控制比率 (PID)
使用以下参数可使两个值之间的比率保持恒定:
- 非受控值
- 受控值(PID 指令使用的结果设置点)
- 这两个值之比
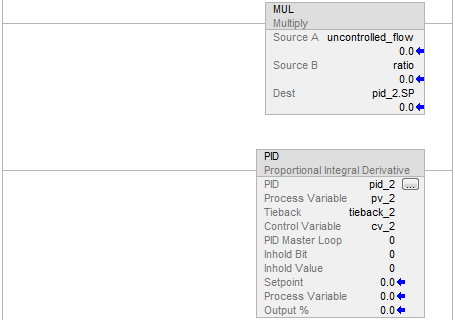
梯形图
小贴士:
为避免以无效内部浮点值将 PID 锁定,请确保 PV 不是 INF 或 NAN 值,然后再调用指令,例如:
- XIC (PC_timer.DN)
- MOV(Local:0:1.Ch0Data, Local:0:1.Ch0Data)
- XIO(S:V)
- PID(...)
结构化文本
pid_2.sp := uncontrolled_flow * ratio
PID(pid_2,pv_2,tieback_2,cv_2,0,0,0);
小贴士:
为避免以无效内部浮点值将 PID 锁定,请确保 PV 不是 INF 或 NAN 值,然后再调用指令,例如:
- XIC (PC_timer.DN)
- MOV(Local:0:1.Ch0Data, Local:0:1.Ch0Data)
- XIO(S:V)
- PID(...)
对于此参数 | 输入此值 |
|---|---|
Destination | 受控值 |
Source A | 非受控值 |
Source B | 比率 |
提供反馈