PID 指令时间图
以下时间图示例描述了 PID 指令的执行场景。
PID 执行成功
PID 执行成功
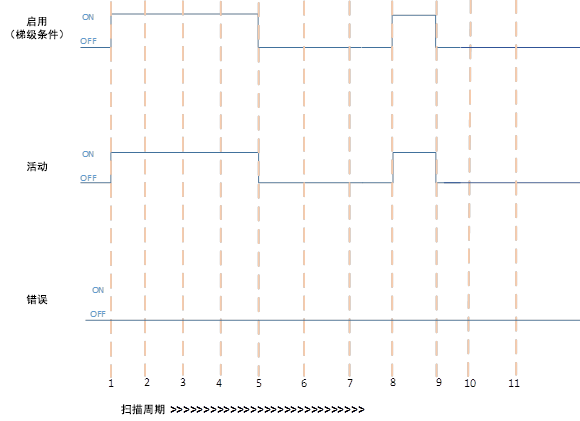
扫描周期 | 描述 |
|---|---|
1,8 | 在下列情况下梯级条件变为 TRUE:
|
2,3,4 | 梯级条件未发生更改。
|
5,9 | 在下列情况下梯级条件变为 FALSE:
|
6、7、10、11 | 梯级条件未发生更改。
|
PID 执行出错
PID 执行出错
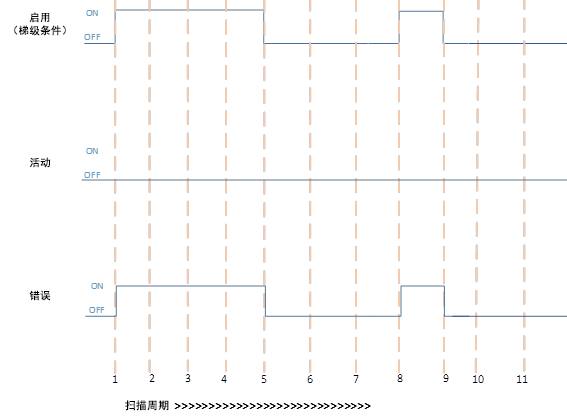
扫描周期 | 描述 |
|---|---|
1,8 | 在下列情况下梯级条件变为 TRUE:
|
2,3,4 | 梯级条件未发生更改。
|
5,9 | 在下列情况下梯级条件变为 FALSE:
|
6、7、10、11 | 梯级条件未发生更改。
|
PID 执行出错,然后执行成功
PID 执行出错,然后执行成功
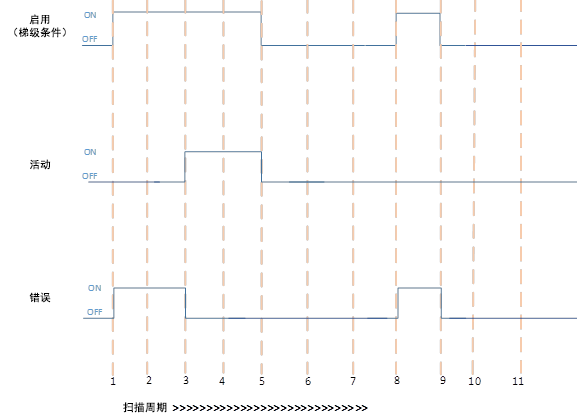
扫描周期 | 描述 |
|---|---|
1,8 | 在下列情况下梯级条件变为 TRUE:
|
2 | 梯级条件未发生更改。
|
3,4 | 梯级条件未发生更改。
|
5,9 | 在下列情况下梯级条件变为 FALSE:
|
6、7、10、11 | 梯级条件未发生更改。
|
PID 执行成功和错误
PID 执行成功和错误
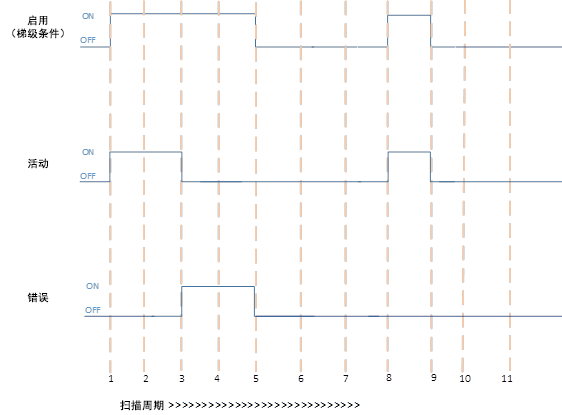
扫描周期 | 描述 |
|---|---|
1,8 | 在下列情况下梯级条件变为 TRUE:
|
2 | 梯级条件未发生更改。
|
3,4 | 梯级条件未发生更改。
|
5,9 | 在下列情况下梯级条件变为 FALSE:
|
6、7、10、11 | 梯级条件未发生更改。
|
提供反馈