速度环信号属性
下面是与运动控制轴相关的速度控制信号属性。
给定速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取 | T | REAL | - | - | - | 速度控制单位/秒 |
“给定速度”属性代表在速度环控制期间由给定值精插补发生器(如果激活)输出至速度环的给定速度值,或者在频率控制期间输出至频率控制器的给定速度值。
速度调整
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 设置 | T | REAL | 0 | -maxspd | maxspd | 速度控制单位/秒 |
加到速度环求和点的附加给定速度。
给定加速度前馈
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - PV | 获取 | T | REAL | - | - | - | 速度控制单位/秒 2 |
“给定加速度前馈”属性是表示缩放后的给定加速度曲线的给定加速度前馈信号。该信号是在给定加速度精插补信号基础上经 Kaff 缩放后而得出,应用于速度环输出端。
速度参考值
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取 | T | REAL | - | - | - | 速度控制单位/秒 |
该值代表将加到速度环求和点的给定速度参考值,或者在频率控制模式下,该信号经过变换得到频率参考值。
速度反馈
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - ED | 获取 | T | REAL | - | - | - | 速度控制单位/秒 |
应用于速度求和点的轴实际速度(如果适用),具体取决于控制模式选择。在大多数情况下,速度反馈信号直接来自反馈模式属性所指定的反馈设备。如果轴配置为“仅反馈”模式,则速度反馈表示主反馈选择指定的反馈设备的实际速度。如果轴配置为“频率控制”模式,则速度反馈信号将来自速度参考信号。如果配置为“无传感器速度环”操作,即“反馈模式”设置为“无反馈”,则无传感器控制算法会估算速度反馈。
速度误差
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - PV | 获取 | T | REAL | - | - | - | 速度控制单位/秒 |
速度参考值与速度反馈值之间的误差,即速度环求和点的输出。
速度积分器输出
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - PV | 获取 | T | REAL | - | - | - | 加速度控制单位/秒 2 |
速度积分器的输出,表示速度积分器对速度环输出的作用。
速度环输出
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - PV | 获取 | T | REAL | - | - | - | 加速度控制单位/秒 2 |
速度环正向路径的输出,表示速度环的总体控制作用。
速度限制源
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - PV | 获取 | T | USINT | - | - | - | 枚举值: 0 = 无限制 1 = 正向限制 2 = 负向限制 3 = 母线过压限制 4 = 最大扩展速度限制 5-127 = 保留 128 - 255 = 供应商专用 |
“速度限制源”属性是一个枚举值,用于指定有效速度限制的来源。
速度限制器扩展
在永磁 (PM) 电机的应用中,有时需要驱动器进一步扩展速度限制器功能,以便在电机速度超出额定值的状况下,保护驱动器电子器件和电机免受潜在破坏性超速状况的影响。速度限制器用于在高速应用中对驱动器和电机提供保护。
PM 电机转矩-转速特性曲线
常规的 PM 电机转矩-转速特性曲线如下图所示。所示两条曲线分别代表电机的连续转矩 (T
c
) 和峰值转矩 (Tp
) 能力。PM 电机通常根据额定电压和连续转矩指定“额定速度”(Sr),根据最大电机工作速度指定“最大速度”(Sm)。电机的指定额定速度和最大速度通常设置为相同的值。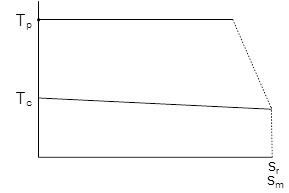
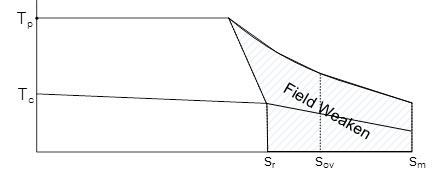
弱磁
PM 电机也可采用“弱磁”技术运行,以扩展电机的最高速度能力。弱磁技术通过主动电流矢量控制来降低永磁体的有效磁场强度,以降低转矩为代价获得更大的速度。尽管采用弱磁技术来扩展电机速度范围更多地用于内置式 PM (IPM) 电机,但这种方式也可以扩展表面式 PM (SPM) 电机的速度范围。下图所示为采用弱磁技术的 PM 电机转矩-速度曲线。
当驱动器对 PM 电机采用弱磁技术以达到高于额定值的速度时,驱动器的电机电流矢量控制算法将有效地降低电机的 Ke。这会将反电动势 (CEMF) 电压降至直流母线电压以下。但如果突然移除这种主动电流矢量控制,Ke 值将恢复到额定值,CEMF 电压将迅速增高。每当功率组件禁用时,电机电流的主动控制就将丧失。因此,当功率组件禁用而电机仍在旋转时,就将产生问题。如果因控制过程启动禁用请求、严重故障动作或安全转矩中断激活,而使驱动器执行 0 类停止,则可能会出现这种情况。
上图显示了三个速度值。在第一张图中,额定速度 (S
r
) 是在额定电压和连续转矩下的运行速度。这是在不采用弱磁控制的情况下可以达到的最大连续转矩。SOV
是 Ke 标称值对应的 CEMF 电压等于驱动器最大直流母线电压额定值或直流母线过压限值时的速度。如果在电机以高于 S
OV
的速度运行时移除主动电机电流控制,则 CEMF 电压会导致出现直流母线过压状况,从而可能损坏驱动器以及其他共享直流母线的设备。S
m
是基于机械限制的电机绝对最大工作速度。对于旋转电机,“旋转电机最大速度”属性提供 Sm。当允许 PM 电机以介于 S
OV
和 Sm
之间的速度运行,并且禁用驱动器的功率组件时,会对连接到直流母线的设备造成严重损坏。速度限制器行为示意图
在下图中,速度限制器已得到进一步扩展,可帮助管理高速 PM 电机运行的固有风险。除现有可用于限制速度参考信号的“速度限制 - 正向/负向”属性外,基于上面定义的 S
OV
和 Sm
值还定义了两个新的限制值。具体而言,“旋转 PM 电机 - 母线过压速度”和“线性 PM 电机母线过压速度”属性为 SOV
所对应的速度参考信号提供了一个绝对的限制值。只有在“允许 PM 电机扩展速度”属性设置为真时,才可以超出此速度限制。“旋转 PM 电机最大扩展速度”和“线性 PM 电机最大扩展速度”为 Sm
所对应的速度参考信号提供了一个绝对的限制值。速度限制功能限定速度参考信号不超出这些属性值中的最小值。“速度限制源”属性指定了速度限制的来源。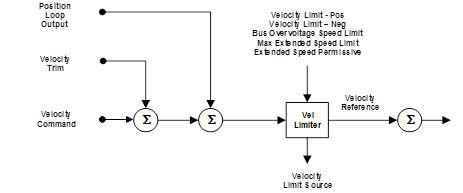
对速度限制器功能进行这些扩展后,支持弱磁技术的驱动器经过配置可以对扩展速度下的运行进行管理,只有相应设置“允许 PM 电机扩展速度”属性,才允许以超过 SOV 的速度运行。能够以超过 SOV 的速度安全运行的系统配有直流母线调节器或电阻制动模块。
提供反馈