运动控制状态属性
下面是与运动控制轴相关的运动控制状态属性。“轴事件位”位于事件捕获属性中。
运动状态位
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/ GSV 1 | T | DWORD | - | - | - | 位映射 0 = AccelStatus 1 = DecelStatus 2 = MoveStatus 3 = JogStatus 4 = GearingStatus 5 = HomingStatus 6 = StoppingStatus 7 = AxisHomedStatus 8 = PositionCamStatus 9 = TimeCamStatus 10 = PositionCamPendingStatus 11 = TimeCamPendingStatus 12 = GearingLockStatus 13 = PositionCamLockStatus 14 = TimeCamLockStatus 15 = MasterOffsetMoveStatus 16 = CoordinatedMotionStatus 17 = TransformStateStatus 18 = ControlledByTransformStatus 19 = DirectVelocityControlStatus 20 = DirectTorqueControlStatus 21 = 保留 22 = MoveLockStatus 23 = 保留 24 = JogLockStatus 25 = MasterOffsetMovePendingStatus 26 = MasterOffsetMoveLockStatus 27 = MaximumSpeedExceeded 28...31 = 保留 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
这是一个与运动轨迹规划器功能相关的状态条件位映射集合。
运动轴内部状态位说明
下表说明了各个运动轴内部状态位:
位 | 运动状态 | 说明 |
|---|---|---|
0 | 加速状态 | 加速和减速状态位属性(“加速状态”和“减速状态”)可用于确定轴当前是否处于加速或减速状态。如果两个位均未置位,说明该轴正以恒定速度运行或处于静止状态。 |
1 | 减速状态 | |
2 | 运动状态 | 当执行“运动”运动曲线时,“运动状态”位属性置位。只要运动完成或被其他运动操作取代,“运动状态”位将立即清零。 |
3 | 点动状态 | 当执行“点动”运动曲线时,“点动状态”位属性置位。只要点动完成或被其他运动操作取代,“点动状态”位将立即清零。 |
4 | 传动状态 | 如果轴当前正通过齿轮传动到另一个轴,则传动状态位属性置位。只要传动完成或被其他运动操作取代,“传动状态”位将立即清零。 |
5 | 归零状态 | 当执行“归零”运动曲线时,“归零状态”位属性置位。只要归零完成或被其他运动操作取代,“归零状态”位将立即清零。 |
6 | 正在停止状态 | 当执行停止过程时,“正在停止状态”位属性置位。只要停止过程完成,“正在停止状态”位将立即清零。 停止过程用于使轴停止(由 MAS、MGS、MGSP、停止规划器故障动作或模式变更引起)。该位不再与传动离合器位相关(在 MAG 指令中选择 Clutch),该位在 I4B 中已明确命名为“传动锁定状态”位。 |
7 | 已归零状态 | 上电或重新连接时,“已归零状态”位属性清零。成功完成配置的归零序列后,MAH 指令将该位设为 1。之后当轴进入关闭状态时,该位清零。 成功完成配置的归零序列后,MAH 指令将 HomedStatus 位置位。该位表示已建立绝对机器参考位置。该位置位时,可以有效地使能需要机器参考位置的操作(例如:软件超程检查)。 以下条件下,HomedStatus 位清零:
控制系统直接使用 HomedStatus 位来确定软件超程检查功能是否达到运行条件。因此,如果 HomedStatus 位清零,即使“软件超程检查”位置位,也不会执行软件超程检查。 |
8 | 位置凸轮状态 | 当执行“位置凸轮”运动曲线时,“位置凸轮状态”位属性置位。只要位置凸轮运动完成或被其他运动操作取代,“位置凸轮状态”位将立即清零。 |
9 | 时间凸轮状态 | 当执行“时间凸轮”运动曲线时,“时间凸轮状态”位属性置位。只要时间凸轮运动完成或被其他运动操作取代,“时间凸轮状态”位将立即清零。 |
10 | 位置凸轮待处理状态 | 如果一个“位置凸轮”运动曲线正在等待当前执行的凸轮运动曲线完成,则“位置凸轮待处理状态”位置位。如果执行 MAPC 指令并且选择“待处理”执行计划,将引发该状态。 只要当前位置凸轮曲线完成,引起待处理凸轮曲线启动,“位置凸轮待处理状态”位将立即清零。如果位置凸轮曲线完成或被其他运动操作取代,该位也将清零。 |
11 | 时间凸轮待处理状态 | 如果一个“时间凸轮”运动曲线正在等待当前执行的凸轮运动曲线完成,则“时间凸轮待处理状态”位置位。如果执行 MATC 指令并且选择“待处理”执行计划,将引发该状态。 只要当前时间凸轮曲线完成,引起待处理凸轮曲线启动,“时间凸轮待处理状态”位将立即清零。如果时间凸轮曲线完成或被其他运动操作取代,该位也将清零。 |
12 | 传动锁定状态 | 当从轴依照指定传动比以特定传动关系锁定到主轴时,“传动锁定状态”位属性置位。 传动规划器的离合器功能用于使轴的速度逐渐上升或下降至传动速度(在 MAG 指令中选择 Clutch)。在轴进行离合的时间内,“传动锁定状态”位清零。 |
13 | 位置凸轮锁定状态 | 当主轴满足当前活动位置凸轮运动曲线的启动条件时,“位置凸轮锁定状态”位属性置位。启动条件由 MAPC 指令的启动控制和启动位置参数决定。 只要当前位置凸轮曲线完成或被其他运动操作取代,“位置凸轮锁定”位将立即清零。在单向主轴方向模式中,“位置凸轮锁定状态”位在沿错误方向运动时清零,沿正确方向运动时则置位。 |
15 | 主轴偏移运动状态 | 当执行“主轴偏移运动”运动曲线时,“主轴偏移运动状态”位属性置位。 只要“主轴偏移运动”完成或被其他运动操作取代,“主轴偏移运动状态”位将立即清零。 |
16 | 协调运动状态 | 当该轴正在执行任何协调运动曲线时,“协调运动状态”位属性置位。 只要协调运动完成或停止,“协调运动状态”位将立即清零。 |
17 | 变换状态 | 如果该轴参与变换,则“变换状态”位置位。该轴位于活动 MCT 指令中所指定的其中一个坐标系统之内。该值为真,表示该轴参与变换,为假则表示不参与变换。 |
18 | 由变换控制状态 | 如果轴处于变换控制之下,则“由变换控制状态”位置位。该值为真,表示该轴处于变换控制之下,为假则表示不处于变换控制之下。无法通过指令使处于变换控制之下的轴进行运动。 |
19 | 直接速度控制状态 | 当直接速度控制状态位置位时,轴速度由直接给定速度值直接控制。 该位由运动驱动启动 (MDS) 指令置位,且仅适用于 CIP 驱动器轴类型。 |
20 | 直接转矩控制状态 | 当直接转矩控制状态位置位时,轴转矩由给定转矩值直接控制。 该位由运动驱动启动 (MDS) 指令置位,且仅适用于 CIP 驱动器轴类型。 |
22 | 运动锁定状态 | 当主轴满足运动轴运动 (MAM) 指令的锁定方向请求时,运动锁定状态位置位。如果锁定方向为“仅立即正向”或“仅立即反向”,则运动锁定状态位将在 MAM 启动时立即置位。如果锁定方向为“仅位置正向”或“仅位置反向”时,则该位将在主轴沿指定方向经过主轴锁定位置时置位。 当主轴反向且从轴停止跟随主轴时,运动锁定状态位清零。当从轴恢复跟随主轴时,运动锁定状态位再次置位。 |
24 | 点动锁定状态 | 当主轴满足运动轴点动 (MAJ) 指令的锁定方向请求时,点动锁定状态位置位。如果锁定方向为“仅立即正向”或“仅立即反向”,则 JogLockStatus 位将在 MAJ 启动时立即置位。如果锁定方向为“仅位置正向”或“仅位置反向”时,则该位将在主轴沿指定方向经过主轴锁定位置时置位。 当主轴反向且从轴停止跟随主轴时,点动锁定状态位清零。当从轴恢复跟随主轴时,点动锁定状态位再次置位。 |
25 | 主轴偏移运动待处理状态 | 在 MDSC 模式下,主轴偏移运动锁定到主轴。 |
26 | 主轴偏移运动锁定状态 | 当主轴满足使用 MAM 指令执行的主轴偏移运动的锁定方向请求时,主轴偏移运动锁定状态位置位。如果锁定方向为“仅立即正向”或“仅立即反向”,则主轴偏移运动锁定状态位将在 MAM 启动时立即置位。如果锁定方向为“仅位置正向”或“仅位置反向”时,则该位将在主轴沿指定方向经过主轴锁定位置时置位。 当主轴反向且从轴停止跟随主轴时,主轴偏移运动锁定状态位清零。当从轴恢复跟随主轴时,主轴偏移运动锁定状态位再次置位。 |
27 | 超出最大速度 | 当轴给定速度始终超出为轴配置的最大速度时,超出最大速度位置位。当轴速度降至低于最大速度时,该位将清零。 |
轴状态位
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/ GSV 1 | T | DWORD | - | - | - | 0 = ServoActionStatus 1 = DriveEnableStatus 2 = AxisShutdownStatus 3 = ConfigurationUpdateInProcess 4 = InhibitStatus 5 = DirectControlStatus 6 = AxisUpdateStatus 7...31 = 保留 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
“轴内部状态位”属性由一组与轴相关的基本状态条件组成。这些位表示在执行运动控制指令时系统所用的关键状态条件。
下表说明了各个轴内部状态位:
位 | 轴内部状态 | 说明 |
0 | 伺服动作状态 | 当相关轴电机控制功能跟踪来自控制器的给定参考值时,ServoActionStatus 位属性置位。 |
1 | 驱动器使能状态 | 当与轴相关联的功率组件当前处于启用状态时,DriveEnableStatus 位属性置位。如果此位未置位,表明与轴相关联的功率组件当前处于禁用状态。 |
2 | 轴关闭状态 | 当相关轴当前处于关闭状态时,“轴关闭状态”位属性置位。该轴由关闭状态转换为其他状态后,关闭状态位会立即清零。 |
3 | 正在更新配置 | “正在更新配置状态”位属性提供一种方法,可监视由设置属性列表服务或用户程序中的 SSV 启动的一个或多个特定模块配置属性更新的进度。此类更新过程启动后,Logix 处理器会立即将 ConfigurationUpdateInProcess 位置位。 该位将保持置位,直到伺服模块返回“设置属性列表”应答,指示数据更新过程已成功执行。因此,“正在更新配置状态位”属性提供一种等待机制,使系统在所连接运动控制模块的伺服配置数据更新完成后,才启动相关联的操作。 |
4 | 禁止状态 | 可以使用属性 #20“禁用轴”以编程方式禁用或取消禁用轴。当轴处于禁用状态时,“禁用状态”位属性置位。该位也可用于确定禁用/取消禁用操作何时已完成(即连接已关闭、重新连接,然后重新配置过程完成)。在禁用/取消禁用的过程中,该位将保持之前的状态,然后,在此过程完成后,该位会立即更新为新状态。此禁用状态与“启动禁止”无关。 |
5 | 直接控制状态 | 当直接控制状态位置位时,轴运动由直接速度控制和直接转矩控制功能驱动。在此模式下,将禁用运动轨迹规划器功能。因此,如果尝试通过运动轨迹规划器指令(例如 MAM、MAJ 和 MAG)使轴运动,会出现运行指令错误。 在直接控制模式下,无需建立或保持绝对参考位置。因此,尝试执行 MAH 和 MRP 指令时,会出现指令错误。 当直接控制状态位清零时,轴运动由运动轨迹规划器控制。如果尝试在此模式下通过直接控制指令(例如,MDS)使轴运动,会出现指令错误。该位仅适用于 CIP 驱动器轴类型。 此图说明了后续行为。 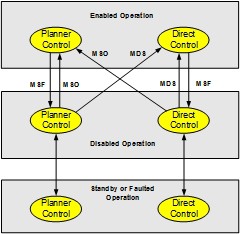 直接控制状态位由运动驱动启动 (MDS) 指令置位,而且置位后,只能通过在“已停止”或“正在停止”状态下执行 MSO 指令来清零。同样,直接控制状态位由运动伺服开启 (MSO) 指令清零后,只能通过在“已停止”或“正在停止”状态下执行 MDS 指令再次置位。 |
6 | 轴更新状态 | 轴更新位指示该轴实例是否已在上次执行运动任务时更新。通常,轴示例会根据其轴更新规划在运动任务中进行更新。因此,在执行运动任务期间,可能会也可能不会更新给定轴实例。在由运动组或运动任务执行触发的事件任务中检查轴更新位时,可根据该轴是否被前一运动任务更新来限定程序指令的执行。 |
轴故障位
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
必需 - 所有 | 获取/GSV 1 | T | DWORD | - | - | - | 位映射 0 = 物理轴故障 1 = 模块故障 2 = 配置故障 3 = 组故障 4 = 运动故障 5 = 保护故障 6 = 初始化故障 7 = APR 故障 8 = 安全故障 9...31 = 保留 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
“轴故障位属性”由一组与轴相关的基本故障类型组成。对于每个有效的轴故障类型,都为其分配了此字中的一个位。任何与给定故障类型相关的故障条件都将导致相应的故障位置位。
“轴故障位”属性中的每个位都表示一组相关的故障类型。给定故障类型的一个或多个故障都会导致“轴故障位”属性的相关位置位。
下表说明了各个轴故障位:
位 | 名称 | 说明 |
|---|---|---|
0 | 物理轴故障 | 如果物理轴故障位置位,表明物理轴已报告一个或多个故障条件。随后,通过访问相关物理轴的轴数据类型特定的故障属性,可确定具体的故障条件。 对于 CIP 驱动器轴数据类型,物理轴故障映射至标准“CIP 轴故障”属性或制造商特定的 CIP 轴故障。 |
1 | 模块故障 | 当出现一个或多个故障,且与所选轴相关的运动控制模块有关时,“模块故障位”属性置位。随后,通过访问相关轴的“模块故障”属性,可确定具体的故障条件。通常,模块故障会影响与运动控制模块相关的所有轴。模块故障通常会导致所有相关轴关闭。要从模块故障状况恢复,需要重新配置运动控制模块。 |
2 | 配置故障 | 未成功更新相关运动控制模块的轴配置属性时,配置故障位置位。有关配置故障的具体信息,请参见与运动控制模块相关的“属性错误代码”和“属性错误 ID”属性。 |
3 | 组故障 | 当出现一个或多个故障,且与所选轴相关的运动组有关时,“组故障”位属性置位。随后,通过访问相关运动组的“组故障”属性,可确定具体的故障条件。通常,组故障会影响与运动组相关的所有轴。组故障通常会导致所有相关轴关闭。要从组故障状况恢复,需要重新配置整个运动子系统。 |
4 | 运动故障 | 如果运动故障位置位,表明已出现一个或多个与运动轨迹规划器功能相关的故障条件。随后,通过访问相关轴的“运动故障”属性,可确定具体的故障条件。 |
5 | 保护故障 | 如果“保护故障”位置位,表明已出现一个或多个与嵌入式保护运动安全功能相关的故障条件。随后,通过访问相关轴的“保护故障”属性,可确定具体的故障条件。仅当驱动器设备配有“硬接线”保护安全功能时,“保护故障”才适用。 |
6 | 初始化故障 | 当 CIP Motion 设备不论任何原因而未能成功初始化时,“初始化故障”位置位。有关初始化故障的具体信息,请参见与 CIP 驱动器轴数据类型相关的标准“CIP 初始化”属性或制造商特定的“CIP 初始化故障”属性。 |
7 | APR Fault | 若在轴配置期间,系统无法恢复轴的绝对位置时,则 APR(绝对位置恢复)故障位置位。有关 APR 故障的具体信息,请参见与 CIP 驱动器轴数据类型相关的标准“APR 故障”属性或制造商特定的“APR 故障”属性。 |
8 | 安全故障 | 如果安全故障位置位,表明已出现一个或多个与轴安全功能相关的故障条件。随后,通过访问相关轴的“轴安全故障”属性,可确定具体的故障条件。仅当运动控制设备支持通过“CIP Safety”连接实现的“联网”安全功能时,“安全故障”才适用。 |
轴测试模式
“测试模式”属性设置为“已启用”且配置用于“控制器回送”的轴将模拟这些 CIP 轴故障位。
位 | 名称 | 说明 | 轴测试模式支持 (测试模式配置) |
|---|---|---|---|
3 | 组故障 | 只有以下故障才能设置组故障位:
| |
4 | 运动故障 | 运动规划器生成的所有故障都会导致此位置位。 | |
8 | 安全故障 | 仅运动安全功能 对故障进行模拟。 | 控制器回送:v36 |
轴事件位
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/GSV 1 | T | DWORD | - | - | - | 位映射 - 轴故障 0 = WatchEventArmedStatus 1 = WatchEventStatus 2 = RegEvent1ArmedStatus 3 = 记录事件 1 状态 4 = 记录事件 2 已装备状态 5 = RegEvent2Status 6 = HomeEventArmedStatus 7 = HomeEventStatus 8...31= 保留 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
轴事件位属性由一组基本事件条件组成。该属性主要由系统在执行各种运动事件指令期间使用。
轴事件位说明
位 | 名称 | 说明 |
|---|---|---|
0 | 监视事件已装备状态 | 当已通过执行 MAW(运动装备监视)指令装备监视事件时,“监视事件已装备状态”位属性置位。当发生监视事件或执行 MDW(运动解除监视)指令时,该位清零。 |
1 | 监视事件状态 | 当发生监视事件时,“监视事件状态”位属性置位。当执行另一条 MAW(运动装备监视)指令或 MDW(运动解除监视)指令时,该位清零。 |
2 | 记录 1 事件已装备状态 | 当已通过执行 MAR(运动装备记录)指令为记录输入 1 装备记录检查时,“记录 1 事件已装备状态”位属性置位。在记录输入 1 发生记录事件或执行 MDR(运动解除记录)指令后,该位清零。 |
3 | 记录 1 事件状态 | 当记录输入 1 发生记录事件时,“记录 1 事件状态”位属性置位。当针对记录输入 1 执行另一条 MAR(运动装备记录)指令或 MDR(运动解除记录)指令时,该位清零。 |
4 | 记录 2 事件已装备状态 | 当已通过执行 MAR(运动装备记录)指令为记录输入 2 装备记录检查时,“记录 2 事件已装备状态”位属性置位。在记录输入 2 发生记录事件或执行 MDR(运动解除记录)指令后,该位清零。 |
5 | 记录 2 事件状态 | 当记录输入 2 发生记录事件时,“记录 2 事件状态”位属性置位。当针对记录输入 2 执行另一条 MAR(运动装备记录)指令或 MDR(运动解除记录)指令时,该位清零。 |
6 | 归零事件已装备状态 | 当归零事件已装备,并由 MAH(运动轴归零)指令用于管理在配置的归零序列期间发生的各种归零事件时,“归零事件已装备状态”位属性置位。当发生归零事件时,该位清零。 |
7 | 归零事件状态 | 当发生归零事件,并由 MAH(运动轴归零)指令用于管理在配置的归零序列期间发生的各种归零事件时,“归零事件状态”位属性置位。当执行另一个 MAH 指令时,该位清零。 |
输出凸轮状态
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 获取/ GSV 1 | T | DWORD | - | - | - | 输出凸轮状态位集。 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
当输出凸轮启动时,“输出凸轮状态”位置位。当凸轮位置在无输出凸轮等待处理的“一次性”执行模式下移出凸轮起始位置或终点位置时,或者当输出凸轮由“运动解除输出凸轮”(MDOC) 指令终止时,“输出凸轮状态”位复位。
输出凸轮待处理状态
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 获取/ GSV 1 | T | DWORD | - | - | - | 输出凸轮待处理状态位集。 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
当一个输出凸轮正在等待另一个输出凸轮完成时,“输出凸轮待处理状态”位置位。如果执行“运动装备输出凸轮”(MAOC) 指令并且选择“待处理”执行计划,将引发该状态。一旦当前执行的输出凸轮完成并触发该输出凸轮的装备过程,“输出凸轮待处理状态”位即清零。当输出凸轮由“运动解除输出凸轮”(MDOC) 指令终止时,该位也会清零。
输出凸轮锁定状态
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 获取/ GSV 1 | T | DWORD | - | - | - | 输出凸轮锁定状态位集。 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
输出凸轮装备完毕后,“输出凸轮锁定状态”位置位。当执行“运动装备输出凸轮”(MAOC) 指令并且选择“立即”执行计划,或者待处理输出凸轮变为已装备状态,或者轴接近或通过指定轴装备位置时,将引发该状态。一旦该输出凸轮当前位置移出凸轮起始位置或终点位置,“输出凸轮锁定状态”位将立即清零。当输出凸轮由“运动解除输出凸轮”(MDOC) 指令终止时,该位也会清零。
输出凸轮跳变状态
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 获取/ GSV 1 | T | DWORD | - | - | - | 输出凸轮跳变状态位集。 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
从当前装备输出凸轮向待处理输出凸轮跳变期间,“输出凸轮跳变状态”位置位。因此,每个输出凸轮控制一部分输出位。向待处理输出凸轮的跳变完成后,或“运动解除输出凸轮”(MDOC) 指令将输出凸轮终止后,“输出凸轮跳变状态”位复位。
运动报警位和运动故障位
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/ GSV 1 | T | DWORD | - | - | - | 位映射 - 运动报警 0 = 保留 1 = SoftTravelLimitPositiveAlarm 2 = 负向软行程限位超限报警 3...31 = 保留 |
必需 - 所有 | 获取/ GSV 1 | T | DWORD | - | - | - | 位映射 - 运动故障 0 = 保留 1 = 正向软行程限位超限故障 2 = 负向软行程限位超限故障 3...31 = 保留 |
1 支持直接标签访问。所示的位名称可用作 Logix Designer 应用程序中的数据类型成员名称。 | |||||||
运动报警位和运动故障位说明
位 | 名称 | 说明 |
|---|---|---|
0 | 保留 | - |
1 | SoftTravelLimitPositiveAlarm SoftTravelLimitPositiveFault | 在命令轴沿正向运动时,若“软行程检查”已启用且实际位置已超出配置的“软行程限位 - 正向”值时,会出现此异常状况。 如果针对此位的“运动异常动作”设置为“停止规划器”,则故障轴可运动或点动回软行程限位范围内。但是,如果尝试使用运动指令使轴进一步运动从而超出“软行程限位 - 正向”值,则会引发指令错误。 对于受控轴,当轴位置超出“软行程限位 - 正向”值时,可以通过故障复位清除软行程故障,使轴可以运动回软行程限位范围内。只要轴不会在指令控制下进一步沿远离行程限位的方向运动,就不会生成软行程限位故障。 |
2 | SoftTravelLimitNegativeAlarm SoftTravelLimitNegativeFault | 在命令轴沿负向运动时,若“软行程检查”已启用且实际位置已超出配置的“软行程限位 - 负向”值时,会出现此异常状况。 如果针对此位的“运动异常动作”设置为“停止规划器”,则故障轴可运动或点动回软行程限位范围内。但是,如果尝试使用运动指令使轴进一步运动从而超出“软行程限位 - 负向”值,则会引发指令错误。 对于受控轴,当轴位置超出“软行程限位 - 负向”值时,可以通过故障复位清除软行程限位故障,使轴可以运动回软行程限位范围内。只要轴不会在指令控制下进一步沿远离行程限位的方向运动,就不会生成软行程限位故障。 |
3...31 | 保留 | - |
提供反馈