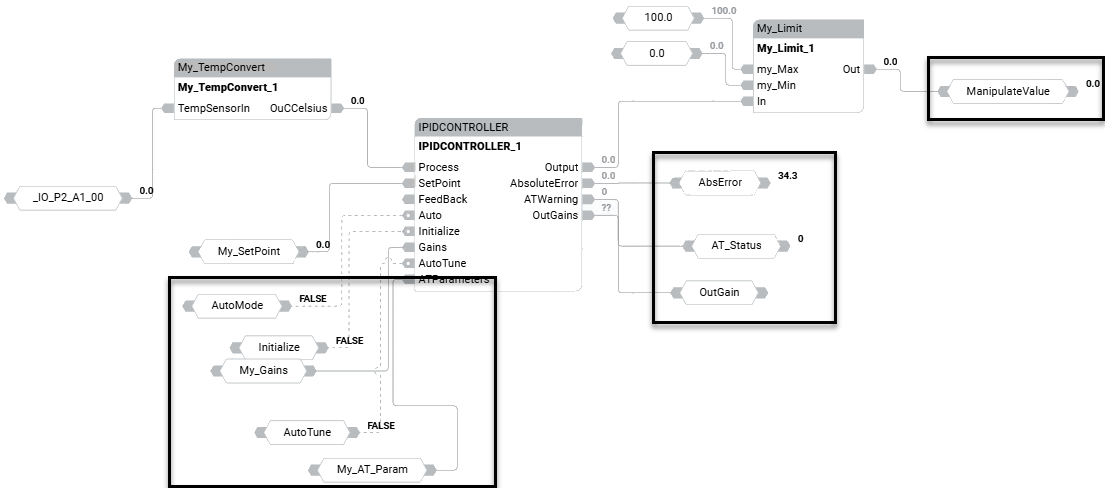
示例:具有自动调节的 IPIDController
以下示例程序展示了用于配置自动调节参数的变量。
具有自动调节的 IPIDController
自动调节参数
下表描述了与示例中的每个参数一起使用以配置自动调节的变量。
输入参数 | ||
|---|---|---|
变量 | 参数 | 描述 |
AutoMode | Auto | PID 控制器的操作模式:
|
Initialize | Initialize | 初始化 AutoTune 序列。 值的更改(TRUE 更改为 FALSE 或 FALSE 更改为 TRUE)会导致控制器在相应循环期间消除任何比例增益。 |
My_Gains | Gains | 建立 IPIDController 的增益 PID。 |
My_Gains.DirectActing | DirectActing | 定义输出的操作类型。
|
My_Gains.ProportionalGain | ProportionalGain | “PID 的比例增益”(>= 0.0001)。 |
My_Gains.TimeIntegral | TimeIntegral | “PID 的时间积分值”(>= 0.0001)。 振荡趋势会随着 ti 降低而提高。 |
My_Gains.TimeDerivative | TimeDerivative | “PID 的时间微分值”(> 0.0)。 随着微分时间增加,阻尼也会增加,但是如果微分时间太大,则会减小。 |
My_Gains.DerivativeGain | “PID 的微分增益”(> 0.0)。 | |
AutoTune | 当设置为 TRUE 且 Auto 和 Initialize 为 FALSE 时,会启动 AutoTune 序列。 | |
ATParameters | ||
Load |
| |
Deviation |
| |
Step | 自动调节过程考虑过程值如何对步长值的变更做出反应并派生 Gain 参数。 | |
ATDynaSet |
| |
ATReset |
| |
输出参数 | ||
AbsoluteError | 来自控制器的绝对错误 (Process – SetPoint)。 | |
ATWarning | 自动调节序列的警告。可能的值有:
| |
OutGains | 在 AutoTune 序列之后计算的增益。 | |
提供反馈