转矩/力控制配置属性
下面是与运动控制轴相关的转矩/力控制配置属性。
自适应调谐配置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | USINT | 0 | - | - | 枚举值: 0 = 禁用 (R) 1 = 跟踪陷波 (R) 2 = 增益稳定 (O/PV) 3 = 跟踪陷波和增益稳定 (O/PV) 4 = 增益优化 (O/PV) 54-255 = 保留 |
“自适应调节配置”值用于控制自适应调节功能的操作。该功能可定期收集并分析扭矩参考信号数据,以识别系统中的共振和闭合回路不稳定性。
启用后,自适应调节功能最多可调整四个跟踪陷波滤波器,使共振衰减,还可以调整伺服回路增益和滤波器值,以改善和稳定控制回路。
在本节中,与四个扭矩陷波滤波器实例相关联的属性在属性名称中用“n”统一标识,其中 n 可以为 null(空)(对于实例 1),也可以为范围 2 到 4 的值(对于其他陷波滤波器实例)。“自适应调节跟踪陷波滤波器”属性值用于定义自适应调节功能可自动调整的扭矩陷波滤波器数量。例如,当“自适应调节跟踪陷波滤波器”设置为 3 时,“自适应调节”功能控制“扭矩陷波滤波器频率”、“扭矩陷波滤波器 2 频率”和“扭矩陷波滤波器 3 频率”的值,但不会影响“扭矩陷波滤波器 4 频率”。
每次自适应调节更新期间(标称更新周期为 1 秒),可使自适应调节功能根据检测到的情况调整一个控制参数。具体而言,在任何给定更新中,该功能只能调整“自适应调节增益缩放系数”、“扭矩低通滤波器带宽”或“单扭矩陷波滤波器”实例。自适应调节功能确定根据大小受所配置的“自适应调节跟踪陷波滤波器”属性值约束的 FIFO 缓冲区更新的扭矩陷波滤波器实例。
当“自适应调节配置”设置为“禁用”时,控制器配置的伺服回路增益和滤波器属性值将直接应用于关联轴的控制结构,而无需自适应调节功能干预。但是,自适应调节功能会继续将“扭矩陷波滤波器频率估计”设置为确定共振频率,将共振幅值加载到“扭矩陷波滤波器幅值估计”中,并将估计宽度加载到“扭矩陷波滤波器宽度估计”中。
当“自适应调节配置”设置为“跟踪陷波”时,自适应调节功能将自动调整多达四个扭矩陷波滤波器,以衰减检测出的每个共振频率。具体而言,扭矩陷波滤波器“n”频率估计属性值由自适应调节功能确定,应用于关联陷波滤波器的扭矩陷波滤波器“n”频率值,从而覆盖控制器配置的扭矩陷波滤波器“n”频率值。此外,自适应调节功能将扭矩陷波滤波器“n”宽度估计属性值应用于扭矩陷波滤波器“n”宽度,将扭矩陷波滤波器“n”深度设为零,扭矩陷波滤波器“n”增益设为 1。执行此操作时,不会覆盖控制器配置的扭矩陷波滤波器“n”属性值,控制器配置的值也不会影响扭矩陷波滤波器“n”行为。所有其他控制器配置的伺服回路属性都直接应用,而无需自适应调节功能干预。
如果配置为“增益稳定”,则会根据需要自动调整伺服回路增益值和滤波器,以稳定控制回路。具体而言,“负载观测器带宽”、“负载观测器积分器带宽”、“速度回路带宽”、“速度回路积分器带宽”、“位置回路带宽”和“位置回路积分器带宽”属性值会按“自适应调节增益缩放系数”进行缩放。此外,还会将“扭矩低通滤波器带宽估计”值应用于“扭矩低通滤波器带宽”,以在必要时抑制高频(机械)共振。执行此操作时,不会覆盖这些属性的配置值,也不会对驱动器行为产生任何影响。在此配置下,会将“扭矩陷波滤波器”属性的控制器配置值直接应用于陷波滤波器,而无需自适应调节功能干预。
如果配置为“跟踪陷波和增益稳定”,自适应调节功能将自动调整多达四个扭矩陷波滤波器,以衰减检测出的每个共振频率,并会自动调整伺服回路增益值和滤波器以稳定控制回路。
当配置为“增益优化”时,自适应调节功能将自动调整多达四个扭矩陷波滤波器,以衰减检测出的每个共振频率。伺服回路增益值和滤波器也会自动调整,以稳定和优化控制回路的性能。
具体而言,扭矩陷波滤波器“n”频率估计属性值由自适应调节功能确定,应用于扭矩陷波滤波器“n”带宽。扭矩陷波滤波器“n”宽度估计属性值由自适应调节功能确定,应用于扭矩陷波滤波器“n”宽度,扭矩陷波滤波器“n”深度设置为零,扭矩陷波滤波器“n”增益设置为 1。“负载观测器带宽”、“负载观测器积分器带宽”、“速度回路带宽”、“速度回路积分器带宽”、“位置回路带宽”和“位置回路积分器带宽”属性会按“自适应调节增益缩放系数”进行缩放。此外,会将“扭矩低通滤波器带宽估计”的值应用于“扭矩低通滤波器带宽”。执行此操作时,不会覆盖这些属性的配置值,也不会对驱动器行为产生任何影响。
当“自适应调节配置”发生更改以启用“跟踪陷波滤波器”功能时,自适应调节功能所控制的扭矩陷波滤波器“n”频率估计值和扭矩陷波滤波器“n”宽度估计值会分别初始化为控制器配置的扭矩陷波滤波器“n”频率和扭矩陷波滤波器“n”宽度属性值。
启用自适应调节功能后,驱动器在驱动器重新启动、网络断开连接/重新连接或控制器下载期间,将保持该功能的最后工作属性值。此规则的少数例外情况之一是电机 ID 发生更改,在这种情况下,最后工作属性值将重新初始化为控制器配置的值。另一种异常与测试服务有关。运行测试服务时,通常会在测试进行期间绕过扭矩参考滤波器(包括陷波滤波器和低通滤波器)。此类测试完成后,自适应调节功能的工作属性值将重新初始化为控制器配置的值。
自适应调节功能定期运行以在轴处于“正在运行”状态时收集并分析扭矩参考信号数据,即使“自适应调节配置”设置为“禁用”时也如此。当禁用时,自适应调节功能将“扭矩陷波滤波器频率估计”设置为识别出的幅值最大且符合所配置陷波滤波器调节标准的共振频率。共振幅值将加载到扭矩陷波滤波器幅值估计值中,估计宽度将加载到扭矩陷波滤波器宽度估计值中。如果未禁用,自适应调节功能将扭矩陷波滤波器“n”频率估计值设置为识别出的幅值最大且符合所配置陷波调节标准的共振频率。共振幅值将加载到扭矩陷波滤波器“n”幅值估计值中,估计宽度将加载到扭矩陷波滤波器宽度估计值中。每次执行自适应调谐功能时,都会更新“CIP 轴内部状态 RA”属性中的“自适应调谐”状态位。
配置的陷波滤波器调节标准为,共振频率的幅值(与给定信号无关)高于所配置的“扭矩陷波滤波器调节阈值”,并且共振频率介于所配置的“扭矩陷波滤波器频率下限”和“扭矩陷波滤波器频率上限”之间。
当驱动器轴处于除“正在运行”状态以外的任何其他状态时,自适应调节功能会清除其采样历史记录,复位自适应调节内部逻辑并暂停操作。当暂停时,自适应调节功能保留输出估计值(扭矩陷波滤波器“n”频率估计值、扭矩陷波滤波器“n”幅值估计值、扭矩陷波滤波器“n”宽度估计值和扭矩低通滤波器带宽估计值,以及自适应调节增益缩放系数)。当操作暂停时,还保留所有自适应调节功能的轴状态位的值。
当“自适应调节配置”更改为禁用“增益稳定”或“增益优化”功能时,“自适应调节增益缩放系数”将重置为 1。在这种情况下,控制所配置的扭矩陷波滤波器“n”频率、“扭矩低通滤波器带宽”、“负载观测器带宽”、“负载观测器积分器带宽”、“速度回路带宽”、“速度回路积分器带宽”、“位置回路带宽”和“位置环积分器带宽”属性的值将直接应用于控制回路结构,无需自适应调节功能的干预。
当“自适应调节配置”更改为禁用“跟踪陷波滤波器”功能时,控制器配置的扭矩陷波滤波器“n”属性值会应用于扭矩陷波滤波器,无需自适应调节功能的干预。
当检测到中心频率介于“扭矩陷波滤波器频率下限”与“扭矩陷波滤波器频率上限”之间且幅值高于扭矩陷波滤波器调节阈值的高频共振时,将测量共振的中心频率和幅值,并将其分别置于扭矩陷波滤波器“n”频率估计值和扭矩陷波滤波器“n”幅值估计值中。还可以根据扭矩陷波滤波器频率估计值处于“扭矩陷波滤波器频率下限”与“扭矩陷波滤波器频率上限”之间的位置,通过在“扭矩陷波滤波器宽度最小值”和“扭矩陷波滤波器宽度最大值”之间插补值,来计算合适的陷波滤波器宽度并将其置于扭矩陷波滤波器“n”宽度估计值中。
当检测到中心频率低于扭矩陷波滤波器频率下限且幅值大于增益稳定扭矩限制阈值线(蓝色)的低频共振时,“增益稳定”将应用两个主要功能,直至低频共振振幅小于此阈值或出现不稳定。
- “增益稳定”可启用和调节扭矩低通滤波器,以抑制高频(机械)共振(如果确定高于频率下限)。在此处,会将“扭矩低通滤波器带宽估计”的值应用于“扭矩低通滤波器带宽”,而不是应用于“扭矩低通滤波器带宽”。带宽估计值从默认值递减,直至抑制所识别的共振,或直至出现低频(控制)共振或不稳定。
- “增益稳定”解谐控制回路增益,以抑制任何剩余的低频(控制)共振并稳定系统。
当“自适应调节配置”设置为“增益优化”时,自适应调节将根据需要应用“跟踪陷波”功能,必要时还会应用“增益稳定”或“增益优化”功能。
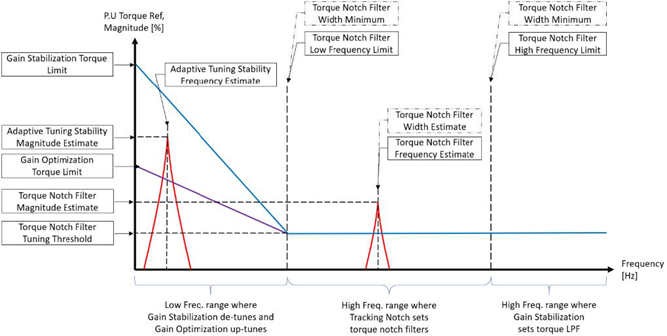
当检测到自适应调节稳定性幅值估计值小于增益优化扭矩限制阈值线(紫色)的低频共振时,“增益优化”会增大“自适应调节增益缩放系数”,其增量大于 1.0,直至低频共振幅值大于此阈值线。当“增益优化位置误差阈值”或“增益优化速度误差阈值”为零或“增益优化误差类型”设置为“无”时,该递增增量固定并等于增益优化缩放增量。
相比之下,当检测到自适应调节稳定性幅值估计值大于增益稳定扭矩限制阈值线的低频共振时,增益稳定会减小“自适应调节增益缩放系数”,其乘数增量为 0.75 倍,直至低频共振幅值低于阈值。
在位置模式下,“增益优化位置误差阈值”可设置为增大“自适应调节增益缩放系数”,其增量等于增益优化缩放增量 *(与误差成比例的比例尺),直至“自适应调节稳定性幅值估计值”大于“增益优化扭矩限制”线或直至位置误差小于“增益优化位置误差阈值”。
当“增益优化误差类型”设置为“峰值”时,将一直监控位置误差状况;当“增益优化误差类型”设置为“稳态”时,仅在稳态位置期间监控位置误差状况。当“增益优化位置误差阈值”设置为零或“增益优化误差类型”设置为“无”时,此功能处于禁用状态,增益缩放增量恢复为等于“增益优化缩放增量”的固定值。
在速度模式下,“增益优化速度误差阈值”可设置为增大“自适应调节增益缩放系数”,其增量等于增益优化缩放增量 *(与误差成比例的比例尺),直至“自适应调节稳定性幅值估计值”大于“增益优化扭矩限制”线或直至速度误差小于“增益优化速度误差阈值”。
当“增益优化误差类型”设置为“峰值”时,将一直监控速度误差状况;当“增益优化误差类型”设置为“稳态”时,仅在稳态速度期间监控速度误差状况。
当“增益优化速度误差阈值”设置为零或“增益优化误差类型”设置为“无”时,此功能处于禁用状态,增益缩放增量恢复为等于“增益优化缩放增量”的固定值。
可将计时器设置为经过“增益优化时间”设置的时段后从“增益优化”模式切换到“增益稳定”模式。这适用于在两个速度或操作点之间进行索引的循环应用程序。因此,速度较低则每个机器循环都会触发“增益优化”,速度较高则每个机器循环都会触发“增益稳定”,但是重复的增益稳定可能会导致性能下降,因为它会对瞬时不稳定性作出反应。
当“增益优化时间”设置为零时,此功能被禁用,这通常适用于恒定速度或非循环应用程序。当“自适应调节配置”切换为“跟踪陷波和增益稳定”,然后返回“增益优化”时,“增益优化”计时器重置。
当配置为“增益优化”时,自适应调节功能将调整多达四个扭矩陷波滤波器,以衰减检测出的每个共振频率。伺服回路增益值和滤波器也会自动调整,以稳定和优化控制回路的性能。
自适应调节增益缩放系数最小值
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - PV | 设置/SSV | REAL | 0.1 | 0 | 1 |
当自适应调节功能处于活动状态并执行增益稳定时,“自适应调节增益缩放系数最小值”属性设置“自适应调节增益缩放系数”的下限。这会限制增益稳定功能可减小增益缩放系数的下限。
这样有助于防止“自适应调节增益稳定”算法将控制回路带宽减小到扭矩不足以有效控制负载的程度。
自适应调节跟踪陷波滤波器
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | USINT | 4 | 1 | 4 |
“自适应调节跟踪陷波滤波器”属性用于定义自适应调节功能从陷波滤波器实例 1 开始自动配置的扭矩陷波滤波器实例的数量。所有其他扭矩陷波滤波器实例均保持不变。
转矩偏移
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - C | 设置/SSV | REAL | 0 | -100 | +100 | 电机额定值 % |
“转矩偏移”属性用于在执行闭环控制时实现转矩偏置。该值会与每次连接更新时可同步发送至驱动器的“转矩调整”值相加。由于“转矩调整”值以模板化值形式提供,因此可以使用“转矩调整”属性实时校正转矩。
系统惯量
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - PV 可选 - T | 设置/SSV | T | REAL | 0 FD | 0 |  | 电机额定值百分比/(电机单位/秒 2 ) |
将给定加速度转换为等效额定转矩/力的转矩或力变换增益值。如果设置得当,该值可表示系统的总惯量或总质量。
扭矩校准系数 - 电动
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | T | REAL | 0 | 0 | | % |
“扭矩校准系数 - 电动”值校准扭矩参考信号,以匹配电机施加的实际扭矩。当驱动器施加正扭矩生成电流(即电动操作)时,将应用此校准系数。此值定义为扭矩参考信号的缩放调整百分比。例如,值 5% 表示扭矩参考信号乘以系数 1.05。
扭矩校准系数 - 再生
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | T | REAL | 0 | 0 | | % |
“扭矩校准系数 - 再生”值校准扭矩参考信号,以匹配电机施加的实际扭矩。当驱动器吸收负扭矩生成电流(即再生操作)时,将应用此校准系数。
此值定义为扭矩参考信号的缩放调整百分比。例如,值 5% 表示扭矩参考信号乘以系数 1.05。
回差反向偏移
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - P | 设置/SSV | REAL | 0 | 0 | | 位置单位 |
“回差反向偏移”属性值用于补偿由机械回差引入的位置误差。当轴在命令作用下反向运动时,回差会体现出来。在这样的反转期间,由于机器中存在机械间隙,较小的电机位移量不会通过传动装置或滚珠丝杠等转换为负载的位移。因此,控制系统指示的轴的实际位置与机械负载的真正位置之间存在误差,该误差等于因机械回差而丢失的位移。
若要补偿因机械回差引起的这种定位误差,可向运动轨迹规划器的给定位置加上由“回差反向偏移”属性指定的有方向偏移,然后再将位置发送至驱动器。
每当给定速度更改符号(反向)时,Logix 控制器都会对当前给定位置加上或减去此偏移值。这将导致伺服系统将电机移至回差窗口的另一端并啮合负载。务必注意,这种有方向偏移的应用对用户透明;此偏移不会对“给定位置”属性的值产生任何影响。如果将零值应用于“回差反向偏移”,则实际上是禁用了此功能。一旦通过非零值启用此功能,并且通过将给定运动反向使负载啮合后,更改“回差反向偏移”会导致向给定位置应用偏移校正时轴发生运动。
回差补偿窗口
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - P | 设置 | REAL | 0 | 0 | | 位置控制单位 |
围绕给定位置定义一个窗口。当“位置误差”的绝对值处于该窗口内时,有效的转矩/力变换增益 Kj 将按一定系数降低,此系数为“位置误差”和“回差补偿窗口”之比。当“位置误差”处于窗口之外时,将应用所配置的转矩变换增益 Kj。有效 Kj 的此变化会尝试补偿由于回差引起的系统惯量变化,从而消除变速箱振动
滑动摩擦力补偿
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 100 | 电机额定值 % |
与给定电流/转矩相加来抵消库仑摩擦力产生的影响的值。当“摩擦力补偿方法”受支持且设置为“已禁用”时,该属性不适用。
静态摩擦力补偿
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 100 | 电机额定值 % |
与给定电流/转矩相加来抵消静态摩擦力(有时称为“静摩擦力”)产生的影响的值。当“摩擦力补偿方法”受支持且设置为“已禁用”时,该属性不适用。
粘滞摩擦力补偿
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 100 | 电机额定值百分比/(电机单位/秒) |
与给定电流/转矩相加来抵消粘滞摩擦力(例如与速度成正比的摩擦力)的影响的值。当“摩擦力补偿方法”受支持且设置为“已禁用”时,该属性不适用。
摩擦力补偿方法
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | USINT | 0 | - | - | 枚举值: 0 = 禁用 (R) 1 = 扭矩参考 (O) 2 = 速度参考 (O/PV) 3 = 速度反馈 (O) 4-255 = 保留 |
“摩擦力补偿方法”属性选择用于摩擦力补偿的特定方法,或完全禁用该功能。
“扭矩参考值”选项用于配置摩擦力补偿功能,以使用扭矩参考信号的符号向电机施加附加扭矩,从而补偿摩擦力。
“速度参考值”选项用于配置摩擦力补偿功能,以使用速度参考信号来控制施加于电机的附加扭矩量,从而补偿摩擦力。
“速度反馈”选项用于配置摩擦力补偿功能,以使用速度反馈信号来控制施加于电机的附加扭矩量,从而补偿摩擦力。
如果不支持摩擦力补偿方法,则摩擦力补偿功能将恢复为添加摩擦力补偿方法之前的功能。这意味着摩擦力补偿仅根据转矩参考信号的符号运行。可能支持的“摩擦力补偿”属性仅限于“摩擦力补偿窗口”、“静态摩擦力补偿”、“滑动摩擦力补偿”和“粘滞摩擦力补偿”。
摩擦力补偿启动速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 速度单位 |
“摩擦力补偿启动速度”属性用于确定速度限制,一旦超出该速度,摩擦力补偿功能就开始向电机施加附加扭矩以补偿摩擦力。
满足启动速度条件时的初始摩擦力补偿扭矩由“摩擦力补偿 - 静态”值给定。摩擦力补偿将保持活动状态,直到速度信号的幅值下降到“启动速度”减去“摩擦力补偿滞后”值以下。
速度信号源可以是速度参考信号,也可以是速度反馈,具体取决于“摩擦力补偿方法”选项。
当不支持“摩擦力补偿方法”或其设置为“转矩参考信号”或“已禁用”时,该属性不适用。
摩擦力补偿滞后
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 速度单位 |
从“摩擦力补偿启动速度”值中减去“摩擦力补偿滞后”属性值以确定速度限制,一旦降至该速度以下,就禁止摩擦力补偿功能向电机施加附加扭矩以补偿摩擦力。
速度信号源可以是速度参考信号,也可以是速度反馈,具体取决于“摩擦力补偿方法”选项。
当不支持“摩擦力补偿方法”或其设置为“转矩参考信号”或“已禁用”时,该属性不适用。
摩擦力补偿脱离时间
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0.006 | 0 | | 秒 |
“摩擦力补偿脱离时间”属性用于设置一旦满足“摩擦力补偿启动速度”条件,摩擦力补偿功能施加附加扭矩(该附加扭矩等于“摩擦力补偿 - 静态”值)以从静态摩擦力保持状态中脱离的时间长度。
脱离时间到期后,摩擦力补偿方法施加的附加扭矩量将斜降至“摩擦力补偿 - 滑动”属性设置的值。(斜率特定于设备,不可配置)。此恒定非粘滞滑动摩擦力补偿扭矩加上与速度相关的粘滞摩擦力补偿扭矩(基于摩擦力补偿 - 粘滞值),以补偿电机移动时的这两个摩擦分量。
当不支持“摩擦力补偿方法”或其设置为“转矩参考信号”或“已禁用”时,该属性不适用。
摩擦力补偿窗口
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - P | 设置 | REAL | 0 | 0 | | 位置控制单位 |
围绕给定位置定义一个窗口。当“位置误差”的绝对值处于该窗口内时,有效的“摩擦力补偿”值将按一定系数降低,此系数为“位置误差”和“摩擦力补偿窗口”之比。当“位置误差”处于窗口之外时,或者当轴在命令的作用下运动时,将应用常规的摩擦力补偿算法。
仅当“摩擦力补偿方法”设置为“扭矩参考”或驱动器不支持“摩擦力补偿方法”属性时,该属性才适用。
运动电压反馈偏移限制
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - PVT | 设置/SSV* | REAL | 20 | 0 | 100 | 电机额定值 % |
使用电机电压反馈进行转矩控制时允许的最大电压偏移量。电压偏移量超过此值会导致电机电压反馈偏移量过大异常。
当电机电压反馈源配置为命令电压时不适用。
电机电压反馈偏移模式
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - PVT | 设置/SSV* | USINT | 0 | - | - | 枚举值: 0 = 静态 1 = 动态 |
确定何时测量电机电压反馈偏移量。该电压偏移量对应于电机相电压的不平衡量。该电压偏移量用于确定进行转矩控制的电机电压反馈。
静态:设置为静态时,不测量电压偏移量。当驱动器检测到值从动态变为静态时,测量一次电压偏移量(在下降沿测量)。
动态:当轴处于“已启用”状态时,连续测量电压偏移量。
当电机电压反馈源配置为命令电压时不适用。
电机电压反馈源
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - PVT | 设置/SSV* | USINT | 0 | - | - | 枚举值: 0 = 命令电压 1 = 转矩精度模块电压反馈 |
选择用于转矩控制的电机电压反馈源。
命令电压:没有测量或估计的电机电压反馈可用,因此使用命令值。
运动电压反馈阈值
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - PVT | 设置/SSV* | REAL | 0 | 0 | 100 | 电机额定值 % |
当电压反馈小于此阈值时,转矩控制会将电机电压反馈归零。当电压反馈超过此阈值时,转矩控制使用测得的电压反馈。
当电机电压反馈源配置为命令电压时不适用。
转矩超前滞后滤波器带宽
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 10 4 | 滤波频率单位 |
设置转矩参考信号超前-滞后滤波器的极点频率。该值为 0 时,将禁用滤波器。
转矩超前滞后滤波器增益
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 1 | 0 | |
设置转矩参考信号超前-滞后滤波器的高频增益。该值大于 1 时,将发挥超前功能,小于 1 时则发挥滞后功能。值为 0 时,将发挥一阶低通滤波器功能。该值为 1 时,将禁用滤波器。
转矩低通滤波器带宽
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | T | REAL | 0 FD | 0 | 10 4 | 滤波频率单位 |
应用于转矩参考信号的低通滤波器的转折频率。
转矩陷波滤波器频率
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 10 4 | 滤波频率单位 |
应用于转矩参考信号的陷波滤波器实例的中心频率。CIP Motion 规范的该对象版本最多支持 4 个串联的扭矩陷波滤波器实例。该属性值为 0 时,会禁用此滤波器。
扭矩陷波滤波器 2 频率
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 10 4 | 滤波频率单位 |
应用于转矩参考信号的陷波滤波器实例的中心频率。CIP Motion 规范的该对象版本最多支持 4 个串联的扭矩陷波滤波器实例。该属性值为 0 时,会禁用此滤波器。
扭矩陷波滤波器 3 频率
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 10 4 | 滤波频率单位 |
应用于转矩参考信号的陷波滤波器实例的中心频率。CIP Motion 规范的该对象版本最多支持 4 个串联的扭矩陷波滤波器实例。该属性值为 0 时,会禁用此滤波器。
扭矩陷波滤波器 4 频率
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 10 4 | 滤波频率单位 |
应用于转矩参考信号的陷波滤波器实例的中心频率。CIP Motion 规范的该对象版本最多支持 4 个串联的扭矩陷波滤波器实例。该属性值为 0 时,会禁用此滤波器。
扭矩陷波滤波器宽度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0.707 | 0 | | 请参见“语义” |
“扭矩陷波滤波器 1 宽度”属性用于设置扭矩陷波滤波器方程分母中的阻尼比 Zd,该值用于确定第 1 个扭矩陷波滤波器实例的陷波宽度。
信号衰减超过 3 dB 的频率范围可按如下方式计算:
宽度(赫兹)= 2 * 陷波滤波器频率 * 陷波滤波器宽度 * (1 - z
2
- .5z4
- z6
)。其中,
z = 陷波滤波器深度/陷波滤波器宽度
当陷波深度设置为 0 时,z = 0。
扭矩陷波滤波器深度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 请参见“语义” |
“扭矩陷波滤波器深度”属性用于设置扭矩陷波滤波器方程的分子中的阻尼比 Zn,该值确定第一个扭矩陷波滤波器实例的陷波深度。
中心频率的陷波滤波器深度可以按如下方式计算:
深度(分贝)= 20log10 (z)。
其中,
z = 陷波滤波器深度/陷波滤波器宽度
当扭矩陷波深度设置为 0 时,z = 0。
扭矩陷波滤波器增益
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 1 | 0 | | 请参见“语义” |
“扭矩陷波滤波器增益”属性用于设置第一个扭矩陷波滤波器实例的高频增益。对于陷波滤波器操作,该属性的值设置为 1。该值大于 1 时,将发挥超前-滞后滤波器功能;小于 1 时,将发挥滞后-超前滤波器功能。值为 0 时,将发挥低通滤波器功能。
扭矩陷波滤波器 2 宽度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0.707 | 0 | | 请参见“语义” |
“扭矩陷波滤波器 2 宽度”属性用于设置扭矩陷波滤波器方程分母中的阻尼比 Zd,该值用于确定第 2 个扭矩陷波滤波器实例的陷波宽度。
信号衰减超过 3 dB 的频率范围可按如下方式计算:
宽度(赫兹)= 2 * 陷波滤波器频率 * 陷波滤波器宽度 * (1 - z
2
- .5z4
- z6
)。其中,
z = 陷波滤波器深度/陷波滤波器宽度
当陷波深度设置为 0 时,z = 0。
扭矩陷波滤波器 2 深度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 请参见“语义” |
“扭矩陷波滤波器深度”属性用于设置扭矩陷波滤波器方程的分子中的阻尼比 Zn,该值确定第二个扭矩陷波滤波器实例的陷波深度。
中心频率的陷波滤波器深度可以按如下方式计算:
深度(分贝)= 20log10 (z)。
其中,
z = 陷波滤波器深度/陷波滤波器宽度
当扭矩陷波深度设置为 0 时,z = 0
扭矩陷波滤波器 2 增益
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 1 | 0 | | 请参见“语义” |
“扭矩陷波滤波器增益”属性用于设置第二个扭矩陷波滤波器实例的高频增益。对于陷波滤波器操作,该属性的值设置为 1。该值大于 1 时,将发挥超前-滞后滤波器功能;小于 1 时,将发挥滞后-超前滤波器功能。值为 0 时,将发挥低通滤波器功能。
扭矩陷波滤波器 3 宽度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0.707 | 0 | | 请参见“语义” |
“扭矩陷波滤波器 3 宽度”属性用于设置扭矩陷波滤波器方程分母中的阻尼比 Zd,该值用于确定第 3 个扭矩陷波滤波器实例的陷波宽度。
信号衰减超过 3 dB 的频率范围可按如下方式计算:
宽度(赫兹)= 2 * 陷波滤波器频率 * 陷波滤波器宽度 * (1 - z
2
- .5z4
- z6
)。其中,
z = 陷波滤波器深度/陷波滤波器宽度
当陷波深度设置为 0 时,z = 0。
扭矩陷波滤波器 3 深度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 请参见“语义” |
“扭矩陷波滤波器 3 深度”属性用于设置扭矩陷波滤波器方程的分子中的阻尼比 Zn,该值确定第三个扭矩陷波滤波器实例的陷波深度。
中心频率的陷波滤波器深度可以按如下方式计算:
深度(分贝)= 20log10 (z)。
其中,
z = 陷波滤波器深度/陷波滤波器宽度
当扭矩陷波深度设置为 0 时,z = 0
扭矩陷波滤波器 3 增益
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 1 | 0 | | 请参见“语义” |
“扭矩陷波滤波器增益”属性用于设置第三个扭矩陷波滤波器实例的高频增益。对于陷波滤波器操作,该属性的值设置为 1。该值大于 1 时,将发挥超前-滞后滤波器功能;小于 1 时,将发挥滞后-超前滤波器功能。值为 0 时,将发挥低通滤波器功能。
扭矩陷波滤波器 4 宽度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0.707 | 0 | | 请参见“语义” |
“扭矩陷波滤波器 4 宽度”属性用于设置扭矩陷波滤波器方程分母中的阻尼比 Zd,该值用于确定第 4 个扭矩陷波滤波器实例的陷波宽度。
信号衰减超过 3 dB 的频率范围可按如下方式计算:
宽度(赫兹)= 2 * 陷波滤波器频率 * 陷波滤波器宽度 * (1 - z
2
- .5z4
- z6
)。其中,
z = 陷波滤波器深度/陷波滤波器宽度
当陷波深度设置为 0 时,z = 0。
扭矩陷波滤波器 4 深度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 请参见“语义” |
“扭矩陷波滤波器 4 深度”属性用于设置扭矩陷波滤波器方程的分子中的阻尼比 Zn,该值确定第四个扭矩陷波滤波器实例的陷波深度。
中心频率的陷波滤波器深度可以按如下方式计算:
深度(分贝)= 20log10 (z)。
其中,
z = 陷波滤波器深度/陷波滤波器宽度
当扭矩陷波深度设置为 0 时,z = 0
扭矩陷波滤波器 4 增益
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 1 | 0 | | 请参见“语义” |
“扭矩陷波滤波器增益”属性用于设置第四个扭矩陷波滤波器实例的高频增益。对于陷波滤波器操作,该属性的值设置为 1。该值大于 1 时,将发挥超前-滞后滤波器功能;小于 1 时,将发挥滞后-超前滤波器功能。值为 0 时,将发挥低通滤波器功能。
转矩限制 – 正向
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - C | 设置/SSV | REAL | 100 FD | 0 | 10 3 | 电机额定值 % |
此正值用于确定可向电机施加的最大正转矩。如果设备尝试施加超过该值的转矩,则会将给定转矩钳位到该值。
转矩限制 – 负向
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - C | 设置/SSV | REAL | -100 FD | -10 3 | 0 | 电机额定值 % |
此负值用于确定可向电机施加的最大负转矩。如果设备尝试施加低于此限制的负转矩,则会将给定转矩钳位到该值。
转矩变化率限制
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 10 6 | 0 | | 电机额定值百分比/秒 |
限制转矩参考信号的变化率。
转矩阈值
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 90 FD | 0 | 10 3 | 电机额定值 % |
指定滤波后转矩参考信号幅值的阈值,当超出此阈值时,会导致“转矩阈值”状态位置位。
过转矩限制
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - D | 设置/SSV | REAL | 200 | 0 | 10 3 | 电机额定值 % |
转矩电流 Iq 反馈信号幅值的上限。如果 Iq 电流反馈信号大于该值的情况持续由“过转矩限制时间”属性指定的一段时间,将产生过转矩限制异常。如果在运行期间负载转矩突然增大,此功能可支持设备生成异常。如果轴承出现故障,达到硬挡块位置,或者出现其他机械故障,可能会发生这种情况。
过转矩限制时间
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - D | 设置/SSV | REAL | 0 | 0 | 10 3 | 秒 |
指定在生成过转矩限制异常之前,允许处于“过转矩限制”条件的时间。此属性的值为 0 将禁用对过转矩限制异常的监视和断言
欠转矩限制
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - D | 设置/SSV | REAL | 10 | 0 | 10 3 | 电机额定值 % |
转矩电流 Iq 反馈信号幅值的下限。如果 Iq 电流反馈信号小于该值的情况持续由“欠转矩限制时间”属性指定的一段时间,将产生欠转矩限制异常。如果在运行期间负载转矩突然减小,此功能可支持设备生成异常。例如,当负载耦合断开或张紧的网状材料断裂时,可能发生这种情况。
欠转矩限制时间
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - D | 设置/SSV | REAL | 0 | 0 | 10 3 | 秒 |
指定在生成欠转矩限制异常之前,允许处于“欠转矩限制”条件的时间。此属性的值为 0 将禁用对欠转矩限制异常的监视和断言。
扭矩估计交叉速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0.2*Eq 1 | 0 | | 速度单位 |
“扭矩估计交叉速度”属性是指扭矩估计器功能在两种用于计算“扭矩估计”属性值的不同估计方法之间转换的速度。
扭矩估计陷波 1 频率
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 100 | 0 | 10 4 | 滤波频率单位 |
“扭矩估计陷波 1 频率”属性用于控制施加于扭矩估计器输出(该输出产生滤波后的扭矩估计信号)的第一个陷波滤波器实例的中心频率。CIP Motion 规范的该对象版本最多支持 2 个串联的扭矩估计陷波滤波器实例。该属性值为 0 时,会禁用此滤波器实例。
扭矩估计陷波 1 宽度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 1 | 0 | | 请参见“扭矩陷波滤波器语义” |
“扭矩估计陷波 1 宽度”属性用于设置陷波滤波器方程分母中的阻尼比 Zd,该值用于确定第一个扭矩估计陷波滤波器实例的陷波宽度。
信号衰减超过 3 dB 的频率范围可按如下方式计算:
宽度(赫兹)= 2 * 陷波滤波器频率 * 陷波滤波器宽度 * (1 - z
2
- .5z4
- z6
)。其中,z = 陷波滤波器深度/陷波滤波器宽度
陷波滤波器深度设置为 0 时,z = 0。
扭矩估计陷波 1 深度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 请参见“扭矩陷波滤波器语义” |
“扭矩估计陷波 1 深度”属性用于设置陷波滤波器方程分子中的阻尼比 Zn,该值用于确定第一个扭矩估计陷波滤波器实例的陷波深度。
中心频率的陷波滤波器深度可以按如下方式计算:
深度(分贝)= 20log10 (z)。其中,z = 陷波滤波器深度/陷波滤波器宽度
陷波滤波器深度设置为 0 时,z = 0。
扭矩估计陷波 1 增益
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 请参见“扭矩陷波滤波器语义” |
“扭矩估计陷波 1 增益”属性用于设置第一个扭矩估计陷波滤波器实例的高频增益。对于陷波滤波器操作,该属性的值设置为 1。该值大于 1 时,将发挥超前-滞后滤波器功能;小于 1 时,将发挥滞后-超前滤波器功能。值为 0 时,将发挥低通滤波器功能。
扭矩估计陷波 2 频率
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | 10 4 | 滤波频率单位 |
“扭矩估计陷波 2 频率”属性用于控制施加于扭矩估计器输出(该输出产生滤波后的扭矩估计信号)的第二个陷波滤波器实例的中心频率。CIP Motion 规范的该对象版本最多支持 2 个串联的扭矩估计陷波滤波器实例。该属性值为 0 时,会禁用此滤波器实例。
扭矩估计陷波 2 宽度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0.707 | 0 | | 请参见“扭矩陷波滤波器语义” |
“扭矩估计陷波 2 宽度”属性用于设置陷波滤波器方程分母中的阻尼比 Zd,该值用于确定第二个扭矩估计陷波滤波器实例的陷波宽度。
信号衰减超过 3 dB 的频率范围可按如下方式计算:
宽度(赫兹)= 2 * 陷波滤波器频率 * 陷波滤波器宽度 * (1 - z
2
- .5z4
- z6
)。其中,z = 陷波滤波器深度/陷波滤波器宽度
陷波滤波器深度设置为 0 时,z = 0。
扭矩估计陷波 2 深度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 0 | 0 | | 请参见“扭矩陷波滤波器语义” |
“扭矩估计陷波 2 深度”属性用于设置陷波滤波器方程分子中的阻尼比 Zn,该值用于确定第二个扭矩估计陷波滤波器实例的陷波深度。
中心频率的陷波滤波器深度可以按如下方式计算:
深度(分贝)= 20log10 (z)。其中,z = 陷波滤波器深度/陷波滤波器宽度
陷波滤波器深度设置为 0 时,z = 0。
扭矩估计陷波 2 增益
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | 1 | 0 | | 请参见“扭矩陷波滤波器语义” |
“扭矩估计陷波 2 增益”属性用于设置第二个扭矩估计陷波滤波器实例的高频增益。对于陷波滤波器操作,该属性的值设置为 1。该值大于 1 时,将发挥超前-滞后滤波器功能;小于 1 时,将发挥滞后-超前滤波器功能。值为 0 时,将发挥低通滤波器功能。
齿槽补偿表
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | Struct { UINT, REAL [1024] } | - | - | - | Struct { Length, % Motor Rated [ ] } |
“齿槽补偿表”是一个值列表,代表电机在一个电周期内的齿槽扭矩曲线。数组的第 0 个元素对应于电角度 0。对于理想的无齿槽电机,其数组中所有元素的值均为 100%。如果值超过 100%,扭矩参考值会增大 1/Kt 增益;如果值低于 100%,则会减小 1/Kt 的增益。
扭矩陷波低通滤波器带宽最小值
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | Eq 18 | 1 | 10 4 | 滤波频率单位 |
“扭矩陷波低通滤波器带宽最小值”属性用于设置自适应调节功能的扭矩陷波滤波器频率估计值的上限。所确定固有共振的频率值必须低于该上限值,才能作为转矩陷波滤波器频率估计值。
转矩陷波滤波器频率上限
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | FD | 20 | 2*FD | 滤波频率单位 |
该属性用于设置自适应调谐功能的转矩陷波滤波器频率估计值的上限。所确定固有共振的频率值必须低于该上限值,才能作为转矩陷波滤波器频率估计值。
转矩陷波滤波器频率下限
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | REAL | FD | 20 | 2000 | 滤波频率单位 |
该属性用于设置自适应调谐功能的转矩陷波滤波器频率估计值的下限。所确定固有共振的频率值必须高于该上限值,才能作为转矩陷波滤波器频率估计值。
转矩陷波滤波器调谐阈值
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 设置/SSV | T | REAL | 5 | 0 | 100 | 电机额定值 % |
共振振幅必须超过转矩陷波滤波器调谐阈值,自适应调谐功能才会将该频率确定为共振频率。所确定固有共振频率的振幅必须高于该阈值,该频率才能作为转矩陷波滤波器频率估计值。
转矩陷波滤波器频率估计
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 获取 | T | REAL | - | - | - | 弧度/秒 |
该值表示最大振幅高于扭矩陷波滤波器调节阈值的共振频率。该值在自适应调节更新期间确定的“扭矩陷波滤波器频率下限”与“扭矩陷波滤波器频率上限”之间。
启用“跟踪陷波滤波器”功能可触发要应用于扭矩陷波滤波器的第一个实例的陷波滤波器频率估计值。
重新启动或重置驱动器会触发扭矩陷波滤波器频率估计值初始化为非易失性存储器中存储的最后一个已知值。
当“自适应调节配置”发生更改以启用“跟踪陷波滤波器”功能时,该属性将初始化为控制器配置的“扭矩陷波滤波器频率”值。
转矩陷波滤波器幅值估计
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 获取 | T | REAL | - | - | - | 电机额定值 % |
该值表示“自适应调节更新”确定的与“扭矩陷波滤波器频率估计值”关联的共振最大振幅。
在驱动器重新启动或重置后,该属性的值将初始化为非易失性存储器中存储的最后一个已知值。
转矩低通滤波器带宽估计
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 获取 | T | REAL | - | - | - | 弧度/秒 |
当自适应调谐配置设置为“增益稳定”或“跟踪陷波和增益稳定”时,该值表示转矩低通滤波器的带宽。自适应调节功能可修改该值。当自适应调谐配置由“禁用”或“跟踪陷波”变为“增益稳定”或“跟踪陷波和增益稳定”时,该值初始化为“转矩低通滤波器带宽”。当驱动器循环上电或复位时,转矩低通滤波器带宽估计值将初始化为零。
自适应调谐增益变换系数
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - PV | 获取/GSV | T | REAL | - | - | - | 应用的增益/配置的增益 |
当所选“自适应调节配置”启用增益稳定功能或增益优化功能时,该值根据自适应调节功能的指示按比例缩放相关轴的伺服回路增益属性。
在驱动器重新启动或重置后,该属性的值将初始化为非易失性存储器中存储的最后一个已知值。
当“自适应调节配置”改为禁用增益稳定功能时,该属性初始化为 1。
自适应调节增益状态
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
可选 - C | 获取/SSV | T | DWORD | - | - | - | 位映射: 0:检测到转矩陷波滤波器频率 1:扭矩陷波滤波器调节未成功 2:转矩陷波滤波器多个频率 3:低于转矩陷波滤波器频率下限 4:高于转矩陷波滤波器频率上限 5:自适应调节增益稳定 6:自适应调节增益优化计时器到期 7-31:保留 |
包含自适应调节状态位的位图。
当共振被确定在频率上下限之间且幅值高于调节阈值时,“检测到扭矩陷波滤波器频率”位将置位。否则,该位清零。当驱动器转换为“正在运行”状态时,该位也将清零。
如果跟踪陷波滤波器不补偿所有已确定的共振,则“扭矩陷波滤波器调节未成功”位将置位。否则,该位清零。当驱动器转换为“正在运行”状态,或者在“正在运行”状态下自适应调节由“禁用”模式转换为“正在跟踪陷波”模式之一时,该位也将清零。
当多个共振被确定在频率上下限之间且幅值高于调节阈值时,“扭矩陷波滤波器多频率”位将置位。否则,该位清零。当驱动器转换为“正在运行”状态时,该位也将清零。
当共振被确定低于频率下限且幅值高于调节阈值时,“扭矩陷波滤波器频率低于限制”位将置位。否则,该位清零。当驱动器转换为“正在运行”状态时,该位也将清零。
当共振被确定高于频率上限且幅值高于调节阈值时,“扭矩陷波滤波器频率高于限制”(位 4)将置位。否则,该位清零。当驱动器转换为“正在运行”状态时,该位也将清零。
当增益缩放系数不等于 1(这表示自适应调节正在控制低通滤波器并调整伺服回路增益来稳定系统)时,“自适应调节增益稳定”位将置位。否则,该位清零。当驱动器转换为“正在运行”状态时,该位也将清零。
在计时器到期后禁用增益优化时,“自适应调节增益优化计时器过期”位将置位。否则,该位清零。该位已置位后,自适应调节配置会自动从“增益优化”切换为“增益稳定性”。
提供反馈