运动控制信号属性
与轴关联的运动控制信号属性提供对轴的当前和历史位置、速度和加速度信息的访问。这些值可作为用户程序的一部分,用于实现与运动控制应用程序相关的复杂实时计算。
小贴士:
对于任何以位置、速度或加速度单位表示的属性,都需要“变换”(Scaling) 页面参数的配置才能返回有意义的值。
所有运动控制信号属性均支持通过 Logix Designer 应用程序进行直接标签访问。因此,可以在程序中以 <轴标签名称>.<运动状态标签名称> 的形式直接引用运动信号属性。例如,FeedAxis.ActualPosition。
为避免用户不感兴趣的某些运动状态标签的实时转换的相关不必要处理器工作,需使用关联运动组的“自动标签更新”属性显式激活这些属性的实时更新。运动控制信号属性的子集必须启用“自动标签更新”属性才能执行变换转换。如果禁用,标签值将被强制为零。以下属性会受到影响:
- 实际位置
- 实际速度
- 实际加速度
- 主轴偏移
- 给定位置
- 给定速度
- 给定加速度
- 平均速度
以下所列为与运动控制轴相关的信号属性:
实际位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/GSV | T | REAL | - | - | - | 位置单位 标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。 |
“实际位置”属性表示轴的当前绝对位置,以该轴配置的位置单位表示。此值基于作为正在进行的同步数据传输过程的一部分报告给 Logix 处理器的数据,这会导致延迟一个近似更新周期。因此,获得的实际位置值是一个近似更新周期之前的轴的实际位置。
标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。
轴测试模式
“测试模式”属性设置为“已启用”且配置用于“控制器回送”的轴使用两次控制器更新的模拟延时完美地跟踪命令位置。
抓拍实际位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/GSV | T | REAL | - | - | - | 位置单位 |
抓拍给定位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取/GSV | T | REAL | - | - | - | 位置单位 |
“抓拍实际位置”和“抓拍给定位置”属性用于在执行 MGSP(运动组抓拍位置)指令时同时存储轴的实际位置、给定位置和主轴偏移位置的快照。以配置的轴位置单位存储值。
由于 MGSP 指令同时存储指定轴组中所有轴的实际位置和给定位置,因此可根据所得不同轴的“抓拍实际位置”和“抓拍给定位置”值执行实时计算。
例如,可以在两个轴之间比较“抓拍实际位置”,以便在卷纸处理应用中提供一种转差补偿形式。
起始位置和启动给定位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取/GSV | T | REAL | - | - | - | 位置单位 |
每当为轴启动新的运动轨迹规划器指令时(例如,使用 MAM 指令),将在运动开始时立即存储轴给定位置和实际位置的值。这些值采用配置的轴位置单位,分别存储为“启动给定位置”和“启动实际位置”。
启动位置可用于纠正事件检测与事件发起的动作之间发生的任何运动。例如,在线圈绕组应用中,可以在表达式中使用“启动给定位置”来补偿线筒末端的过冲(在反转传动方向之前)。
如果知道传动方向应发生改变时的线圈位置以及实际发生改变时的位置(“启动给定位置”),则可以计算过冲量,并用它来校正线槽的位置(相对于线筒)。
平均速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/GSV | T | REAL | - | - | - | 位置单位/秒 |
“平均速度”属性表示轴的当前速度和方向,以配置的轴位置单位/秒表示。
与“实际速度”属性值不同,该值通过基于为轴配置的“平均速度时基”求轴的实际速度平均值计算而得。平均速度是有符号值,符号表示轴当前运动的方向。
“平均速度”变量的分辨率取决于“平均速度时基”参数的当前值以及为轴配置的“转换常数”(每位置单位的反馈计数)。平均速度时基确定计算平均速度时使用的时间长度。平均速度时基值越大,速度分辨率越好,但对速度变化的响应也越慢。
可使用以下方程计算平均速度分辨率(以位置单位/秒表示)。

例如,对于位置单位为英寸且转换常数 (K) 为 20000 的轴,平均速度时基为 0.25 秒时可得到的平均速度分辨率为:

最小平均速度时基值是由关联的运动组对象定义的一个近似更新周期。
标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。
实际速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/ GSV | T | REAL | - | - | - | 位置单位/秒 标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。 |
“实际速度”属性表示轴的瞬时测量的当前速度和方向,以配置的轴位置单位/秒表示。该值按每个近似更新间隔内实际位置的当前增量进行计算。
实际速度是有符号浮点值,符号(+ 或 -)取决于轴当前运动的方向。其分辨率不取决于平均速度时基,而取决于轴的转换常数和如下事实:实际速度的内部分辨率限制为 1 个反馈计数/近似更新周期。
标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。
实际加速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - 所有 | 获取/ GSV | T | REAL | - | - | - | 位置单位/秒 2 标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。 |
“实际加速度”属性表示轴的瞬时测量的当前加速度,以配置的轴位置单位/秒^2 表示。该值按每个近似更新间隔内实际速度的当前增量进行计算。
实际加速度是有符号的浮点值。其分辨率不取决于平均速度时基,而取决于轴的转换常数和如下事实:实际速度的内部分辨率限制为 1 个反馈计数/近似更新周期
2
。标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。
监视位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 获取/ GSV | T | REAL | - | - | - | 位置单位 |
“监视位置”属性表示轴的当前设置点位置,以配置的轴位置单位表示,与在该轴的最近执行的最后 MAW(运动装备监视)指令中设置的一样。
记录 1 位置和记录 2 位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 获取/ GSV | T | REAL | - | - | - | 位置单位 |
提供两个记录位置属性,用于独立存储与两个不同的记录输入事件相关联的轴位置。“记录位置”值是在发生该轴的最近记录事件时物理或虚拟轴的绝对位置(以该轴的位置单位表示)。
下图显示发生记录事件时通过记录输入锁定记录位置的方式。锁定机制可通过控制器软件实现(软记录);或者,为获得更高的精度,也可以通过物理硬件实现(硬记录)。
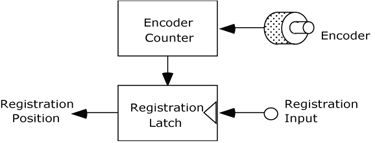
记录锁定机制由两条事件控制指令 MAR(运动装备记录)和 MDR(运动解除记录)进行控制。
记录位置值的精度保存为记录事件结果,是识别指定转换中的延时(对于硬件记录,通常为 1 µs)和此时间内轴速度的函数。记录位置的不确定性为该时间间隔内轴行进的距离,如下式所示:

使用上面给出的公式计算预期轴速度时的最大记录位置误差。或者,可以通过重新变换该公式来计算指定记录精度时的最大轴速度:

记录 1 时间和记录 2 时间
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 获取/ GSV | T | DINT | - | - | - | CST 时间(以微秒为单位) |
这两个记录时间值包含其各自记录事件发生时的 CST 时间的低 32 位。此属性的单位是微秒。
插补时间
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 设置/ SSV | T | DINT | - | - | - | CST 插补时间 |
“插补时间”属性是用于计算插补位置的 32 位 CST 时间。使用有效 CST 值更新此属性时,会自动计算“插补实际位置”和“插补给定位置”值。
插补实际位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 获取/ GSV | T | REAL | - | - | - | 位置单位 |
“插补实际位置”属性是在“插补时间”属性指定的时刻实际位置的插补值(基于过去的轴轨迹历史记录)。
给定位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取/ GSV | T | REAL | - | - | - | 位置单位 标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。 |
“给定位置”属性是物理轴的所需位置或给定位置,以该轴配置的位置单位表示,由控制器生成以响应先前的任何运动位置控制指令。给定位置数据作为正在进行的同步数据传输过程的一部分,由 Logix 处理器传输到物理轴,这会导致延迟一个近似更新周期。因此,获得的给定位置值是从现在起一个近似更新周期后物理伺服轴将要使用的给定位置。
下图显示了带有激活伺服环的轴的实际位置、给定位置和位置误差之间的关系。实际位置是由反馈设备(例如编码器)测量的轴的当前位置。位置误差是伺服环的给定位置与实际位置之差,用于驱动电机以使实际位置等于给定位置。
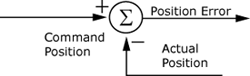
若在轴运动时,根据轴的当前位置执行运动计算和增量运动,给定位置非常有用。使用给定位置(而非实际位置)可避免执行计算时轴的位置误差所引起的误差。
标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。
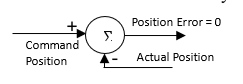
轴测试模式
“测试模式”属性设置为“已启用”且配置用于“控制器回送”的轴在复制命令位置时会考虑模拟的控制器-驱动器接口延时。这会导致零位置误差。
抓拍给定位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取/ GSV | T | REAL | - | - | - | 位置单位 |
“抓拍实际位置”、“抓拍给定位置”和“抓拍主轴偏移”属性用于在执行 MGSP(运动组抓拍位置)指令时同时存储轴的实际位置、给定位置和主轴偏移位置的快照。以配置的轴位置单位存储值。
由于 MGSP 指令同时存储指定轴组中的所有轴的实际位置和给定位置,因此得到的不同轴的“抓拍实际位置”、“抓拍给定位置”和“抓拍主轴偏移”值可用于执行实时计算。例如,可以在两个轴之间比较“抓拍实际位置”,以便在卷纸处理应用中提供一种转差补偿形式。
启动给定位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取/ GSV | T | REAL | - | - | - | 位置单位 |
每当为轴启动新的运动轨迹规划器指令时(例如,使用 MAM 指令),将在运动开始时立即存储轴给定位置和实际位置的值。这些值采用配置的轴位置单位,分别存储为“启动给定位置”和“启动实际位置”。
启动位置可用于纠正事件检测与事件发起的动作之间发生的任何运动。例如,在线圈绕组应用中,可以在表达式中使用“启动给定位置”来补偿线筒末端的过冲(在反转传动方向之前)。
如果知道传动方向应发生改变时的线圈位置以及实际发生改变时的位置(“启动给定位置”),则可以计算过冲量,并用它来校正线槽的位置(相对于线筒)。
给定速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取/ GSV | T | REAL | - | - | - | 位置单位/秒 标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。 |
给定速度是指轴的给定速度和方向,以配置的轴位置单位/秒表示,由先前的任何运动指令生成。该值按每个近似更新间隔内给定位置的当前增量进行计算。给定速度是有符号的值,符号(+ 或 -)取决于轴按命令进行运动的方向。
给定速度是有符号的浮点值。其分辨率不取决于平均速度时基,而取决于轴的转换常数和如下事实:给定速度的内部分辨率限制为 0.00001 个反馈计数/近似更新周期。
标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。
给定加速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV | 获取/ GSV | T | REAL | - | - | - | 位置单位/秒 2 标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。 |
“给定加速度”属性是指轴的给定加速度和方向,以配置的轴位置单位/秒^2 表示,由先前的任何运动指令生成。该值按每个近似更新间隔内给定速度的当前增量进行计算。给定加速度是有符号的值,符号(+ 或 -)取决于轴按命令进行运动的方向。
给定加速度是有符号的浮点值。其分辨率不取决于平均速度时基,而取决于轴的转换常数和如下事实:给定速度的内部分辨率限制为 0.00001 个反馈计数/近似更新周期
2
。标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。
给定转矩
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - VT | 获取/ SSV | T | REAL | 0 | -  | + | 额定值的百分比 |
“给定转矩”属性是指以电机额定转矩百分比为单位的给定转矩。此标签值作为正在进行的同步数据传输过程的一部分,由 Logix 处理器传输到物理轴。与“给定位置”、“给定速度”和“给定加速度”不同,“给定转矩”属性并非由运动轨迹规划器生成,而是可由应用程序直接写入。
“给定转矩”对轴没有影响,除非将轴配置为转矩环操作。为了将此属性值用作给定转矩,将执行运动驱动启动指令,这会将“运动状态位”属性的直接转矩控制状态位置位。如果该位未置位,则“给定转矩”值对轴运动没有影响。目前仅 CIP 驱动器轴数据类型支持此功能。
插补给定位置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E 仅限 PV | 获取/ GSV | T | REAL | - | - | - | 位置单位 |
“插补给定位置”属性是在“插补时间”属性指定的时刻给定位置的插补值(基于过去的轴轨迹历史记录)。
主轴偏移
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV 仅限 PV | 获取/ GSV* | T | REAL | - | - | - | 主轴位置单位 标签访问受该值支持,且只有在启用运动组对象的自动标签更新功能时才有效。 |
“主轴偏移”属性是指当前应用于位置凸轮主轴侧的位置偏移。主轴偏移以主轴位置单位返回。主轴偏移的归位特性与线性轴位置的归位特性相同。标签访问受支持,但只有在启用运动组对象的自动标签更新功能时标签值才有效。
抓拍主轴偏移
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV 仅限 PV | 获取/ GSV | T | REAL | - | - | - | 主轴位置单位 |
“抓拍主轴偏移”属性是指执行最后一条运动组抓拍位置 (MGSP) 指令时,应用于位置凸轮主轴侧的位置偏移。抓拍主轴偏移以主轴位置单位返回。抓拍主轴偏移的归位特性与线性轴位置的归位特性相同。
启动主轴偏移
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FPV 仅限 PV | 获取/ GSV | T | REAL | - | - | - | 主轴位置单位 |
“启动主轴偏移”属性是指当执行最后一条运动轴运动 (MAM) 指令(运动类型设置为绝对式主轴偏移或增量式主轴偏移)时,应用到位置凸轮主轴侧的位置偏移。启动主轴偏移以主轴位置单位返回。启动主轴偏移的归位特性与线性轴位置的归位特性相同。
直接给定速度
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - FV | 获取/ SSV | T | REAL | - | - | + | 位置单位/秒 |
“直接给定速度”属性针对指定轴提供给定速度的标签访问。当相关的驱动器配置为速度控制模式时,该属性可用于直接控制电机的速度。为了将此属性值用作给定速度,将执行运动驱动启动指令,这会将“运动状态位”属性的直接速度控制状态位置位。如果该位未置位,则“直接给定速度”值对轴运动没有影响。目前仅 CIP 驱动器轴数据类型支持此功能。
插补位置配置
用途 | 访问 | T | 数据类型 | 默认值 | 最小值 | 最大值 | 值语义 |
|---|---|---|---|---|---|---|---|
必需 - E | 设置/ SSV | T | DWORD | 0:0 1:1 | - | - | 位映射 0 = 1 = |
该位映射的属性配置插补算法,以用于基于插补时间的当前值和轴位置历史记录计算插补实际位置和插补给定位置。
“二阶实际位置插补”位控制用于基于插补时间计算插补实际位置的插补算法的阶数。如果该位置位,则使用二阶插补。如果该位清零,则使用一阶插补。通常,二阶插补可得到更精确的位置估计结果,但如果实际位置信号具有较高的量化噪声级别,则一阶插补可得到更好的结果。
“二阶给定位置插补”位控制用于基于插补时间计算插补给定位置的插补算法的阶数。如果该位置位,则使用二阶插补。如果该位清零,则使用一阶插补。通常,二阶插补可得到更精确的位置估计结果,但如果给定位置信号具有较高的量化噪声级别,则一阶插补可得到更好的结果。
提供反馈