运动归零配置属性
归零功能用于确定相关轴的机器参考位置或零点位置。归零配置属性需要相关联的位置反馈设备。归零不能用于配置为以无编码器或无传感器模式运行的驱动器。
下表描述了运动控制轴的运动归零配置属性。
归零模式
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
必需 - E | 设置/SSV | USINT | 1 | - | - | 枚举值 0 = 被动 1 = 主动 (PVTC) 2-55 = 保留 |
“归零模式”属性用于确定是否发生以下操作:
- 归零主动移动轴以生成自动归零事件
- 外部机构通过移动轴生成归零事件
运动轴支持主动和被动归零模式。对于物理伺服轴,主动归零是最常用的归零过程,但不适用于“轴配置”为“仅反馈”的情况,因为此时需要主动控制轴。“归零序列”属性介绍主动和被动归零模式下的可用归零序列。
归零模式 | 说明 |
|---|---|
Active | 如果将归零模式选为主动归零,则会通过指定归零限位开关、指定转矩水平和/或编码器标记是否用于该轴来选择所需归零序列。主动归零序列始终使用梯形速度曲线,其动力学参数由归零速度、归零返回速度、归零加速度和归零减速度定义。 |
被动 | 被动归零重新定义了发生归零开关、编码器标记或归零到转矩事件时轴的当前绝对位置。被动归零常用来校准不受控的轴,尽管它也可以与受控轴配合使用以创建自定义归零序列。 对于给定归零序列,被动归零的工作方式类似于相应的主动归零序列,不同之处是,不发出运动命令;控制器仅等待开关、标记、扭矩事件发生。 |
归零方向
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
必需 - E 仅限 PV | 设置/SSV | USINT | 1 | - | - | 枚举值 0 = 单向正向 1 = 双向正向 2 = 单向反向 3 = 双向反向 4-255 = 保留 |
“归零方向”属性表示配置为主动归零模式时归零序列的起始方向。
此属性仅适用于位置和速度控制。
归零序列
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
必需 - E | 设置/SSV | USINT | 0 | - | - | 枚举值 0 = 立即(默认值) 1 = 归零到开关 (O) 2 = 归零到标记 (O) 3 = 先归零到开关然后到标记 (O) 4 = 归零到转矩 (O) 5 = 先归零到转矩然后到标记 (O) 6 = 立即绝对 (O) 7-255 = 保留 |
确定用于触发所需归零事件的运动序列。根据可用硬件支持和反馈接口硬件对可选枚举值进行过滤。如果为轴配置的反馈类型不支持标记信号,则不能使用以下归零序列:
- 2 = 归零到标记 (O)
- 3 = 先归零到开关然后到标记 (O)
- 5 = 先归零到转矩然后到标记 (O)
可能需要根据可用硬件支持和反馈接口硬件对可选枚举值进行过滤。
归零序列说明
归零序列类型 | 说明 |
|---|---|
主动归零 | 主动归零序列使用梯形点动速度曲线使轴在等待归零事件发生时移动。
小贴士:
立即归零序列类型不使用梯形点动速度曲线。
选择“主动”归零模式时,“归零序列”属性将归零限位开关、归零扭矩水平或反馈设备标记用于归零事件。“归零方向”属性使用归零序列确定点动曲线的方向行为。单向和双向确定点动是否在检测到归零事件后反向运动。“正向”和“反向”是指归零过程中初始点动的方向。 |
主动立即归零 | 这是最简单的主动归零序列类型。轴实际位置和给定位置根据配置的零点位置进行更新。 |
主动立即绝对归零 | 在此序列中,控制器启用驱动器,并将实际位置和给定位置重新定义为绝对反馈设备的当前位置。“归零偏移”属性适用。如果为非零值,则“归零偏移”应用于当前给定位置和实际位置: 当前位置 = 绝对反馈位置 - 归零偏移。 |
主动双向归零到开关 | 当编码器标记不可用时,此主动归零序列非常有用。当此序列执行时,轴将按指定的归零速度和归零加速度沿指定的归零方向运动,直至检测到归零限位开关。随后,轴会以指定的归零减速度减速停止,然后按指定的归零返回速度和归零加速度沿反方向运动,直至清除归零限位开关。 清除归零限位开关后,轴位置会立即重新定义为等于零点位置,并且轴会沿指定归零方向减速停止。 如果归零偏移非零,则零点位置将与清除归零开关时的位置偏移该值。轴以指定的归零减速度减速停止后,控制器会使用梯形运动曲线以归零返回速度和归零加速度将轴移回到零点位置。 如果轴配置为循环行程模式,则将以最短路径(例如不超过 ½ 转)将轴移回到零点位置。针对此主动归零序列的轴行为在下图中加以说明: 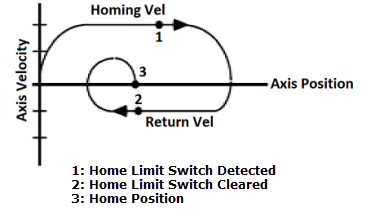 如果控制器检测到归零开关在归零序列开始时处于活动状态,则控制器立即反转归零方向并开始归零序列的返回段。 不考虑归零限位开关的机械不可靠性,此归零序列的准确性取决于检测归零限位开关转换时的时间不确定性。零点位置的位置不确定性等于控制装置用于检测归零限位开关的最大时间(约 10 毫秒)与指定的归零返回速度的乘积。因此,归零返回速度通常比归零速度慢得多。 例如,如果指定归零返回速度为每秒 0.1 英寸 (6 IPM),则按如下方式计算零点位置的不确定性: 不确定性 = 0.1 英寸/秒 * 0.01 秒 = 0.001 英寸。 |
主动双向归零到标记 | 这种主动归零序列对于单转旋转式和线性编码器应用来说很有用,因为这些应用仅将一个编码器标记用于整个轴行程。当此序列执行时,轴将按指定的归零速度和归零加速度沿指定的归零方向运动,直至检测到标记。随后会将零点位置分配给对应于标记位置的轴位置,并且轴会以指定的归零减速度减速停止。 如果归零偏移非零,则零点位置将与检测到标记时的位置偏移该值。随后,控制器会使用梯形运动曲线以归零返回速度和归零加速度使轴回到零点位置。如果轴配置为循环行程模式,则将以最短路径(例如不超过 ½ 转)将轴移回到零点位置。针对此归零序列的轴行为在下图中加以说明: 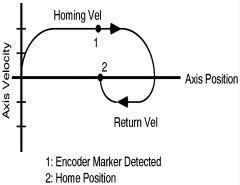 此归零序列的准确度仅取决于检测标记转换时的时间延时。零点位置的位置不确定性等于控制装置用于检测标记脉冲的最大延时(约 1 微秒)与指定的归零速度的乘积。 例如,如果指定归零速度为每秒 1 英寸 (60 IPM),则按如下方式计算零点位置的不确定性: 不确定性 = 1 英寸/秒 * 0.000001 秒 = 0.000001 英寸。 |
主动双向归零到开关然后到标记 | 这是可用的最准确主动归零序列。当此序列执行时,轴将按指定的归零速度和归零加速度沿指定的归零方向运动,直至检测到归零限位开关。随后,轴会以指定的归零减速度减速停止,然后按指定的归零返回速度和归零加速度沿反方向运动,直至清除归零限位开关。清除归零限位开关后,轴继续以归零返回速度沿同一方向运动,直到检测到第一个编码器标记。 检测到该标记时,会将零点位置分配给轴位置,然后轴会以指定的归零减速度减速停止。如果归零偏移非零,则零点位置将与检测到标记时的位置偏移该值。随后,控制器会使用梯形运动曲线以归零返回速度和归零加速度使轴回到零点位置。 如果轴配置为循环行程模式,则将以最短路径(例如不超过 ½ 转)将轴移回到零点位置。针对此主动归零序列的轴行为在下图中加以说明: 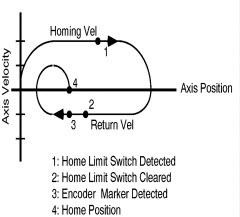 如果控制器检测到归零开关在归零序列开始时处于活动状态,则控制器立即反转归零方向并开始归零序列的返回段。 |
主动单向归零到开关 | 当物理轴无法改变方向时,通常会使用单向归零。 当编码器标记不可用并且需要进行单向运动或者正在使用接近开关时,此主动归零序列十分有用。 当在主动归零模式下执行此序列时,轴将按指定的归零速度和归零加速度沿指定的归零方向运动,直至检测到归零开关。如果归零偏移为零,检测到限位开关时,会将零点位置分配给轴位置,然后轴会以指定的归零减速度减速停止。 如果归零偏移非零,则零点位置将与检测到开关时的位置偏移该值。随后,控制器会使用梯形运动曲线以归零速度和归零加速度继续使轴运动到零点位置。 通过将归零偏移设置为大于减速距离的值,可确保单向运动到零点位置。但是,如果归零偏移值小于减速距离,则轴仅会以指定的归零减速度减速停止。轴 不会 反转方向来移到零点位置。在这种情况下,清零 IP 位时,不会将相关 MAH 指令的 PC 位置位。如果针对循环轴执行此归零序列,并且归零偏移值小于减速距离(检测到归零事件时),控制装置会自动向运动距离添加一转或几转。这将保证单向运动到零点位置。 |
主动单向归零到标记 | 对于单转旋转式和线性编码器应用来说,当要求进行单向运动时,此主动归零序列将非常有用。 当在主动归零模式下执行此序列时,轴将按指定的归零速度和归零加速度沿指定的归零方向运动,直至检测到标记。如果归零偏移为零,检测到标记时,会将零点位置分配给轴位置,然后轴会以指定的归零减速度减速停止。 如果归零偏移非零,则零点位置将与检测到标记时的位置偏移该值。随后,控制器会使用梯形运动曲线以归零速度和归零加速度继续使轴运动到零点位置。 轴位置会根据零点位置和归零偏移进行更新。即使归零偏移为零,位置也会更新。零为有效数。 通过将归零偏移设置为大于减速距离的值,可确保单向运动到零点位置。但是,如果归零偏移值小于减速距离,则轴仅会以指定的归零减速度减速停止。轴 不会 反转方向来移到零点位置。在这种情况下,清零 IP 位时,不会将相关 MAH 指令的 PC 位置位。如果针对循环轴执行此归零序列,并且归零偏移值小于减速距离(检测到归零事件时),控制装置会自动向运动距离添加一转或几转。这将保证单向运动到零点位置。 |
主动单向归零到开关然后到标记 | 对于多转旋转式应用来说,当要求进行单向运动时,此主动归零序列将非常有用。 当在主动归零模式下执行此序列时,轴将按指定的归零速度和归零加速度沿指定的归零方向运动,直至检测到归零开关。轴继续以归零速度沿同一方向运动,直到检测到第一个标记事件。如果归零偏移为零,则会在检测到标记的精确位置,将零点位置分配给轴位置,然后轴会以指定的归零减速度减速停止。轴位置会根据零点位置和归零偏移进行更新。 如果归零偏移非零,则零点位置将与检测到标记时的位置偏移该值。随后,控制器会使用梯形运动曲线以归零速度和归零加速度继续使轴运动到零点位置。 通过将归零偏移设置为大于减速距离的值,可确保单向运动到零点位置。但是,如果归零偏移值小于减速距离,则轴仅会以指定的归零减速度减速停止。轴 不会 反转方向来移到零点位置。在这种情况下,清零 IP 位时,不会将相关 MAH 指令的 PC 位置位。如果针对循环轴执行此归零序列,并且归零偏移值小于减速距离(检测到归零事件时),控制装置会自动向运动距离添加一转或几转。这将保证单向运动到零点位置。 如果控制器检测到归零开关在归零序列开始时处于活动状态,控制器会立即根据当前轴位置建立零点位置,如果单向运动限制允许,控制器会开始运动到零点位置。 |
主动归零到转矩然后到标记 | 与归零到转矩序列类似,先归零到转矩然后到标记序列适用于将硬挡块用作零点位置(常用于线性致动器)且反馈设备配有编码器标记信号的情况。向电机施加的给定转矩达到或超过用户指定的转矩水平时,会检测到出现硬挡块。归零到转矩序列取决于操作行程的机械停止,不能进行单向归零,因此只允许进行双向正向和双向反向归零。在驱动器中实施延时滤波器,以减少启用或点动电机(欠载)时转矩反馈中出现尖峰的情况下,可能造成的虚假/无用触发。 将编码器标记包含在归零序列中,这是可用于基于转矩水平的归零的最精确归零操作。执行此序列时,轴将按指定的归零速度和归零加速度沿指定归零方向运动,直至检测到硬挡块,例如电机转矩超出归零转矩阈值的时间达到归零转矩时间。轴随后会反转方向,先以归零减速度减速,然后使用归零加速度沿远离硬挡块的方向运动以达到归零返回速度,直至检测到第一个编码器标记。检测到标记后,会计算零点位置。轴随后会以指定的归零减速度减速停止,控制器会将覆盖的驱动器属性恢复为其保存的原始值。如果计算得出的零点位置未超过硬挡块,则轴会使用梯形运动曲线以归零返回速度以及归零加速度和归零减速度运动到零点位置。针对此归零序列的轴行为在下图中加以说明: 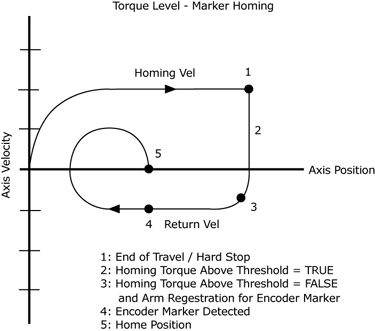 |
被动立即归零 | 这是最简单的被动归零序列类型。执行此序列时,控制器立即将零点位置分配给当前轴实际位置。此归零序列不会导致轴运动。 |
被动立即绝对归零 | 在此序列中,驱动器将实际位置和给定位置重新定义为绝对反馈设备的当前位置。如果为非零值,则“归零偏移”应用于当前给定位置和实际位置: 当前位置 = 绝对反馈位置 - 归零偏移。
小贴士:
在被动立即绝对序列期间,不执行“伺服系统打开”。
|
使用开关的被动归零 | 当编码器标记不可用或者使用接近开关时,此被动归零序列十分有用。 当在被动归零模式下执行此序列时,外部机构将使轴运动,直至检测到归零开关。当检测到限位开关时,会将零点位置分配给轴位置。如果归零偏移非零,则零点位置将与检测到开关时的位置偏移该值。 |
使用标记的被动归零 | 对于单转旋转式和线性编码器应用来说,此被动归零序列将非常有用。 当在被动归零模式下执行此序列时,外部机构将使轴运动,直至检测到标记。在检测到标记的精确位置,将零点位置分配给轴位置。如果归零偏移非零,则零点位置将与检测到开关时的位置偏移该值。 |
先使用开关后使用标记的被动归零 | 对于多转旋转式应用来说,此被动归零序列将非常有用。 当在被动归零模式下执行此序列时,外部机构将使轴运动,直至先检测到归零开关然后检测到第一个编码器标记。在检测到标记的精确位置,将零点位置分配给轴位置。如果归零偏移非零,则零点位置将与检测到开关时的位置偏移该值。 |
归零配置位
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
必需 - E | 设置/SSV | DWORD | 0x00 | - | - | 位映射 0 = 保留 1 = 归零开关常闭 2-31 = 保留 |
“归零配置位”属性决定与归零相关的行为,如归零开关触点的检测。
“归零开关常闭”位属性决定归零序列使用的归零限位开关的正常状态。开关的正常状态是指其在归零序列期间由轴进行啮合之前的状态。例如,如果“归零开关常闭”位置位(真),则归零前开关的状态为闭合。开关在归零序列期间由轴进行啮合时,开关断开,从而构成归零事件。
零点位置
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
必需 - E | 设置/SSV | REAL | 0 | -maxpos | maxpos | 位置单位 |
如果行程模式为循环:0 <= 零点位置 < 归位
零点位置表示完成指定的归零序列后所需的轴绝对位置。主动归零序列完成后,轴停留在指定的零点位置。
- 如果是双向归零,则轴停留在零点位置。
- 如果是单向归零,且“行程模式”=“循环”,则轴停留在零点位置。
否则,轴不处于零点位置,轴位置基于零点位置。
大多数情况下,零点位置设为零,但也可以使用介于轴的最大负向行程限制和最大正向行程限制(若启用)之间的任意值。(有关“最大正向行程”和“最大负向行程”配置属性的说明,请参见“伺服和驱动器轴对象”规范。)对于循环轴,零点位置限制为小于“位置归位”值除以“转换常数”所得值的正数。
归零偏移
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
必需 - E | 设置/SSV | REAL | 0 | -maxpos | maxpos | 位置单位 |
应用于主动或被动归零模式时,且采用非立即归零序列时,归零偏移是指轴零点位置与发生归零事件时的位置之间的所需位置偏移。在轴运动到零点位置之前,在指定归零序列结束时应用归零偏移。大多数情况下,归零偏移设为零。
主动双向归零序列完成后,轴停留在指定的零点位置。如果归零偏移非零,则轴将与标记或归零开关事件点偏移归零偏移值。如果归零偏移为零,则轴刚好停留在标记或归零开关点上方。
这对于立即归零序列无效。
归零速度
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
必需 - E 仅限 PV | 设置/SSV | REAL | 0 | 0 | maxspd | 位置单位/秒 |
“归零速度”属性控制主动归零序列第一段中使用的点动曲线的速度,如上面的“归零序列类型”属性中所述。
这对于立即或立即绝对归零序列无效。
归零返回速度
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
必需 - E 仅限 PV | 设置/SSV | REAL | 0 | 0 | maxspd | 位置单位/秒 |
“归零返回速度”属性控制主动双向归零序列第一段之后使用的点动曲线的速度,如上面的“归零序列类型”属性中所述。
这对于立即或立即绝对归零序列无效。
归零加速度
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
可选 - E 仅限 PV | 设置/SSV | REAL | 0 | 0 | maxacc | 位置单位/秒 2 |
“归零加速度”属性控制“主动归零序列”属性中使用的速度曲线的加速度。
这对于立即或立即绝对归零序列无效。
归零减速度
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
可选 - E 仅限 PV | 设置/ SSV | REAL | 0 | 0 | maxacc | 位置单位/秒 2 |
“归零减速度”属性控制轴在主动归零序列中停止时的减速度,如“归零序列”属性中所述。
这对于立即或立即绝对归零序列无效。
归零转矩限制
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
可选 - E 仅限 PV | 设置/ SSV | REAL | 0 | 0 | 100 | 位置单位/秒 2 |
“归零扭矩限制”属性是主动“归零到扭矩”序列期间,控制器在驱动器中暂时应用于“正扭矩限制”和“负扭矩限制”的值。
这仅适用于“归零到扭矩”序列,或“归零到扭矩,然后标记归零”序列。
归零转矩阈值
用途 | 访问 | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|
可选 - E 仅限 PV | 设置/ SSV | REAL | 0 | 0 | 100 | 位置单位/秒 2 |
“归零扭矩阈值”属性用于设置在归零到扭矩序列期间检测硬挡块所需的最小扭矩水平。在指定的归零扭矩时间内,驱动器的输出扭矩必须超出指定的归零扭矩阈值。归零扭矩阈值的单位以有效扭矩限制的百分比表示,在归零序列期间,由控制器设置为归零扭矩限制。
这仅适用于“归零到扭矩”序列,或“归零到扭矩,然后标记归零”序列。
提供反馈