切断。在 (C) 点,当“安全使能”输入由 OFF (0) 跳变为 ON (1) 时,需要应答“安全使能”输入,此后输出 1 才可以重新接通。
假梯级状态行为
在假梯级执行该指令时,所有指令输出均切断。
诊断代码与纠正措施
尝试通过接通输出 1 启动压力机运动时,检测诊断代码 16#2000...16#200A。
通过切断输出 1 停止压力机运动时,使用诊断代码 16#2020...16#202D 来诊断原因。
诊断代码采用十六进制格式,后面跟有十进制格式。
Diagnostic Code | 说明 | 纠正措施 | |
|---|---|---|---|
0 | 无故障。 | 无。 | |
16#2000 8192 | “立即”模式 | 由于“滑块区域”输入值无效,当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | Check the Crankshaft Position Monitor (CPM) instruction or the application logic used to source this input. This diagnostic is cleared when a valid Slide Zone is established. |
装备模式 |
| ||
16#2001 8193 | “立即”模式 | 由于“压力机运动中”输入为 ON (1),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 |
|
装备模式 |
| ||
16#2002 8194 | “立即”模式 |
|
|
装备模式 |
| ||
16#2003 8195 | “立即”模式 | 由于“标准使能”输入为 OFF (0),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | Verify that the devices used to source the Standard Enable input are functioning properly. This diagnostic is cleared when the Standard Enable input is ON (1). |
装备模式 |
| ||
16#2004 8196 | “立即”模式 | 不适用 | Turn the Start input OFF (0) and turn the Arm Continuous input ON (1) to clear this diagnostic. |
装备模式 | 当“持续运行前装备”输入跳变为 ON (1) 时,“启动”输入为 ON (1)。 | ||
16#2005 8197 | “立即”模式 | 不适用 | Turn the Arm Continuous input ON (1) to restart the arming timer and clear this diagnostic. |
装备模式 | 在“持续运行前装备”输入跳变为 ON (1) 后,“启动”输入未在五秒钟内跳变为 ON (1)。 | ||
16#2006 8198 | “立即”模式 | 不适用 | The Arm Continuous input must turn ON (1) before the Start input does. Turn the Start input OFF (0) and turn the Arm Continuous input ON (1) to clear this diagnostic. |
装备模式 | 在“持续运行前装备”输入尚未跳变为 ON (1) 时,“启动”输入即跳变为 ON (1)。 | ||
16#2007 8199 | “立即”模式 | 由于“在顶部区域停止”输入为 OFF (0),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | Turn the Stop At Top input OFF (0) and turn the Arm Continuous input ON (1) to clear this diagnostic. |
装备模式 |
| ||
16#2008 8200 | “立即”模式 | 由于“运动监视故障”输入为 OFF (0),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | Check the Camshaft Monitor (CSM) instruction or the application logic used to monitor press movement. This diagnostic is cleared when the motion monitor functions are properly monitoring motion and the Motion Monitor Fault input is ON (1). |
装备模式 |
| ||
16#2009 8201 | “立即”模式 | 由于安全使能应答输入为 ON (1),当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | Turn the Safety Enable Ack input OFF (0). This diagnostic is cleared when the Safety Enable Ack input turns OFF (0). |
装备模式 |
| ||
16#200A 8202 | “立即”模式 | 由于滑块处于下行区域或上行区域,当“启动”输入跳变为 ON (1) 时,输出 1 无法接通。 | The slide must be in the Top zone when press movement is initiated. This diagnostic is cleared when the slide is inched back to the Top zone. |
装备模式 |
| ||
16#2020 8224 | 由于“滑块区域”输入值变为无效,输出 1 切断。 | 检查用于决定此输入的“曲柄轴位置监视”(CPM) 指令或应用逻辑。 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#2021 8225 | 由于“运动监视故障”输入跳变为 OFF (0),输出 1 切断。 | 检查“凸轮轴监视”(CSM) 指令或用于监视压力机运动的应用逻辑。 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#2022 8226 | 由于检测到压力机反向运动,输出 1 切断。 | 检查压力机的运动方向。 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#2023 8227 | 由于滑块处于顶部区域或下行区域时“安全使能”输入跳变为 OFF (0),输出 1 切断。 | 检查用于提供“安全使能”输入的 AOPD 和 ESPE 目前是否为其相应区域提供保护。 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#2024 8228 | 由于滑块处于顶部区域或下行区域时“标准使能”输入跳变为 OFF (0),输出 1 切断。 | 检查用于提供“标准使能”输入的设备和应用逻辑是否正常工作。 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#2025 8229 | 立即数 | 不适用 | Output 1 is always de-energized when the Start input turns OFF (0) while the slide is in the Top or Down zones. This diagnostic is cleared at the next attempt to begin press movement. |
装备后立即 | |||
“装备后半个冲程”模式 | 滑块处于顶部区域或下行区域时,“启动”输入在进入连续运行之前跳变为 OFF (0),因此输出 1 切断。 | ||
“装备后一个半冲程”模式 | |||
16#2026 8230 | 未被此指令使用。 | ||
16#2027 8231 | 如果在滑块处于顶部区域且交接模式已禁用时,“安全使能”输入跳变为 OFF (0),输出 1 立即切断。 | 检查用于提供“安全使能”输入的 AOPD 和 ESPE 目前是否为其相应区域提供保护。 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#2028 8232 | 由于在滑块处于上行区域时“标准使能”输入跳变为 OFF (0),当滑块进入顶部区域时,输出 1 切断。 | 检查用于提供“标准使能”输入的设备和应用逻辑 是否正常工作。 此诊断代码在下次尝试开始压力机运动时 被清除。 | |
16#2029 8233 | 如果在滑块处于上行区域时“启动”输入在进入连续运行之前跳变为 OFF (0),且交接模式已禁用,则输出 1 立即切断。 | 此诊断代码在下次尝试开始压力机运动时被清除。 | |
16#202A 8234 | 滑块在发出停止请求之后进入了顶部区域,因此输出 1 切断。 | 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#202B 8235 | “压力机运动中”输入在滑块进入下行区域时仍保持 OFF (0),或“压力机运动中”输入从 ON (1) 跳变至 OFF (0),因此输出 1 切断。 | 检查“凸轮轴监视”(CSM) 指令或用于监视压力机运动的应用逻辑。在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#202C 8236 | 如果在滑块处于上行区域且交接模式已启用时,滑块进入顶部区域且“安全使能”输入跳变为 OFF (0),输出 1 切断。 | 检查用于提供“安全使能”输入的 AOPD 和 ESPE 目前是否为其相应区域提供保护。 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
16#202D 8237 | 如果在滑块处于上行区域时“启动”输入在进入连续运行之前跳变为 OFF (0),且交接模式已启用,则输出 1 在滑块进入顶部区域时切断。 | 在下次尝试启动压力机运动时,此诊断代码被清除。 | |
影响数学状态标志
否
严重/轻微故障
没有特定于此指令的故障。请参见“数组索引编制”,了解关于数组索引故障的信息。
执行
条件/状态 | 执行的操作 |
|---|---|
预扫描 | 与梯级输入条件为假时相同 |
梯级输入条件为假 | .O1 和 .CA 设置为假。 “诊断代码”输出设为 0。 |
梯级输入条件为真 | 此指令按正常运行部分所述执行。 |
后扫描 | 与梯级输入条件为假时相同 |
示例
提供反馈