PID(比例-积分-微分)
PID 是使用过程循环控制诸如温度、压力、液面或流速等物理属性的输出指令。
操作详细信息︰
- 在启用后,PID 将使用包括 PID 控制器的 SP 和 Gains 在内的输入参数来控制过程。
- “运行”到“编程”模式转换,PID 指令将禁用,参数值将保留。
- 编程到运行模式转换,PID 指令保持禁用状态,直到用户将 Enable 复位为 true。
支持的语言︰功能块图、梯形图和结构化文本。
该指令适用于 L20E、L50E 和 L70E 控制器。
PID
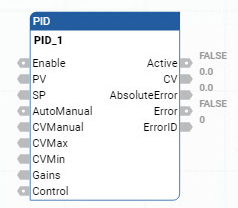
参数 | 参数类型 | 数据类型 | 描述 |
|---|---|---|---|
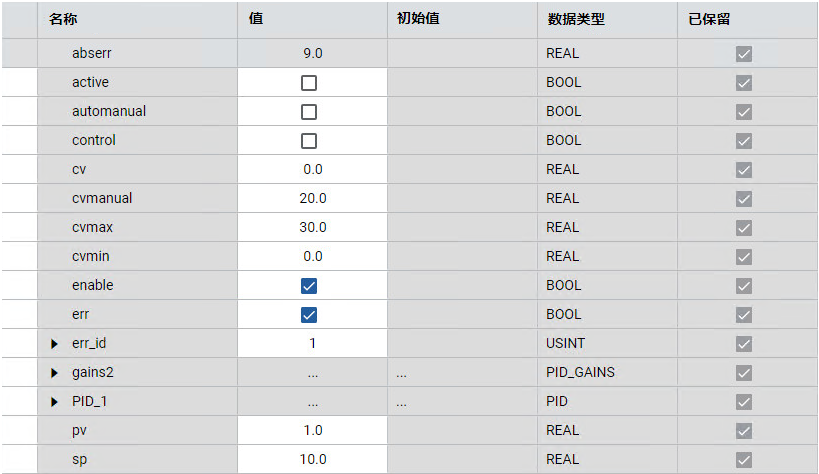
Enable | 输入 | BOOL | 启用指令。
|
PV | 输入 | REAL | 进程值。该值通常读取自模拟输入模块。 SI 单位必须与 Setpoint 相同。 |
SP | 输入 | REAL | 过程的设置点值。 |
AutoManual | 输入 | BOOL | 自动或手动模式选择。
|
CVManual | 输入 | REAL | 为手动模式操作定义的控制值输入。 CVManual 的有效范围为: CVMin < CVManual < CVMax。 |
CVMin | 输入 | REAL | 控制值的最小限值。
|
CVMax | 输入 | REAL | 控制值的最大限值。
|
Gains | 输入 | PID_GAINS | 控制器 PID 的增益。 使用 PID_GAINS 数据类型可配置 Gains 参数。 |
Control | 输入 | BOOL | 控制过程的方向:
|
Active | 输出 | BOOL | PID 控制器的状态。
|
CV | 输出 | REAL | 控制值输出。 如果发生任何错误,则 CV 为 0。 |
AbsoluteError | 输出 | REAL | 绝对误差是过程值 (PV) 和设置点 (SP) 值之间的差值。 |
Error | 输出 | BOOL | 表示存在错误条件。
|
ErrorID | 输出 | USINT | 标识错误的唯一数字。这些错误在 PID 错误代码中定义。 |
参数 | 参数类型 | 数据类型 | 描述 |
|---|---|---|---|
Kc | 输入 | REAL | PID 的控制器增益。 比例和积分取决于此增益。(>= 0.0001)。 增大 Kc 可提高响应时间性能,但也会增加 PID 的过冲和振荡。 如果 Kc 无效,则发生错误。 |
Ti | 输入 | REAL | 以秒为单位的时间积分常数 (>= 0.0001)。 增大 Ti 会降低 PID 的过冲和振荡。 如果 Ti 无效,则发生错误。 |
Td | 输入 | REAL | 以秒为单位的时间微分常数 (>= 0.0)。 当 Td 等于 0 时,不存在微分作用,PID 成为 PI 控制器。 增加 Td 会减少过冲,并消除 PID 控制器的振荡。 如果 Td 无效,则发生错误。 |
FC | 输入 | REAL | 滤波常数 (>= 0.0)。建议的 FC 范围为 0 至 20。 增大 FC 会平滑 PID 控制器的响应。 如果 FC 无效,则发生错误。 |
错误代码 | 错误描述 |
|---|---|
0 | PID 正常工作。 |
1 | Kc 无效。 |
2 | Ti 无效。 |
3 | Td 无效。 |
4 | FC 无效。 |
5 | CVMin > CVMax 或 CVMax < CVMin。 |
6 | CVManual < CVMin。 CVManual 无效。 |
7 | CVManual > CVMax。 CVManual 无效。 |
PID 示例
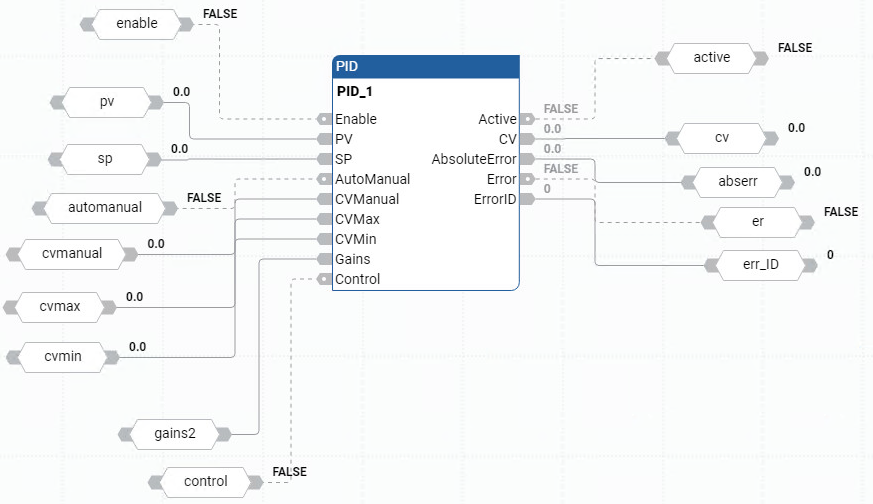
PID 功能块图示例
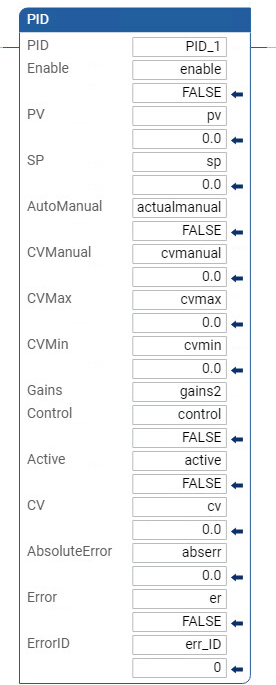
PID 梯形图示例
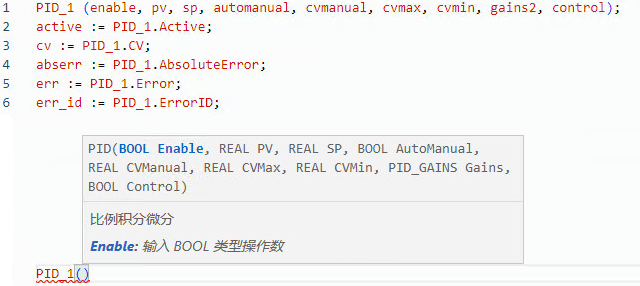
PID 结构化文本示例
结果
提供反馈