Z
增益
输出信号与输入信号的幅值之比。
在线性方程 (y=mx+b) 中,参数 (m) 用于在自变量 (x) 达到最大值时将因变量 (y) 驱动到指定值。
增益错误
缩放因子或线的斜度与理想增益值或名义增益值的偏差。此偏差是以输入或输出值的百分比形式表示的。
提示: | 模拟输入或输出的增益是一个缩放因子,它提供名义转换关系。通常,这是线的斜度,此斜度是通过将模拟电压或电流与相应数字值进行对比绘制的。 |
占空因数
间歇工作设备的工作时间对总时间的比率(通常以百分比形式表示)。
整数 (INT)
由一个字组成的原子 data type,该字用来存储 16 位带符号整型值(-32,768 到 +32,767)。
整型
任何正整数、负整数或零。
正常 program
既不是加电处理 program,也不是 conroller 故障处理 program 的 program。
正常打开
继电器或开关上的触点,这些触点在继电器被断电或者开关被停用时打开;它们在继电器被加电或开关被激活时关闭。在梯形编程中,这是一个符号,当它被求值时,如果引用的输入是逻辑“0”,则允许逻辑继续(流动)。
正常关闭
继电器或开关上的触点,这些触点在继电器被断电或者开关被停用时关闭;它们在继电器被加电或开关被激活时打开。在梯形编程中,这是一个符号,当它被求值时,如果引用的输入是逻辑“1”,则允许逻辑继续(流动)。
正交
相位分隔 90 度。在反馈设备(如编码器和分解器)的信号通道中,正交用来检测运动方向。
正向 kinematics
由源位置确定目标位置的解决方案。在实践中,它将计算可确定结点位置的笛卡尔位置。
正向变换
由源位置确定目标位置的解决方案。
直接 I/O module
一种 I/O module,它的每个 input/output 都有单独的电路连接,从而直接与数据表位或字相对应。该位或字存储 I/O 电路(数字电路或模拟电路)中的信号值。这允许梯形逻辑直接访问 I/O 值。
直接命令
一种运行命令,它作为用户操作的结果从软件直接发送至 controller。这些命令不需要用户 program 启动就可以执行。
直接数据
在 SynchLink 协议环境中,直接数据是指每 50 毫秒传送一次的数据。通过正确配置的菊花链拓扑,可以在 500 毫秒内将直接数据传递到多达 10 个节点并能被这些节点检测到。
执行
通过处理一个指令、一系列指令或一个完整的 program 来完成操作。
执行模式
“Controller 管理器”中 program、文件和链接的层次结构(图形树),其中包含有关当前项目的所有信息;与“逻辑管理器”中显示的逻辑模式相对应。
执行时间
执行单个 program 所需的总时间。如果将 controller 配置为同时运行多个 task,则执行时间只包括该单个 program 使用的时间。不包括其它 task 中的 program 执行其它操作时使用/共享的时间。
执行序号
一个数字,它指示功能块在执行顺序中的位置。
指令
一个助记符和数据地址,它定义 controller 要执行的操作。Program 中的梯级由一组输入和输出指令组成。Controller 将输入指令求值为“真”或“假”。相应的,controller 将输出指令设置为“真”或“假”。
指令集
可用于给定 controller 的通用指令的集合。
指令签名
此签名是由软件所应用的一个属性,用以说明 Add-on 自定义指令在给定时间点的内容。它是 32 位 CRC 值(签名 ID)和上次编辑日期的日期/时戳(签名时戳)的组合,用于检测 Add-on 自定义指令中的更改。它在标准 Add-on 自定义指令和安全 Add-on 自定义指令中的用法相同。
指令首次扫描
指的是对数据结构的新实例第一次执行指令。Controller 使用指令首次运行来生成最初下载后不对功能块更改的系数和其它数据储备。
指令首次运行
指的是指令在预扫描后的第一次运行。Controller 使用指令首次扫描来读取当前输入并确定要处于的适当状态。
指数
以科学或指数格式记数法显示和输入的实数值。此数字总是显示为小数点左边有一位数字,后跟其它数字,然后再后跟指数。例如,123.45678 将显示为 1.2345678e+002。
只听
其它 controller 拥有此 module。此 controller 不会写入配置,并且只要存在主动对其进行控制的宿主 controller,它就会仅侦听此 module。
只听机架优化
一种 I/O 连接,其中,另一个 controller 拥有/提供 module 的配置数据。使用只听连接的 controller 不写配置。它只能在拥有者 controller 有效执行控制时与 module 建立连接。
中性文本
梯形图逻辑的一种文本格式,它不要求指令助记符是关键字,因此独立于处理器的指令集。这种格式使您能够以独立于指令集的方式来指定和交换逻辑信息。
中央处理器 (CPU)
可编程 controller 的决策和数据存储部分。
周期
循环操作完成一个完整循环所需的时间长度。例如,从循环波形中的一个点到该波形下一循环中的同一个点的时间长度。
周期 task
按固定时间间隔执行的任务,该时间间隔的范围是 0.1 毫秒到 2,000,000 毫秒,增量为 1 毫秒。
周期任务根据特定速率执行功能。当达到这个指定的时间周期的末尾时,该任务就会被触发。在触发时,该任务将中断任何低优先级 (Priority) 任务(连续任务、周期任务或事件任务)并从上到下执行或扫描一次对该任务指定的所有程序。在这次单次扫描之后,将触发输出更新,并且控制将返回到被中断的任务的中断位置。
小贴士:
在控制器 (Controller) 中可以存在多个周期任务,并且每个任务都被配置为按照独立的速率操作。
重试
将传输内容从一个点发送到另一个点的重复尝试。当最初的传输未成功时,就会执行重试。重试将重复执行到传输成功或达到最大限制为止。
主 CST
指定的 controller,单个机箱中的所有其它 module 将它们的协调系统时间 (CST) 值与此 controller 同步。
提示: | 只能将一个 controller 指定为主 CST。 |
主 routine
Program 中的一个 routine,此 routine 被配置为当 program 运行时首先执行。
主/次 DNS 服务器地址
这个配置选项允许服务器接受基于文本的地址并执行数据库查找操作,从而将该地址转换为可以由网络使用的 IP 地址。如果一条消息使用主机名地址,就必须以某种方式将该地址转换为 IP 地址,这样才能将该消息发送至目标控制器 (Controller)。如果对 controller 配置了 DNS 服务器地址,则将使用 DNS 服务器来获取主机名地址并将其转换为目标模块的 IP 地址,这样就可以发送消息了。默认情况下,这两个字段都设置为 0.0.0.0。
IP 地址的每个八位组都必须在 0 到 255 范围内。第一个八位组不能是 127 或大于 223。
主版本
对模块 (Module) 进行功能性变更。每次进行这样的变更后,主版本指示符都会进行更新。
主机名
主机名是标识网络中计算机的唯一名称。
在 Internet 上,主机名的格式为 comp.xyz.net。如果只有一个 Internet 站点,则主机名和域名相同。
如果一台计算机宿入多个 Internet 站点,则它可拥有多个主机名(例如,home.xyz.net 和 comp.xyz.net)。在这种情况下,home 和 comp 是主机名,xyz.net 是域名。
有效字符包括:
- 介于 0 - 9 之间的数字
- 介于 A - Z 之间的字母字符(大写或小写)
- 破折号
- 周期
- 不超过 64 个有效 ASCII 字符
- 主机名的第一个字符必须是字母字符(介于 A - Z 之间(大写或小写))
- 主机名的最后一个字符不能为句号或破折号
- 主机名中不能有两个相连的句号
合法主机名的示例包括:
- HostName.com
- HostName
- HostName.123
- Host-2-Name.com
- HostName.DomainName.com
- Host123Name456.789DomanName000.com
非法主机名的示例包括:
- .HostName.com
- HostName.com。
- HostName..com
- HostName.com-
- 123.com
- 1234567890
主控件重置 (MCR)
用于分隔 MCR 区域的梯形逻辑指令。
主控制机箱
一个控制机箱,它被指定为执行控制功能。主控制机箱可能有也可能没有次控制机箱。
主控制继电器 (MCR)
必需的硬布线继电器,它可以被任何串联的紧急停机开关断电。每当 MCR 被断电时,它的触点就会打开,从而将所有应用 I/O 设备断电。
主时钟
1588 时钟系统可分为由边界时钟分隔的多个区域。在每个区域内,均会有单个时钟(主时钟)作为主要时间源。而这些主时钟将会与其它主时钟同步,并最终与 grandmaster 时钟同步。
注册位置
最初当注册输入被触发时在专用硬件中捕获到的 axis 位置。在校准 axis 以及将 axis 与真实世界位置同步时,可以使用此位置。
助记符
用来代表复杂或冗长的一组信息的词汇。
注释
与项目中的各个项相关联的用户文本,这些文本用来说明该项的用途。Logix Designer 项目中的大多数项均支持用户注释。这包括 Task、Program、Routine、梯级、Tag、用户定义的结构、用户定义的结构成员和 Module。注释不会以任何方式影响用户 program 的操作。
转换
笛卡尔(即 3D)空间中的线性移动或偏移量的机械术语。转换描述了两个笛卡尔点之间的距离。
转换 (Transition)
将状态由“关”状态更改为“开”状态,反之亦然。
状态
电路或系统的状态,以逻辑 0(关)或逻辑 1(开)表示。
此术语还可用于描述模块 (Module) 状态,如下所示:
此状态: | 指示: |
备用 | 关闭时出现的瞬时状态 |
故障 | 控制器 (Controller) 无法与模块 (Module) 通信 状态为“发生故障”时,“连接”选项卡将显示该故障。 |
验证 | 连接到模块前出现的瞬时状态 |
连接 | 与模块建立连接时出现的状态 |
正在运行 | 模块正在进行通信,一切正常 |
关闭 | 连接正在关闭 |
已禁用 | 与模块的连接已被禁用 |
等待 | 由于以下原因之一,与该模块的连接未建立:
|
脱机 | 未联机 |
子 routine
一个 routine,另一个 routine 通过使用 JSR 指令调用此 routine。它必须以 SBR 指令开头并至少包含一个 RET 指令。
自变量
自变量包含由用户 program 中的指令使用的数据的规格。自变量可包含:
- 简单 tag (例如 LS101)
- tag 结构引用(例如 Recipe.Temperature)
- 直接数组引用(例如 Buffer[1])
- 间接数组引用(例如 Buffer[Index+1])
- 组合(例如 Buffer[Index+1].Delay)
- 字面值(例如 5)
自动导引
一种根据已知位置对 axis 进行校准的方法。这种方法通常包括将 axis 移至某个可以使用外部传感器和输入进行验证的物理位置。然后,系统对此位置中的 axis 指定预定义的位置。
自动导引顺序
用来指定是否使用导引限制开关和/或编码器标志来将 axis 定位到已知位置(当“自动导引”模式处于活动状态时)。顺序类型可以包括:立即设置位置、移动到外部开关触发为止、移动到电机的内部标志触发为止或者先使用外部开关接着使用内部标志。
自动导引位置
所有绝对定位移动的参考位置,通常由自动导引限制开关和编码器标志定义。它通常是在加电时设置的,并且在控制系统工作期间保持不变。
字段
由原子 data type、结构或一维数组组成的结构内的单个数据定义。
字符串
一种带有两个成员的 user-defined data type。第一个成员是一个 DINT,它存储使用中的字符数。第二个成员是一个长度可配置的 SINT 数组,它存储字符串的字符数据。
字长
一个字中的位数。在可编程 controller 中(除非另有所指),一个字有 16 个数据位。
子网掩码
子网寻址是对 IP 地址方案的扩展,它允许站点对多个物理网络使用单个网络标识。通过使用类将 IP 地址划分为网络标识和主机标识,站点外部的路由可以继续进行。在站点内部,使用子网掩码来将 IP 地址进一步划分为自定义网络标识部分和主机标识部分。默认情况下,此字段设置为 0.0.0.0。
例如,使用 Network 2(B 类网络)并添加另一个物理网络。选择以下子网掩码将添加两个附加的网络标识位,从而支持 4 个物理网络:
11111111 11111111 11000000 00000000 = 255.255.192.0
B 类主机 ID 的两个位已用于扩展网络 ID。子网掩码位为 1 的主机 ID 部分的每个唯一的位组合均指定不同的物理网络。新的配置是:
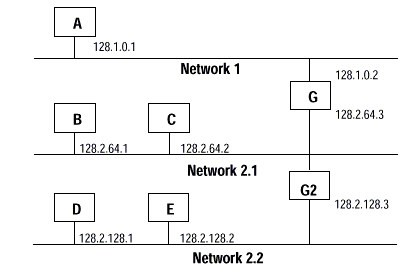
添加了第二个网络,该网络带有主机 D 和 E。网关 G2 将 Network 2.1 与 Network 2.2 连接到一起。主机 D 和 E 将使用网关 G2 来与不在 Network 2.2 中的主机通信。主机 B 和 C 将使用网关 G 来与不在 Network 2.1 中的主机通信。当 B 与 D 通信时,G(B 的已配置的网关)将通过 G2 把数据从 B 发送到 D。
最低有效数字 (LSD)
一个数字,它表示数字串中的最小值。
最低有效位 (LSB)
一个位,它表示数字串中的最小值。
最高有效数字 (MSD)
表示数字串中的最大值的数字。
最高有效位 (MSB)
表示位串中的最大值的位。
最佳主时钟算法
最佳主时钟算法用于自动选择技术上最佳的时钟。如果某个时钟明显是更好的时间源(如基于 GPS 的时钟),并且所有设备均处于默认设置状态,则系统很可能会选择此时钟作为 grandmaster 时钟。
提供反馈