速度控制模式
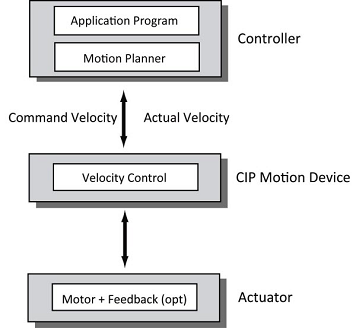
在“速度控制”应用模式下,应用控制程序和运动轨迹规划器将通过循环数据连接为 CIP Motion 设备提供设置点值。“速度控制”方法可采取开环或闭环形式。
开环速度控制方法
配置为开环速度控制的电机控制设备传统上称为变频驱动器、U/f 变频器或 VFD。
对于这种配置,可选配反馈设备。在不使用反馈设备的情况下,可由驱动器估算实际速度并将其返回给控制器。
闭环速度控制方法
配置为闭环速度控制的电机控制设备传统上称为速度闭环驱动器或速度伺服驱动器。由于闭环速度控制驱动器包含内部转矩/电流控制环,有时也称为矢量驱动器。
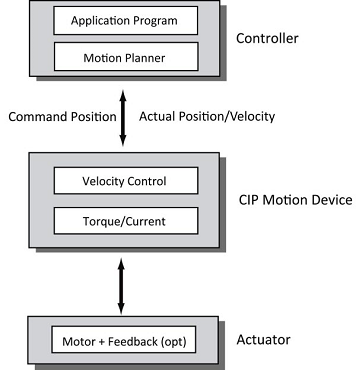
对于速度环设备配置,可选配反馈设备。如果使用反馈设备,尤其是低速情况下,可以实现更精确的调速。如果包含反馈设备,反馈设备可以通过循环数据连接将实际的位置、速度和加速度数据返回给控制器。而如果不包含反馈设备,通常只能将估算的速度返回给控制器。
除了给定速度外,控制器还可传递给定加速度,来实现前馈控制。
加速度控制方法
加速度控制模式既不是业界主流的控制模式,也未在 IEC 标准中提及,但由于运动控制轴对象可以支持来自于控制器运动轨迹规划器的给定加速度,并且为了反映从速度控制到转矩控制的完整动态过渡进程,本文将对这种控制模式加以介绍。在加速度控制模式下,应用控制程序和运动轨迹规划器将通过循环数据连接为 CIP Motion 设备提供加速度设置点值。驱动器使用估算的系统惯量将加速度设置点值转换为给定转矩。加速度控制与内部转矩/电流控制环协同工作,如图中所示。
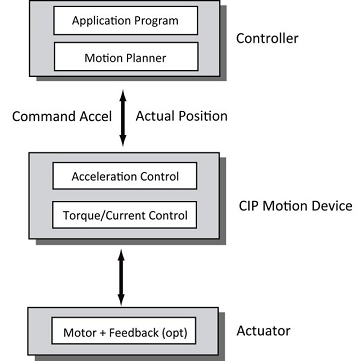
加速度控制配置中必须具有反馈设备,反馈设备可通过循环数据连接将实际的位置、速度和加速度数据返回给控制器。
提供反馈