位置控制模式
在“位置控制”应用模式中,应用控制程序(命令执行功能)或运动轨迹规划器(运动轨迹控制功能)将通过循环数据连接为 CIP Motion 设备提供设置点值。“位置控制”方法可采取开环或闭环形式。
开环位置控制方法
对于步进驱动器一类的驱动器设备,适合于配置开环位置控制。
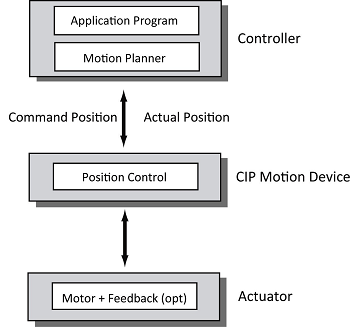
对于这种配置,可选配反馈设备。在不使用反馈设备的情况下,可由驱动器估算实际位置并将其返回给控制器。
闭环位置控制方法
配置为闭环位置控制的电机控制设备通常称为位置环驱动器或位置伺服驱动器。位置伺服驱动器包含内部速度和转矩控制环,如图中所示。由于存在转矩/电流控制环,因此此类驱动器有时也称为矢量驱动器。
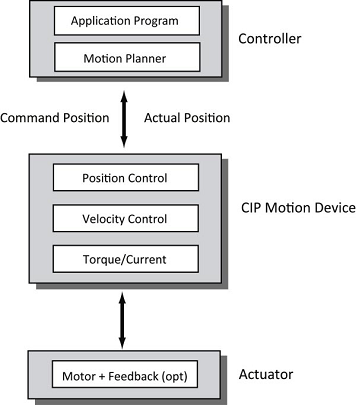
此类配置中需要反馈设备,用以实现精确定位。该反馈设备也可用来通过循环数据连接向控制器返回实际速度和实际加速度。
除了给定位置外,控制器还可传递给定速度和给定加速度,来实现前馈控制。
轴测试模式
“测试模式启用”属性设置为“已启用”且配置用于“控制器回送”的轴将在位置环控制模式下模拟驱动器。
提供反馈