使用 PID 指令
输入 PID 指令并指定 PID 结构后,可使用配置选项卡指定 PID 指令的工作方式。
指定调谐方式
选择“调节”选项卡。 当您选择另一个字段,选择
确定
,选择应用
或按下 Enter
时,更改立即生效。在此字段中: | 执行以下操作: |
|---|---|
设置点 (SP) | 输入设置点值 (.SP)。 |
设置输出百分比 | 输入设置输出百分比 (.SO)。 在软件手动模式下,此值用于输出。在自动模式下,此值显示输出百分比。 |
输出偏置 | 输入输出偏置百分比 (.BIAS)。 |
比例增益 (Kp) (Proportional gain (Kp)) | 输入比例增益 (.KP)。 对于独立增益,它是比例增益(无单位)。对于关联增益,它是控制器增益(无单位)。 |
积分增益 (Ki) (Integral gain (Ki)) | 输入积分增益 (.KI)。 对于独立增益,它是积分增益(1/秒)。 对于关联增益,它是重置时间(分钟/循环)。 |
微分时间 (Kd) (Derivative time (Kd)) | 输入微分增益 (.KD)。 对于独立增益,它是微分增益(秒)。对于关联增益,它是比率时间(分钟)。 |
手动模式 (Manual mode) | 选择手动 (.MO) 或软件手动 (.SWM)。 如果同时选择二者,手动模式将优先于软件手动模式。 |
指定配置
选择“配置”(Configuration) 选项卡。您必须选择
确定
或应用
,所做更改才会生效。在此字段中: | 执行以下操作: |
|---|---|
PID 等式 (PID equation) | 选择独立增益或关联增益 (.PE)。 若要三个增益(P、I 和 D)独立工作,可使用独立增益。若要控制器总体增益影响全部三项(P、I 和 D)时,使用关联增益。 |
控制操作 (Control action) | 选择 E=PV-SP 或 E=SP-PV 作为控制操作 (.CA)。 |
微分对象 | 选择 PV 或误差 (.DOE)。 使用 PV 的微分可降低设置点变化引起的输出尖峰危险。如果算法可以容忍超调量,使用误差的微分可快速响应设置点的变化。 |
回路更新时间 (Loop update time) | 输入指令的更新时间 (.UPD)。 |
CV 上限 (CV high limit) | 输入控制变量的上限 (.MAXO)。(1) |
CV 下限 (CV low limit) | 输入控制变量的下限 (.MINO)。(1) |
死区值 (Deadband value) | 输入死区值 (.DB)。 |
禁止微分平滑 (No derivative smoothing) | 启用或禁用此选项 (.NDF)。 |
禁止偏置计算 | 启用或禁用此选项 (.NOBC)。 |
禁用死区过零 (No zero crossing in deadband) | 启用或禁用此选项 (.NOZC)。 |
PV 跟踪 (PV tracking) | 启用或禁用此选项 (.PVT)。 |
级联回路 | 启用或禁用此选项 (.CL)。 |
级联类型 (Cascade type) | 如果已启用级联回路,则选择从回路或主回路 (.CT)。 |
(1) 使用基于梯形图的 PID 指令时,如果设置 MAXO = MINO,PID 指令会将这些值复位为默认值。MAXO = 100.0,MINO = 0.0
指定报警
选择
报警
(Alarms) 选项卡。选择确定
或应用
,所做更改才会生效。在此字段中: | 执行以下操作: |
|---|---|
PV 上限 (PV high) | 输入 PV 报警上限值 (.PVH)。 |
PV 下限 (PV low) | 输入 PV 报警下限值 (.PVL)。 |
PV 死区 (PV deadband) | 输入 PV 报警死区值 (.PVDB)。 |
正偏差 (Positive deviation) | 输入正偏差值 (.DVP)。 |
负偏差 (Negative deviation) | 输入负偏差值 (.DVN)。 |
偏差死区 | 输入偏差报警死区值 (.DVDB)。 |
指定标定
选择“标定”(Scaling) 选项卡。您必须选择
确定
或应用
,所做更改才会生效。在此字段中: | 执行以下操作: |
|---|---|
PV 未标定最大值 (PV unscaled maximum) | 输入最大 PV 值 (.MAXI),此值等于从 PV 值的模拟输入通道接收的最大未标定值。 |
PV 未标定最小值 (PV unscaled minimum) | 输入最小 PV 值 (.MINI),此值等于从 PV 值的模拟输入通道接收的最小未标定值。 |
PV 工程单位最大值 (PV engineering units maximum) | 输入与 .MAXI (.MAXS) 相对应的最大工程单位 |
PV 工程单位最小值 (PV engineering units minimum) | 输入与 .MINI (.MINS) 相对应的最小工程单位 |
CV 最大值 (CV maximum) | 输入与 100% 相对应的最大 CV 值 (.MAXCV)。 |
CV 最小值 (CV minimum) | 输入与 0% 相对应的最小 CV 值 (.MINCV)。 |
最大牵引值 (Tieback maximum) | 输入最大牵引值 (.MAXTIE),此值等于从牵引值模拟输入通道接收的最大未标定值。 |
最小牵引值 (Tieback minimum) | 输入最小牵引值 (.MINTIE),此值等于从牵引值模拟输入通道接收的最小未标定值。 |
PID 已初始化 (PID Initialized) | 如果在运行模式下更改标定常数,则禁用此选项,以重新初始化内部反标定值 (.INI)。 |
小贴士:
使用基于梯形图的 PID 指令时,如果设置 MAXO = MINO,PID 指令会将这些值复位为默认值。MAXO = 100.0,MINO = 0.0。
使用 PID 指令
PID 闭环控制可将过程变量保持在预定的设置点。下图所示为流速/液位控制示例。
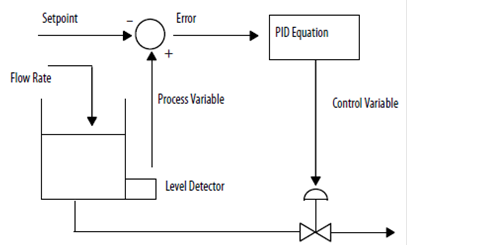
在上例中,将罐中的液位与设置点相比较。如果液位高于设置点,PID 等式将增大控制变量,并使罐的出口阀打开;从而降低罐中的液位。
PID 指令中使用的 PID 等式是一个可以选择使用独立增益或关联增益的位置形式等式。使用独立增益时,比例、积分和微分增益仅分别影响其特定的比例、积分或微分项。使用关联增益时,比例增益替换为影响所有这三项的控制器增益。可使用任何一种形式的等式来执行同类型的控制。提供这两种等式的目的仅仅在于,支持用户选择使用自己熟悉的等式类型。
增益选项 | 微分对象 |
|---|---|
关联增益 (ISA 标准) | 误差 (E) |
过程变量 (PV) | |
独立增益 | 误差 (E) |
过程变量 (PV) |
其中:
变量 | 说明 |
|---|---|
KP | 比例增益(无单位),Kp = Kc(无单位) |
Ki | 积分增益(秒 -1) 要在 Ki(积分增益)和 Ti(复位时间)之间进行转换,请参见转换公式: |
Kd | 微分增益(秒) 要在 Kd(微分增益)和 Td(比率时间)之间进行转换,可使用:Kd = Kc (Td) 60 |
KC | 控制器增益(无单位) |
Ti | 复位时间(分钟/循环) |
Td | 比率时间(分钟) |
SP | 设置点 |
PV | 过程变量 |
E | 误差,[(SP-PV) 或 (PV-SP)] |
BIAS | 前馈或偏置 |
CV | 控制变量 |
dt | 回路更新时间 (Loop update time) |
转换公式

如果不想使用 PID 等式的特定项,只需将其增益设置为零。例如,如果不需要微分作用,可将 Kd 或 Td 设置为零。
提供反馈