设置死区 (PID)
使用可调整死区,用户可以在设置点上下选择一个误差范围,只要误差保持在此范围内,输出就不会改变。这种死区有助于用户控制过程变量与设置点的匹配程度,而不会改变输出。死区还有助于最大程度地降低最终控制设备的磨损。
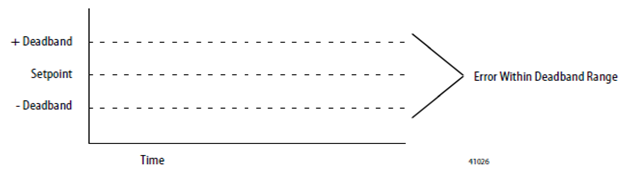
过零是一种死区控制功能,当过程变量进入死区时,过零功能允许指令将误差用于计算,直到过程变量经过设置点。一旦过程变量经过设置点(误差过零并改变符号),只要过程变量仍处于死区内,输出就不会改变。
死区按用户指定的值基于设置点向上和向下扩展。输入零可禁用死区。死区与设置点具有相同的标定单位。若选择
配置
(Configuration) 选项卡上的禁用死区过零
(No zero crossing for deadband) 选项或将 PID 结构中的 .NOZC 位置位,可使用无过零功能的死区。如果要使用死区,Control variable 必须采用 REAL 类型,否则当误差处于死区范围内时,该值将被强制为零。
若要禁用死区:
- 输入零 (0)。
死区与设置点具有相同的标定单位。
若要使用无过零功能的死区:
- 可选择配置(Configuration) 选项卡上的禁用死区过零(No zero crossing for deadband) 选项,或将 PID 结构中的 .NOZC 位置位。
如果要使用死区,Control variable 必须采用 REAL 类型,否则当误差处于死区范围内时,该值将被强制为 0。
提供反馈