运动控制轴状态
当多个运动控制功能块均已激活时,高水平轴行为的基本规则是始终按顺序执行运动命令,即使控制器支持实时并行处理也是如此。任何运动命令都是一种使轴状态发生变化的转换,因此它可以修改当前运动的计算方式。
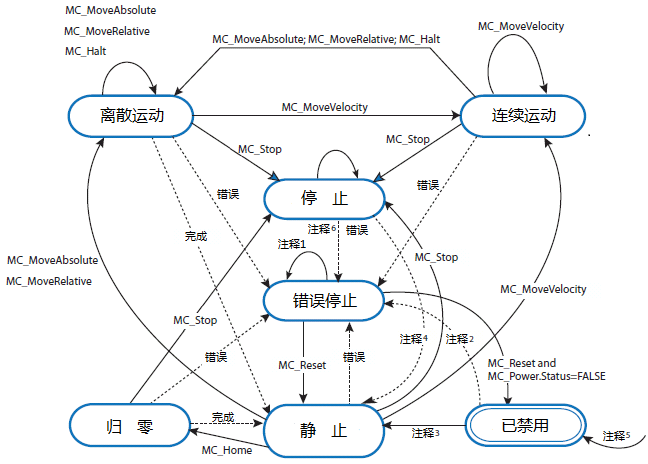
运动控制轴状态图
轴将始终处于下图所示的其中一个定义的状态。
运动控制轴状态图
运动控制轴状态行为
否 | 注意 |
|---|---|
1 | 在“错误停止”和“正在停止”状态下,所有功能块(除了 MC_Reset)均可调用,但不会执行。 MC_Reset 生成向“静止”状态的转换。如果在状态机器处于“正在停止”状态时出现错误,那么会生成向“错误停止”状态的转换。 |
2 | Power.Enable = TRUE 且轴中存在错误。 |
3 | Power.Enable = TRUE 且轴中不存在错误 |
4 | MC_Stop.Done AND NOT MC_Stop.Execute. |
5 | 当使用 Enable = FALSE 调用 MC_Power 时,轴的每个状态(包括“错误停止”)都会变为“已禁用”状态。 |
6 | 如果在状态机器处于“正在停止”状态时出现错误,那么会生成向“错误停止”状态的转换。 |
运动控制轴状态代码值
您可以使用“轴监视器”功能监视轴状态。
状态值 | 状态名称 |
|---|---|
0x00 | 已禁用 |
0x01 | 静止 |
0x02 | 离散运动 |
0x03 | 连续运动 |
0x04 | 原位 |
0x06 | 正在停止 |
0x07 | 错误停止 |
轴状态更新
在运动执行中,轴状态更新取决于 POU 扫描何时调用相关的运动功能块。即使运动配置由运动引擎作为后台任务进行控制,也是如此,并且与 POU 扫描无关。
例如,在梯形 POU(状态为 rung=true)的运动轴上,会扫描梯级中的 MC_MoveRelative 功能块,而轴将开始运动。在 MC_MoveRelative 完成前,梯级的状态会变为 FALSE,并且不再扫描 MC_MoveRelative。在此情况下,即使在轴完全停止后,速度变为 0,轴状态也不能从“离散运动”切换为“静止”。
提供反馈