AXIS_CIP_DRIVE 示意图
以下是各种应用类型的伺服环拓扑。
给定信号发生器
影响轴运动的给定数据可来自于各种源。最常见的给定数据源来自控制器中的运动轨迹规划器(采用 CIP Motion C 至 D 连接)。在此背景下,给定数据可采用下列形式:控制器给定位置、给定速度、给定加速度和给定转矩(均由运动轨迹规划器生成)。提供的给定数据元素由“给定数据集”属性指定,该属性基于所选控制模式。基本给定数据元素可由高阶给定信号元素扩充,以生成高质量的前馈信号。此外,也可由设备从基本给定数据派生这些高阶给定元素。无论在哪种情况下,通常都会向给定数据应用给定信号精插补器,以按设备的更新速率针对设备控制结构生成给定参考信号。
另一个给定数据源是设备中的本地运动轨迹规划器。运动控制设备轴对象定义了一组与设备中运动轨迹规划器相关联的功能。这些功能包括对电子齿轮传动、凸轮传动、运动和点动的支持。通过使用 CIP Motion 对等连接,可将齿轮传动和凸轮传动功能直接链接到主轴给定参考值(自同级设备),因而可实现高性能轴系应用。此外,还可以从本地运动轴实例派生主轴给定参考值。为实现这些功能,运动轨迹规划器还支持通过归零和重新定义位置操作以及执行旋转归位功能,建立机器的绝对位置参考。设备的运动轨迹规划器由 CIP 服务请求控制。
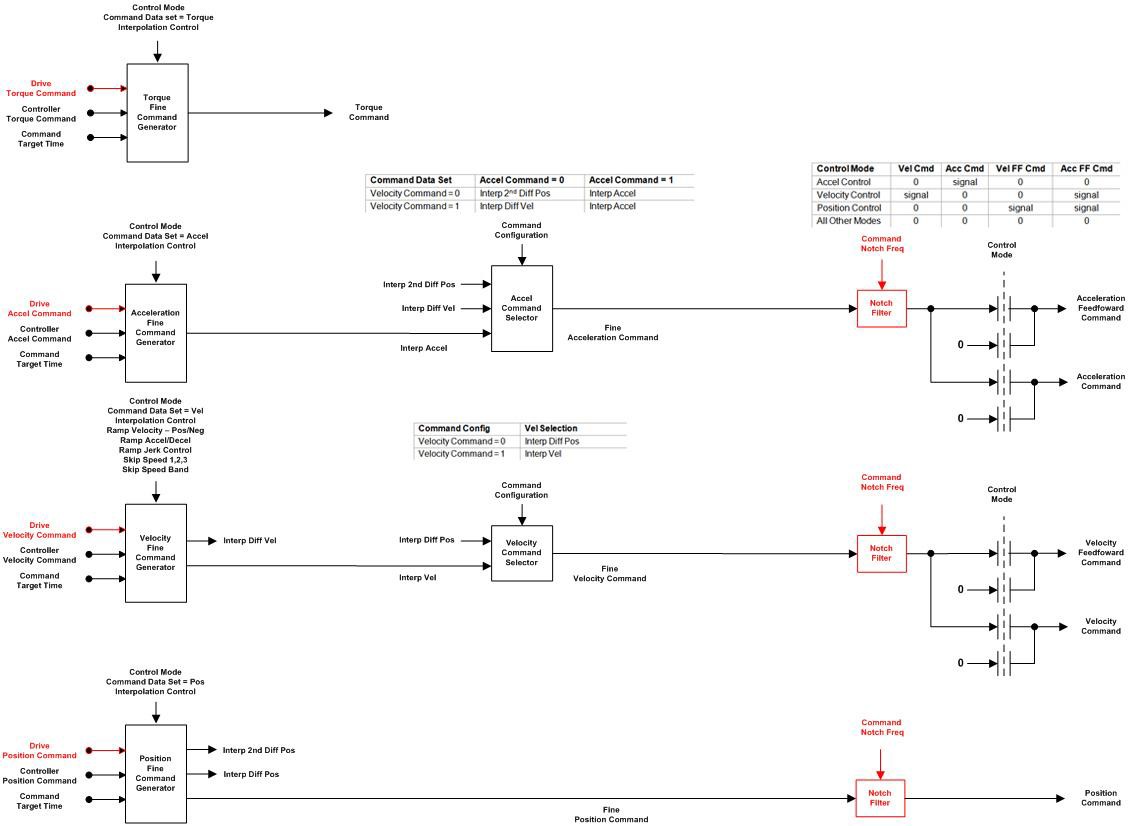
可以直接设置给定数据,例如控制器给定速度。在此背景下,设备将利用其自身的斜坡发生器功能,平滑地将电机加速或减速至给定速度。
“给定信号精插补器”和“斜坡发生器”都是在以下功能块图中所示的给定信号发生器块的功能。
给定信号精插补器
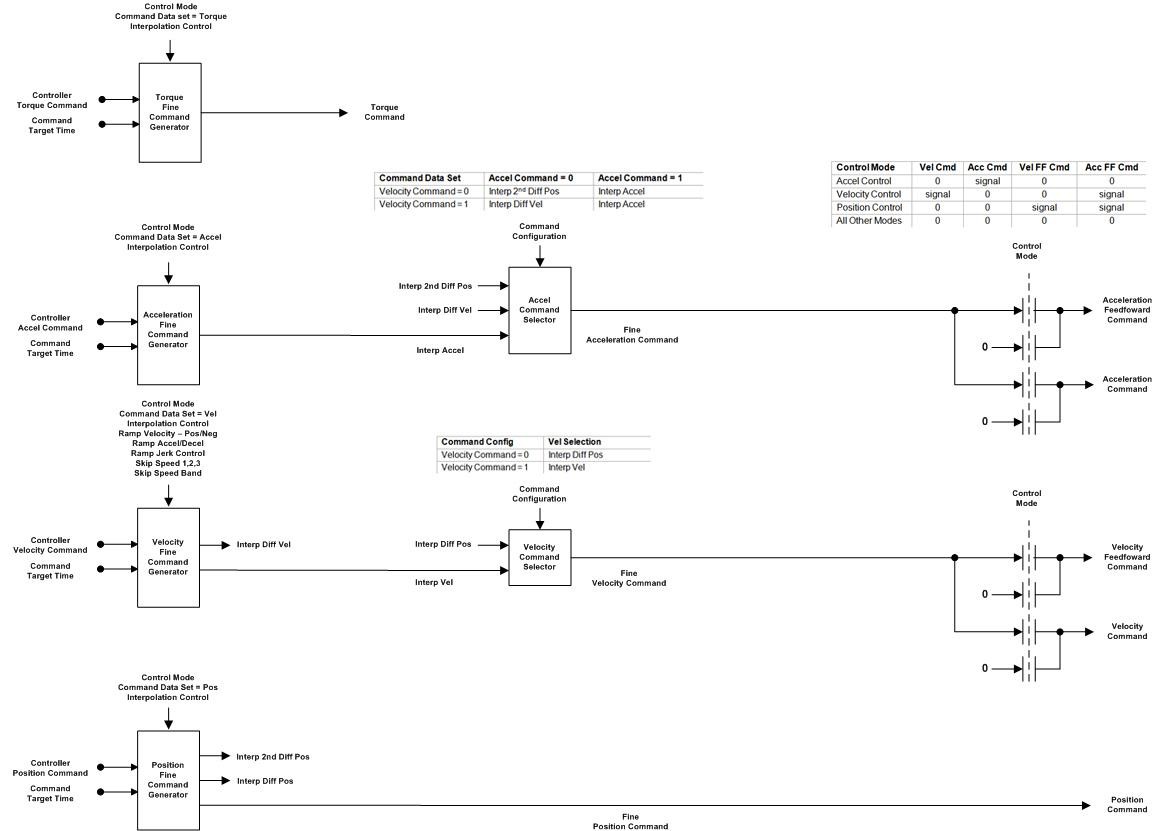
斜坡发生器
反馈通道
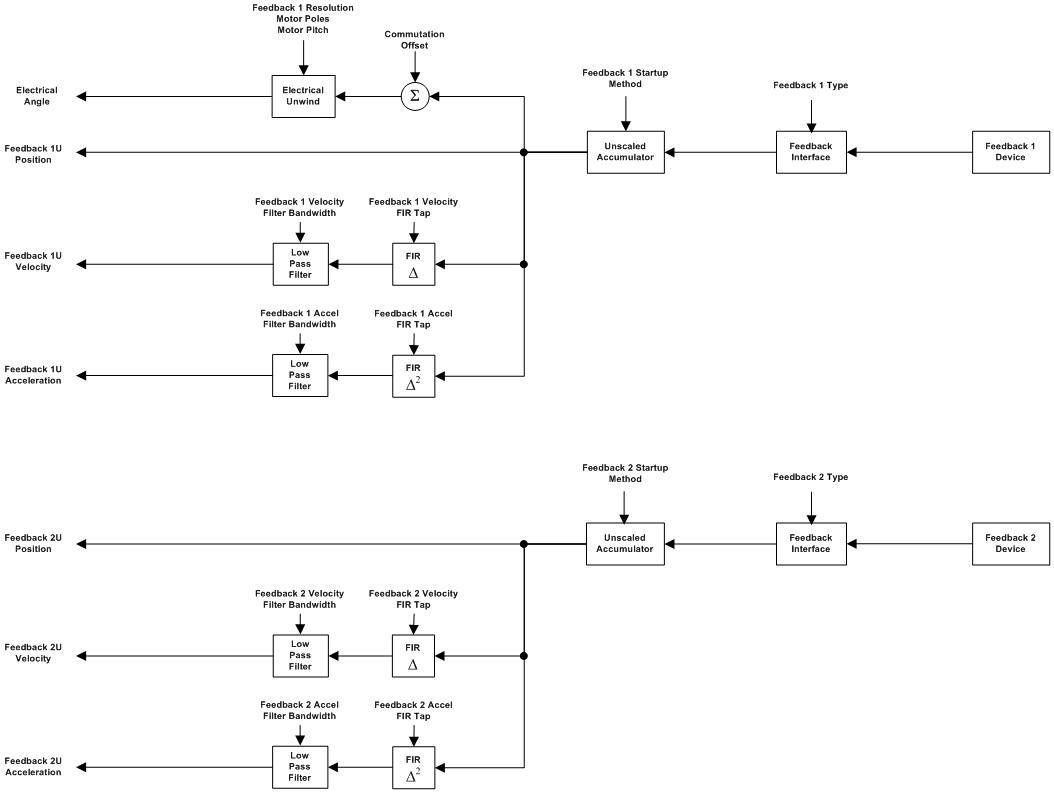
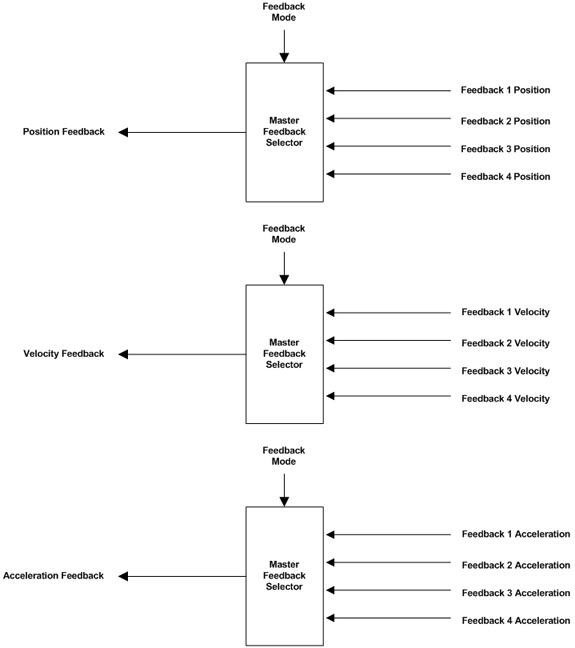
由运动控制设备轴对象定义的反馈信号可源自 4 个不同的反馈接口通道中的任一通道。各种闭环控制模式所用的两个主反馈通道是指定的反馈 1 和反馈 2。这样,控制环可以在采用电机反馈设备(通常连接到反馈 1 通道)或者负载侧反馈设备(连接到反馈 2 通道)时工作。环路使用哪种反馈源由“反馈模式”属性控制。
每个反馈接口都能够支持“反馈类型”属性枚举的多种不同的反馈设备类型。反馈接口输出是自上次对设备采样后反馈设备已运动的反馈计数数值。如果反馈设备属于绝对式设备,反馈接口还可以确定加电时反馈设备的绝对位置,并将该值传送到反馈累加器以预设该累加器。
反馈通道 1 和 2
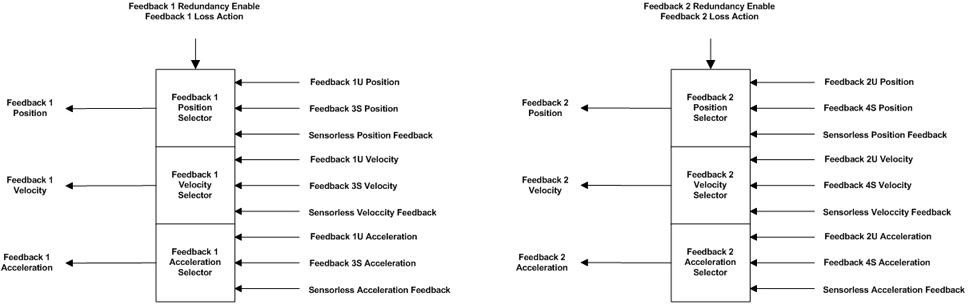
冗余反馈选项
使用变换后的累加器的输出以及变换后的速度反馈信号和加速度反馈信号,可在设备运行期间交换反馈信号,而无需中断闭环控制。使用此功能,可将辅助反馈通道用作控制所用的两个主反馈通道的冗余反馈通道。反馈 3 是反馈 1 的指定冗余反馈通道,反馈 4 是反馈 2 的冗余反馈通道。出现以下情况时,设备可自动切换到冗余反馈通道:1) 当“反馈 n 丢失动作”设为“切换为冗余反馈”时,主反馈通道丢失;或 2) 通过将循环反馈模式数据元素的“冗余反馈 n 使能”位置位,控制器显式切换到冗余通道时。
主反馈通道和冗余反馈源之间的切换可由下图所示的反馈选择器块进行控制。
事件捕获功能
事件输入源
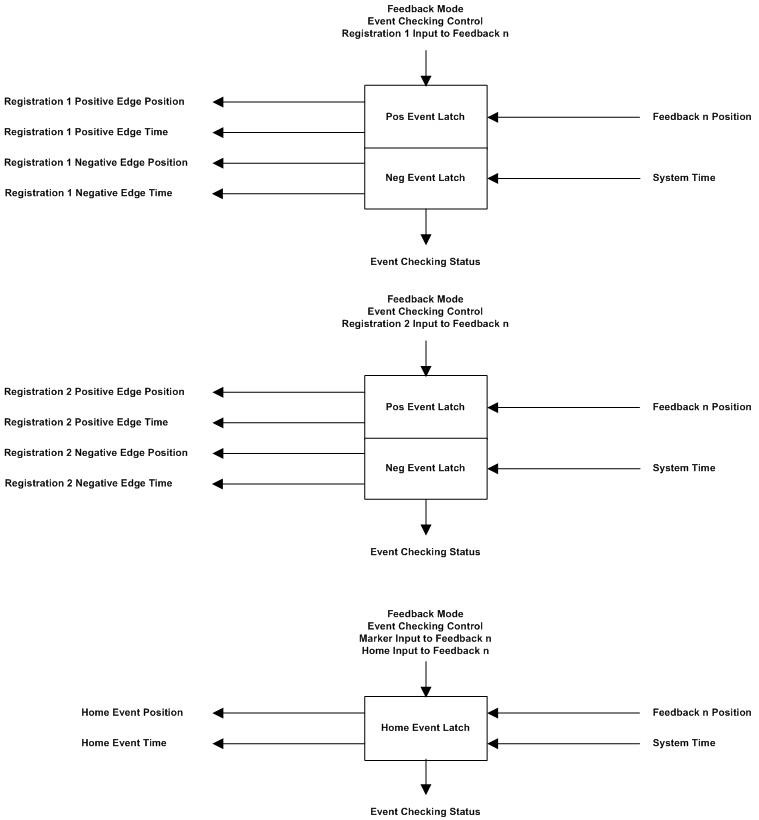
运动控制设备轴对象定义了一种机制,可捕获与所选事件输入源的特定状态转换相关的反馈位置和时戳。该对象当前支持的事件输入源包括记录 1、记录 2、标记和归零开关。此 4 种事件输入源适用于所支持的各个反馈通道。
事件锁定
为便于准确捕获反馈位置和时间,通常按下列框图所示的方式应用硬件事件锁定功能。请注意,对于每个记录输入,都将定义两个独立的锁定功能,其中一个锁定功能用于捕获上升沿跳变事件,另一个用于捕获下降沿跳变事件。通过此设计,可以捕获具有狭窄记录脉冲(在这种情况下,上升沿和下降沿几乎同时发生)的应用中的两种记录事件。除记录锁定功能以外,还为归零事件捕获定义单独的锁定功能。可触发归零事件锁定功能的归零输入事件可以是归零开关和标记输入事件的多种不同组合之一,即标记转换、开关转换或后跟标记转换的开关转换等。
对于基于硬件的事件锁定功能,事件捕获的准确性通常仅受相关事件输入的延时限制。记录和标记事件输入将进行轻度滤波,因此,事件捕获精确度约为 1 µs。对于位置捕获精确度,将按事件捕获精确度与轴速度的乘积进行计算。归零开关输入通常会进行重度滤波,因此,事件捕获精确度将限制为 1 到 10 ms。因此,要在归零开关输入转换时获得精确的位置捕获,需要使用归零速度较低的归零序列。
控制模式
在“运动控制设备轴对象”中定义的实例属性将影响“控制模式”、“控制方法”和“反馈模式”下的设备行为。设备通用的控制模式主要有四种:位置控制、速度控制、转矩控制和无控制。除此之外,还将添加一种新的控制模式:加速度控制,用于完成从速度控制到转矩控制的转换。此部分提供各种控制模式的框图,以便进一步定义各种“运动控制设备轴对象”属性的行为集合。
无控制(仅反馈)
运动控制设备轴对象实例可以配置为“无控制”模式,以允许控制器通过“设备到控制器”的连接访问四个可能的反馈通道中任一通道的位置、速度和加速度。然后,这些信号可作为主轴信号分布到运动控制系统中,以进行齿轮传动和凸轮传动操作。在此模式下,“反馈模式”属性可确定生成位置、速度和加速反馈信号的反馈通道。
位置控制
在位置控制模式下,此对象当前支持的唯一有效控制方法只有闭环伺服控制。
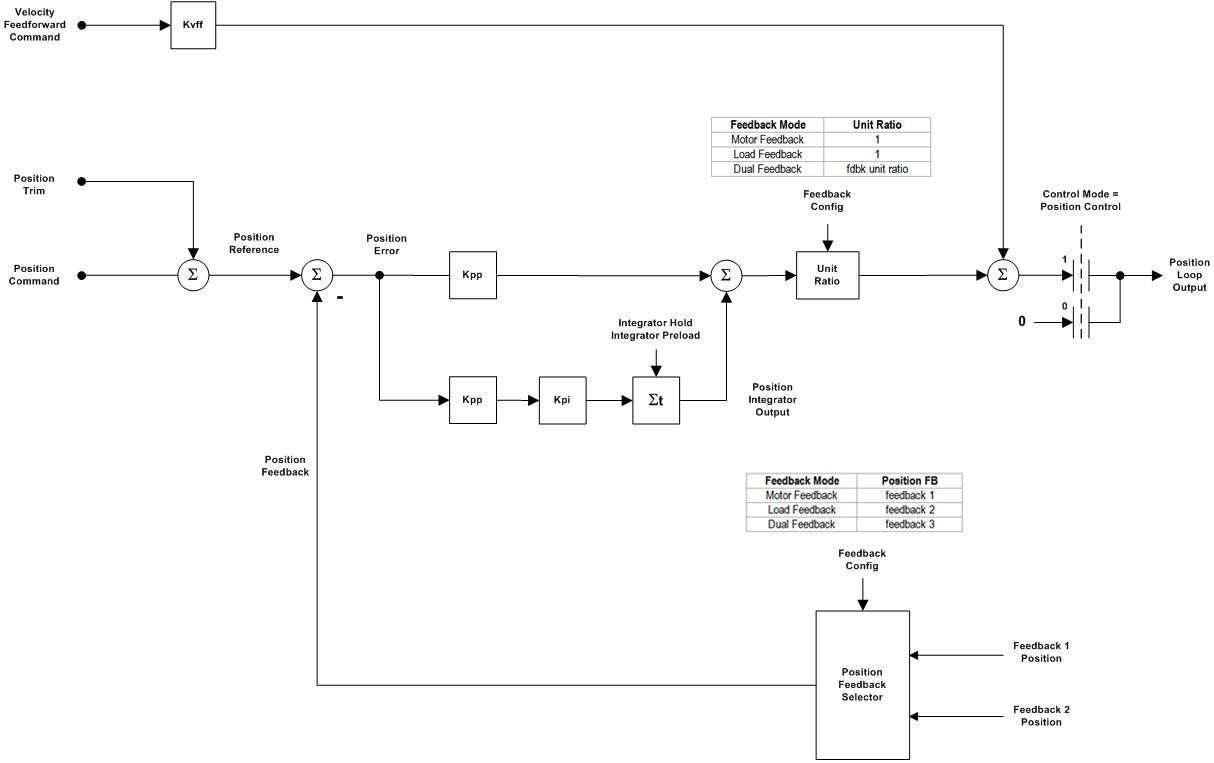
闭环位置控制
当执行闭环位置控制时,设备会将给定信号发生器的给定位置信号输出应用于位置环求和点。除给定位置外,还提供了位置调整输入,可用来实现位置环的偏移。经典 PI 控制环将生成输入至速度内环的位置环输出信号。
位置反馈选项
输入至 PI 调节器的反馈信号可从两个不同的反馈通道获得。借助这种灵活性,位置环可在采用电机反馈设备(通常连接到反馈 1 通道)或者负载侧反馈设备(连接到反馈 2 通道)时工作。环路使用哪种反馈源由“反馈模式”属性控制。
当“反馈模式”调用双反馈操作时,位置环将使用反馈 2 通道,而速度环将使用反馈 1 通道。由于这两个反馈通道可能具有不同的反馈分辨率,所以在将输出应用于速度环求和点之前,必须先将位置环输出从反馈 1 单位转换为反馈 2 单位。可使用“反馈单位比”通过“单位变换”块对位置环输出进行变换,由此执行此操作。
位置 PI 增益
经典 PI 控制器的比例增益用于设置位置环的统一增益带宽(弧度/秒),而积分增益则用于将位置误差信号修正为零,以补偿施加给负载的任何静态和准静态转矩或力的作用。
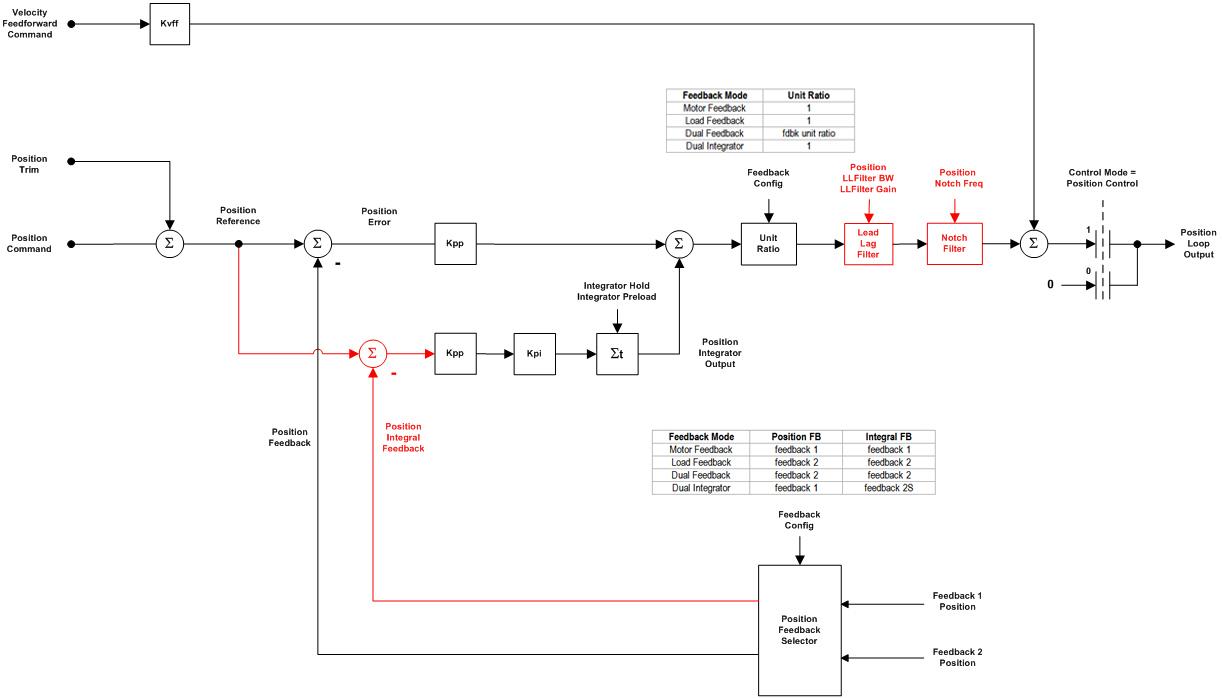
速度前馈 (Velocity Feedforward)
内部速度环需要一个非零的命令输入,用以产生稳定的轴电机速度。要将来自设备的非零输出提供给电机,需要非零位置环输出,这会引发非零位置误差。这一在运动过程中给定位置与实际位置之间的动态误差通常称为跟踪误差。大多数闭环运动控制应用都要求跟踪误差始终为零!这在某种程度上可以通过上述位置积分增益控制来实现,但积分器动作的响应时间通常过慢,因而在高性能运动控制应用中无效。要获得更佳的动态响应,另一种方法是使用速度前馈。
在位置控制模式下,速度前馈功能将提供必要的主要速度参考输入,以产生所需电机速度。在此期间,给定信号发生器的给定速度前馈信号输出经速度前馈增益变换,再添加到由位置环生成的位置环输出,以产生速度参考信号。通过该功能,位置环不需要太多工作即可生成所需的给定速度级别,从而可以显著降低位置误差。以恒速运行时,“速度前馈增益”可使位置控制环的跟踪误差减小到接近于零。对于任何时候实际轴位置都不能明显滞后于给定位置的电子传动和同步应用等应用场合,这一点非常重要。
理论上,最佳的“速度前馈增益”值为 100%。而在实际中,考虑到环增益有限的速度环,可能需要相应调整该值。当前馈增量可能加重轴的过冲情况时,可能会强制使用较小的速度前馈值。因此,对于点到点定位的应用场合,不建议使用前馈。
速度控制
在速度控制模式下,此对象支持两种有效的控制方法,即闭环速度控制和开环频率控制。
闭环速度控制
闭环速度控制方法适用于要求进行严格调速的应用。请注意,当配置为速度控制模式时,速度环的给定输入可直接源自给定信号发生器的给定速度;或者当按前文所述配置为位置控制模式时,速度环的给定输入可直接源自位置环输出。
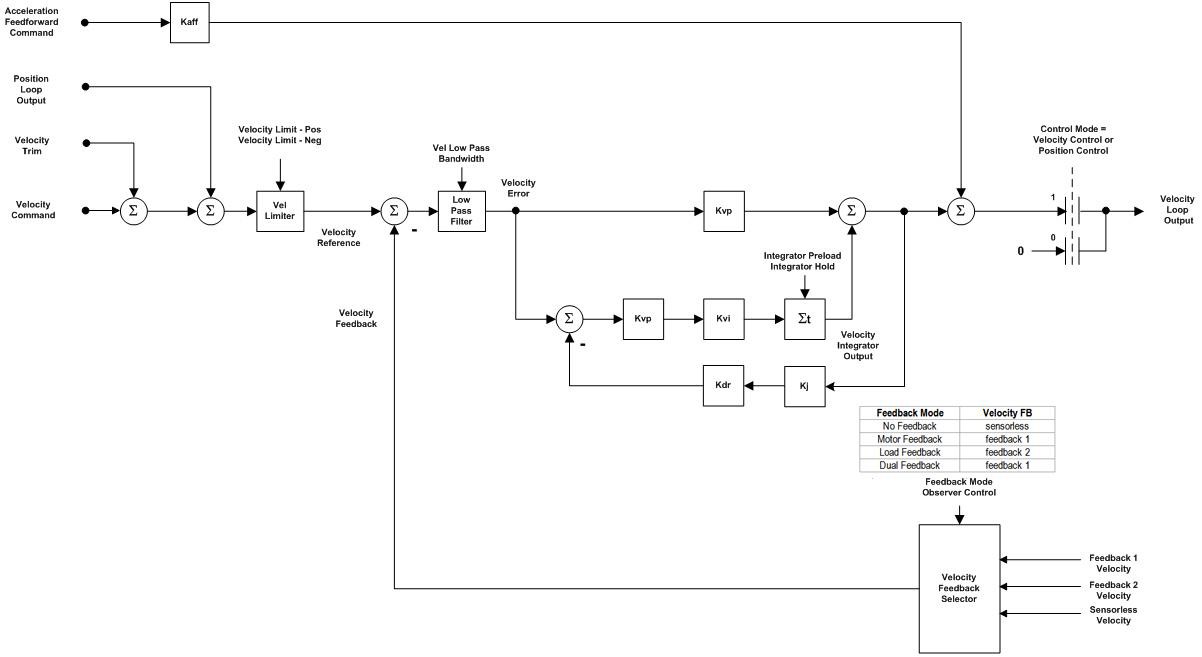
当在速度控制模式下用作速度外环时,设备将给定速度输入应用于给定速度求和点,生成输入经典 PI 调节器的速度参考信号。应用于给定速度求和点的另一项为速度调整输入,该输入可与控制外环配合使用,对电机速度进行微调。
当在位置控制模式下用作速度内环时,设备会将位置环输出信号应用于给定速度求和点的输入。对所配置的控制模式不适用的输入信号通常会设为零。
速度限制器
给定速度求和点信号的输出信号将通过经典限制器块,生成输入速度环的速度参考信号。速度限制器块会基于此信号的符号将有方向的速度限制(速度限制 - 正向或速度限制 - 负向)应用于给定速度信号输入。
速度前馈选项
输入至 PI 调节器的反馈可源自两个可用反馈传感器(反馈 1 或反馈 2)中的任一个。环路使用哪个反馈源取决于“反馈模式”枚举值。
速度误差滤波器
用户可根据需求选择将低通滤波器应用于速度环求和点生成的速度误差信号。此滤波器的输出将变为速度误差信号,该信号随后将由速度环路 PI 控制算法进行操作。使用时,通常会将此滤波器频率设置为速度环带宽的 5 到 10 倍。建议采用双极 IIR 滤波器,以便在量化噪声滤波时发挥最大效力。
速度 PI 增益
速度环将生成速度环输出信号,此信号经由 PI 控制环结构输入至下一内环。控制器的比例增益用于设置速度环的统一增益带宽(弧度/秒),而积分增益用于使速度误差信号降为零,以补偿施加给负载的任何静态和准静态转矩或力的作用。积分器路径包括比例增益,因此积分增益的单位表示积分器的带宽(弧度/秒)。
速度调节器的积分部分包括抗积分饱和功能。当达到正向路径的限制条件时,抗积分饱和功能会自动保持调节器的积分项。抗积分饱和功能受到积分器输入算术符号的约束。当输入的符号使积分器输出进一步移向活动限制时,将保持积分器。换句话说,积分器可以在输入可能导致积分器输出值超出活动限制时进行工作(不挂起)。
此外,还可以对积分器进行配置,以实现积分器挂起操作。如果“积分器挂起”属性设为真,则调节器在轴受控运动时将使积分器保持而不进行累加。此行为在点对点定位应用中很实用。
当使用控制模式选项参数由转矩控制模式转换为速度控制时,将启用速度调节器积分项的自动预设功能。在转换为速度模式时,速度调节器的积分项将预设为电机转矩参考参数。如果速度误差较小,此操作将在进入速度模式之前,实现从存在的上一转矩参考值进行的无扰动转换。
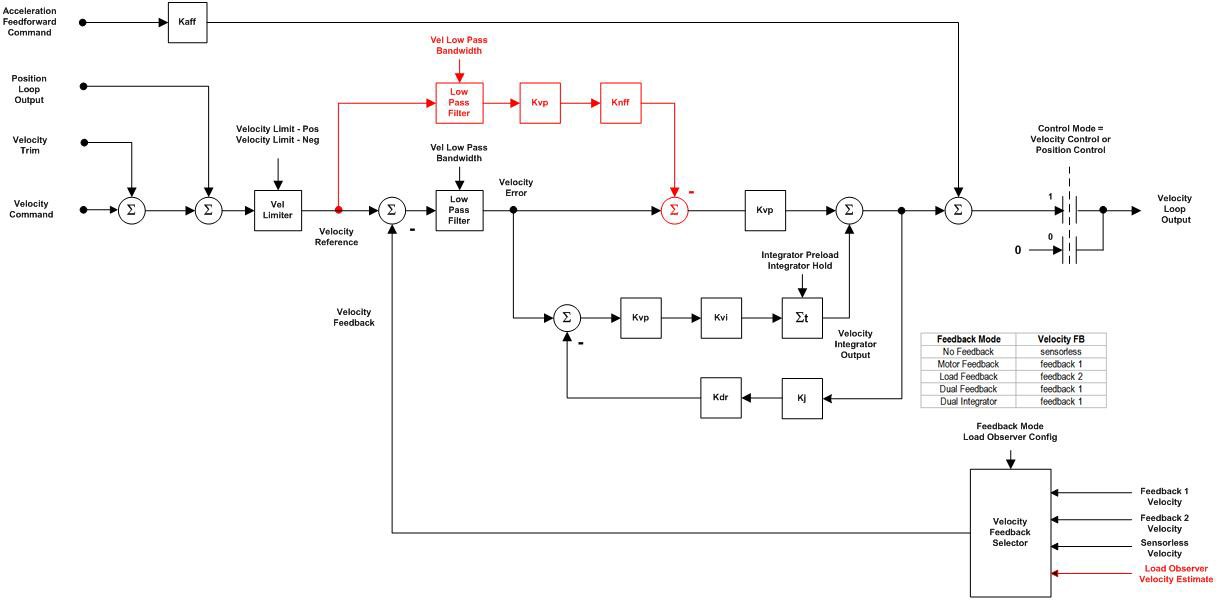
负前馈
除正常的 PI 控制元素以外,还提供了负前馈增益 (Knff),用于调整速度调节器的时间响应。Knff 的范围是 0 到 100%,值为零时将禁用该功能。值为 30% 时,会导致阶跃输入的速度响应稍稍出现过冲。当电机速度斜降至零时,会很容易观察到这种情况。负前馈的作用是消除电机轴后退。设置的 Knff 增益对速度调节器的稳定性没有任何影响。使用负前馈的缺点是,会导致参考斜坡输入的反馈响应发生时间滞后。
速度下调
速度调节器的另一个功能是速度下调功能。可将积分项的速度误差输入在设置的下调增益 (Kdr) 控制下减少速度调节器输出所示的量。随着电机上的转矩负载增加,实际电机速度将与下调增益成比例地降低。当因两台电机间的刚性机械耦合而需要一定级别的柔性时,此功能非常有用。
加速度前馈
速度环需要非零速度环输出,以生成稳定的轴电机加速度。要从驱动器向电机提供非零输出,通常需要非零速度误差。在位置控制应用中,此非零速度误差会转换为非零位置环误差。由于许多闭环运动控制应用都需要控制环误差接近于零,因此不希望出现此行为。再者,可以应用上文所述的速度积分增益控制来减小位置环和速度环误差,但积分器动作仍然太慢,并不能有效发挥作用。要获得最佳的动态响应,首选方法是使用加速度前馈。
“加速度前馈增益”属性用于生成输出信号,从而由此生成给定加速度。将给定信号发生器生成的给定加速度前馈经加速度前馈增益进行变换,然后以偏移形式加到速度环输出,可实现此操作。使用此功能,速度环无需生成较大的控制作用,因此可以减小控制环误差。
理论上,最佳的“加速度前馈”值是 100%。但实际上,可能需要根据负载惯量和电机转矩常数的变化对此值进行调整。与速度前馈类似,加速度前馈可能会引发过冲行为,因此不应将其用于点对点定位应用。
当与“速度前馈”配合使用时,“加速度前馈”可使位置控制环或速度控制环的跟踪误差在运动的加速和减速阶段降至接近于零。此特性对于使用电子传动和凸轮传动的跟踪应用非常重要,可将从轴的运动与主轴运动精确同步。
开环频率控制
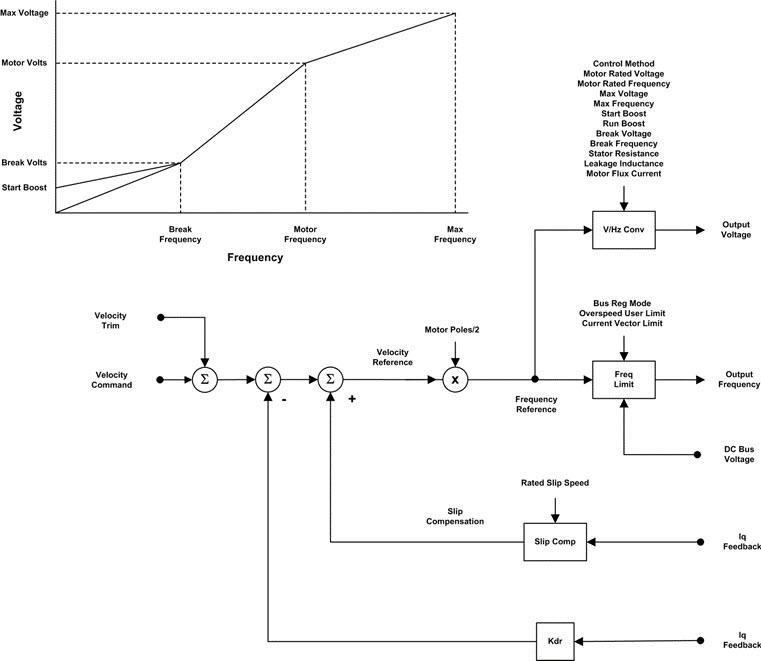
另一种速度控制方法是开环频率控制方法,该方法与所谓的 U/f 变频器或变频驱动器 (VFD)(不具备电流控制环并且通常驱动感应电机)相关。采用此方法时,通过以一定方式控制驱动器设备的电压和频率进行速度控制,此时,电压通常与频率成正比。对于感应电机,将驱动器设备的输出频率除以电机极数,即可得到电机速度。此控制方法适用于不需要严格调速进而不需要反馈设备的速度控制应用。下文框图进一步说明了此开环速度控制方法。
基本的 U/f 操作
运动控制设备轴对象的多个属性都可用于指定驱动器设备使用的给定(感应)电机输出频率(速度)与输出电压间的关系。“转折频率”和“转折电压”属性用于定义 U/f 曲线上的某个点,曲线达到该点之下时将应用启动升压功能。顾名思义,“启动升压”用于向处于静止状态的电机提供非零输出电压,以帮助电机启动。当电机达到转折频率时,“启动升压”对驱动器设备输出电压的帮助作用将减至零。高于转折点时,输出电压和输出频率会按照某一线性斜度上升至由电机额定频率和电机额定电压定义的点。从该点起,U/f 曲线会按照另一线性斜度上升至由“最高频率”和“最高电压”属性定义的点。对于需要以高于电机额定频率和额定电压工作的应用,此段 U/f 曲线有助于实现此操作。
无传感器矢量控制
无传感器矢量控制是一种替代的速度控制方法。这种方法无需配置 U/F 曲线,而是由驱动器设备根据获知的电机“定子电阻”和“漏电感”,计算给定“输出频率”下对应的“输出电压”值。与使用基本的 U/F 方法相比,使用此方法可提供更好的低速速度控制行为。
转差补偿
在一定频率下驱动感应电机时,电机的实际转速一般低于指令转速(等于输出频率除以电机极数),两者差值与加在电机上的负载转矩成正比。此转速差称为“转差”,是电机固有的结构特性。“运动控制设备轴对象”支持变频器中普遍存在的“转差补偿”特性。针对“速度参考值”的“转差补偿”量等于转矩电流 (Iq) 测量值与“感应电机额定转差速度”设定值的乘积。
速度下调
“频率控制”方法的另一个功能是速度下调。下调功能可使速度参考值按转矩电流 (Iq) 的一定比例下降,具体通过下调增益设定值 (Kdr) 进行控制。当电机上的转矩负载增加时,电机实际速度按下调增益成比例减低。两台电机共同拖动一台负载会涉及到转矩分配,此时如果要求电机具有一定程度的柔性,则该功能就非常适用。
加速度控制
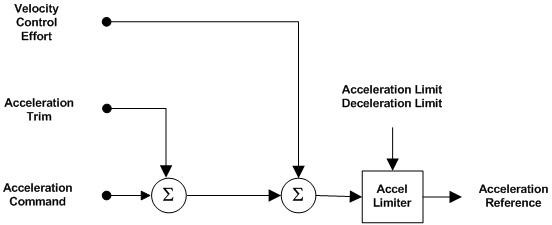
(ODVA/IEC 版本)尽管通过给定加速度对电机进行动态控制在业内并不常见,仍向运动控制设备轴对象添加了加速度控制,以完成从速度控制到转矩控制的动态转换。速度环的输出(速度环输出)也采用加速度的单位。因此,与其他控制模式相同,综合考虑给定加速度、加速度调整和速度环输出的作用,生成用作转矩控制主要输入之一的加速度参考信号。
加速度限制器
给定加速度求和点信号的输出将通过经典限制器块,以生成加速度参考信号。加速度限制器块将有方向加速度限制(加速度限制或减速度限制)根据信号的符号应用于给定输入信号。
转矩控制
转矩通常与加速度和转矩电流 (Iq) 成比例。转矩控制结构的用途是,将各输入信号相结合,根据控制模式从多种不同的源创建转矩参考信号,并将各种滤波器和补偿算法应用于转矩参考信号以创建滤波后的转矩参考信号。滤波后转矩参考信号经电机转矩常数 (Kt) 倒数的变换后,产生电流环给定 Iq 电流输入。由于电机电流还将归一化为电机“额定电流 %”,因此转矩常数 (Kt) 名义值为 1。换句话说,通常假定 100% 额定电流生成 100% 的额定转矩。
转矩输入源
“转矩控制”部分可根据控制模式从多个源采集输入信号。在转矩控制模式下,可通过循环给定转矩或转矩调整信号来获取转矩参考路径的输入。在位置或速度控制模式下,转矩输入由外部速度环或加速度环产生,此时需引入产生的加速度信号并将这些信号变换为等效转矩。
加速度变换为转矩
由于进入转矩控制部分的加速度输入信号以加速度单位表示,因此需要通过一个变换系数 (Kj) 将加速度单位转换为额定转矩百分比转矩单位。经过正确配置后,该变换系数代表总系统惯量或包括电机和负载在内的系统质量,可以消除系统惯量/质量对控制环响应和环增益设置的影响。由于转矩单位以电机额定转矩百分比表示,因此“系统惯量”属性的单位为额定值百分比/(电机单位/秒^2)。但是,请注意,加速度单位可以用反馈 1 或反馈 2 单位表示,具体取决于反馈模式设置。因此,在反馈 2 适用的情况下,加速度信号需通过反馈单位比(如下图所示的“单位比”块)进行变换。
回差补偿
转矩控制图中包括了多种重要的补偿功能。在具有高负载惯量比和机械回差的应用中,可通过回差补偿来稳定设备控制环行为。
“回差补偿窗口”属性用于控制回差补偿功能。在使用机械变速箱的应用中,机械回差是一个常见问题。产生这种问题的深层原因在于,当输入齿轮转至其近端轮齿与输出齿轮的相邻轮齿接触前,电机感受不到输出的反射惯量。也就是说,当轮齿未啮合时,系统惯量降至电机惯量。
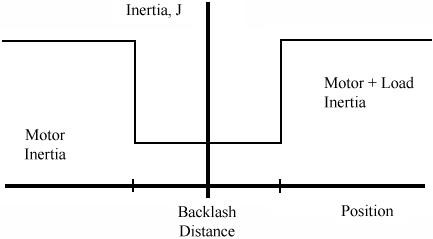
在最坏状况下,电机轴与输入齿轮将剧烈振荡,振荡范围取决于输出轮齿。在轴静止时,其净效应是发出一声很大的蜂鸣声,这通常称为“变速箱震颤”。如果这种情况持续存在,变速箱将提前老化。为防止这种情况,常规做法是将速度环去调谐,使轴在未施加变速箱负载的情况下保持稳定。然而,遗憾的是,这样做会影响系统性能。
回差稳定算法使用与机械系统回差量相当的“回差稳定窗口”值,既能非常有效地消除由回差引起的不稳定问题,同时又能保持整体系统带宽。此算法的关键是一个锥形的 Kj 曲线(如下图所示),此曲线是由位置环位置误差导致的。使用锥形曲线而非阶跃曲线的原因是,当位置误差超出回差距离时,阶跃曲线会造成转矩输出严重的不连续性。这种反推转矩会将轴向回推至对侧轮齿上,使蜂鸣效果持续存在。可将锥形曲线限定为仅在控制环结构的给定加速度或给定速度为零时运行,即不执行将导致变速箱轮齿啮合的运动时。
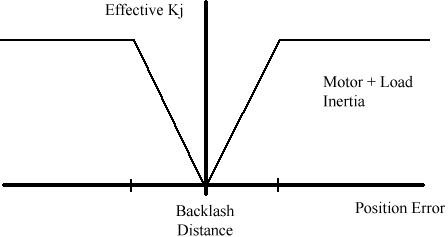
如果正确配置合适的回差补偿窗口值,此算法可在不牺牲伺服性能的同时完全消除变速箱蜂鸣。“回差补偿窗口”参数决定着实施回差稳定处理的窗口宽度。通常情况下,该值应等于或大于测得的回差距离。“回差稳定窗口”值为零时,将实际禁用该功能。
提供反馈