过程类型指令
过程类型的运动指令用于启动所需完成时间不确定的运动过程。
过程类型指令的示例包括:
- 运动装备监视位置 (MAW) 指令
- 运动轴运动 (MAM) 指令
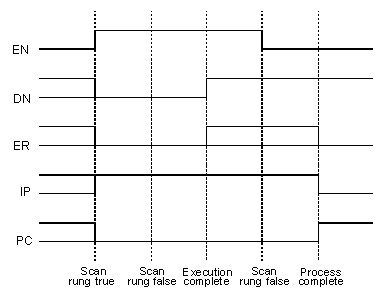
过程类型指令的工作方式如下:
- 当包含运动指令的梯级变为真时,控制器:
- 将使能 (.EN) 位置位。
- 将完成 (.DN) 位清零。
- 将错误 (.ER) 位清零。
- 将过程完成 (.PC) 位清零。
- 控制器启动运动过程。若:则控制器:控制器执行指令时未检测到错误
- 将 .DN 位置位。
- 将正在处理 (.IP) 位置位。
控制器执行指令时检测到错误- 将 .ER 位置位。
- 将错误代码存储在控制结构中。
- 不更改 .IP 和 .PC 位。
控制器检测到运动指令的另一个实例将该实例的 .IP 位清零。运动过程达到可以再次执行指令的点将 .DN 位置位。提示:对于某些过程类型的指令(如 MAM),该情况发生在第一次扫描过程中。对于其他类型(如 MAH),.DN 位在整个归零过程完成后置位。运动过程中发生以下情况之一:- 运动过程完成
- 指令的另一个实例执行
- 另一条指令停止运动过程
- 运动故障停止运动过程
- 将 .DN 位置位。
- 将 .PC 位置位。
- 将 .IP 位清零。
- 一旦运动过程启动完成,即可继续进行程序扫描。提醒事项:指令和控制过程的其余部分将与程序扫描一并继续执行。
- 在 .DN 位或 .ER 位置位后,当梯级再次变为假时,控制器将 .EN 位清零。
- 梯级变为真时,指令可再次执行。
提供反馈