程序/操作员控制
以下指令支持程序/操作员控制的概念。
- 增强型选择 (ESEL)
- 累加器 (TOT)
- 增强型 PID (PIDE)
- 升温/持温 (RMPS)
- 离散 2 态设备 (D2SD)
- 离散 3 态设备 (Discrete 3-State Device, D3SD)
程序/操作员控制允许用户同时从用户程序和操作员界面设备执行对这些指令的控制。当处于程序控制时,指令由指令的程序输入来控制;当处于操作员控制时,指令由指令的操作员输入来控制。
程序或操作员控制通过使用以下输入来确定。
输入 | 说明 |
.ProgProgReq | 进入程序控制的程序请求。 |
.ProgOperReq | 进入操作员控制的程序请求。 |
.OperProgReq | 进入程序控制的操作员请求。 |
.OperOperReq | 进入操作员控制的操作员请求。 |
要确定指令是处于程序控制还是操作员控制,请检查 ProgOper 输出。如果 ProgOper 置位,则指令处于程序控制;如果 ProgOper 清零,则指令处于操作员控制。
如果两个输入请求位均置位,则操作员控制的优先级高于程序控制。例如,如果 ProgProgReq 和 ProgOperReq 均置位,则指令进入操作员控制。
程序请求输入的优先级高于操作员请求输入。因而可使用 ProgProgReq 和 ProgOperReq 输入将指令“锁定”在所需控制下。
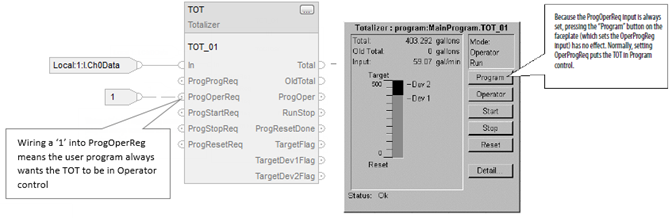
例如,假定一条累加器指令始终处于操作员控制下,并且用户程序始终不控制该累加器的运行或停止。在这种情况下,可将字面值 1 连接到 ProgOperReq。这将防止操作员通过从操作员界面设备将 OperProgReq 置位来将累加器置于程序控制下。
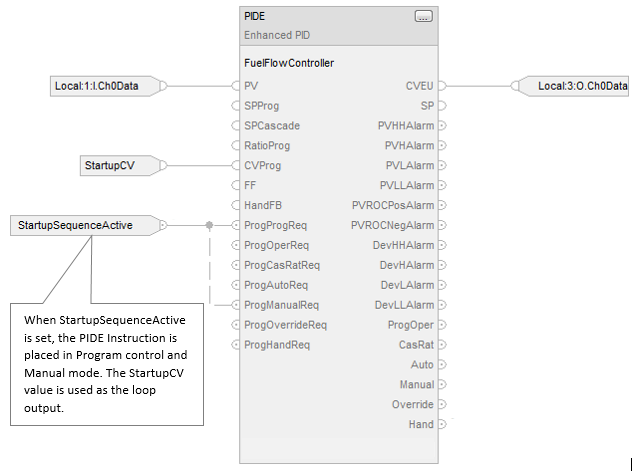
同样,始终将 ProgProgReq 置位可以将指令“锁定”在程序控制下。当用户想让程序控制指令的动作而无需担心操作员意外控制指令时,这对于自动启动序列十分有用。
在此示例中,用户在启动时使用程序来置位 ProgProgReq 输入,然后在启动完成后清零 ProgProgReq 输入。ProgProgReq 输入清零后,指令将保持在程序控制下,直到它接收到变更请求。例如,操作员可以通过面板置位 OperOperReq 输入以控制该指令。
以下示例显示了如何将指令锁定在程序控制下。
指令的操作员请求输入始终在指令执行时被指令清零。这使得操作员界面可以只通过置位所需模式请求位来使用这些指令。用户无需编程操作员界面来复位请求位。例如,如果操作员界面置位 PIDE 指令的 OperAutoReq 输入,当 PIDE 指令执行时,它将确定适当的响应并清零 OperAutoReq。
程序请求输入通常不由指令清零,因为它们通常作为输入连接到指令。如果指令清零这些输入,则输入将重新由所连接的输入置位。有可能出现这样的情况,用户想由指令来清零程序请求,从而使用其他逻辑来置位程序请求。在这种情况下,用户可以置位 ProgValueReset 输入,指令在执行时始终会清零程序模式请求输入。
在本示例中,另一例程中的梯形图逻辑梯级用于在按下按钮时以单脉冲触发形式闭锁 PIDE 指令的 ProgAutoReq。
按下 TIC101AutoReq 按钮后,将以单脉冲触发形式闭锁 PIDE 指令 TIC101 的 ProgAutoReq。TIC101 已经在 ProgValueReset 输入被置位的情况下配置。ProgAutoReq 会复位,因为 ProgValueReset 始终置位。

提供反馈