AXIS_SERVO_DRIVE 示意图
AXIS_SERVO_DRIVE 示意图包括:
- 电机位置伺服
- 辅助位置伺服
- 双位置伺服
- 电机双命令伺服
- 辅助双命令伺服
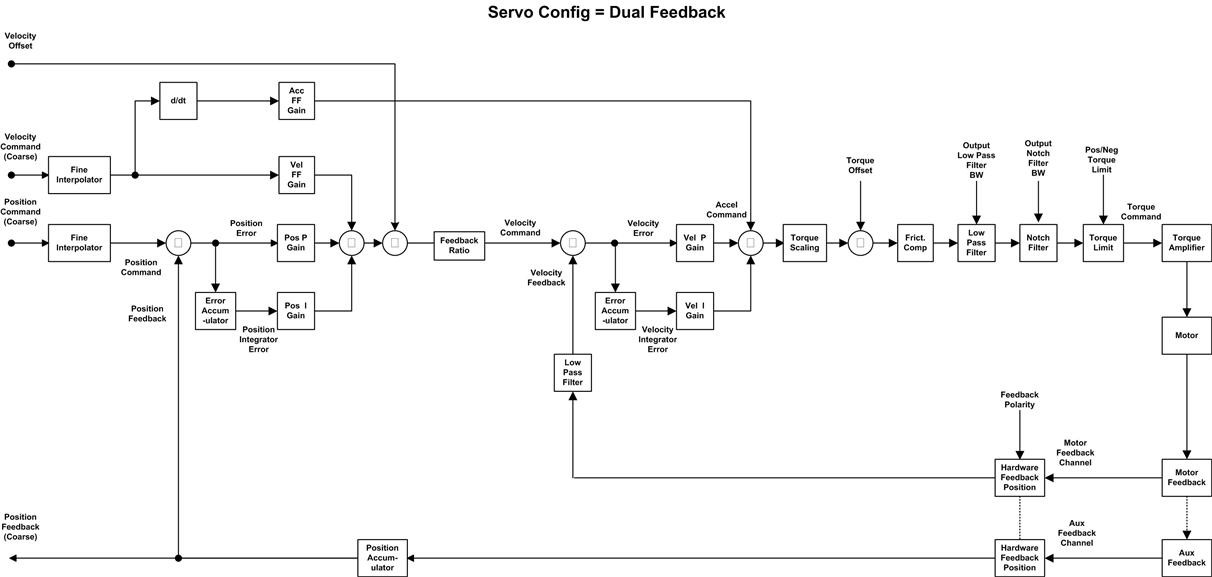
- 双命令反馈伺服
- 速度伺服
- 转矩伺服
- 驱动器增益
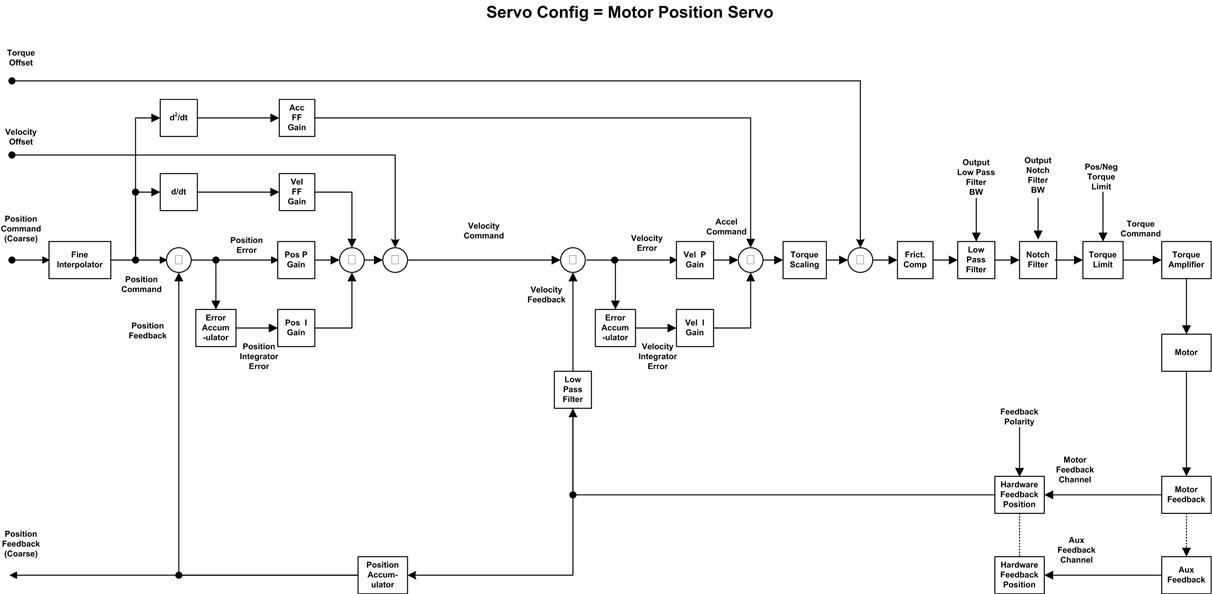
电机位置伺服
电机位置伺服配置仅使用电机中安装的反馈设备来提供位置和速度反馈,从而实现完整的位置伺服控制。这种伺服配置适用于对平滑性与稳定性的要求高于定位精准性的应用场合。在这种配置中,由于控制器无法对电机外部机械装置中的非线性因素进行补偿,因此定位精准性受到限制。
值得注意的是,电机中安装的反馈设备还可提供完成换向所必需的电机位置信息。伺服环的同步输入数据包括给定位置、速度偏移和转矩偏移。这些值按相关运动组的近似更新速率进行更新。
给定位置值直接由运动轨迹规划器的输出提供,而速度偏移和转矩偏移值则来自相应属性的当前值。这些偏移属性可通过 SSV 指令或直接标签访问以编程方式进行更改,这种方式与未来的功能块程序相结合,实现自定义的“外”控制环控制。
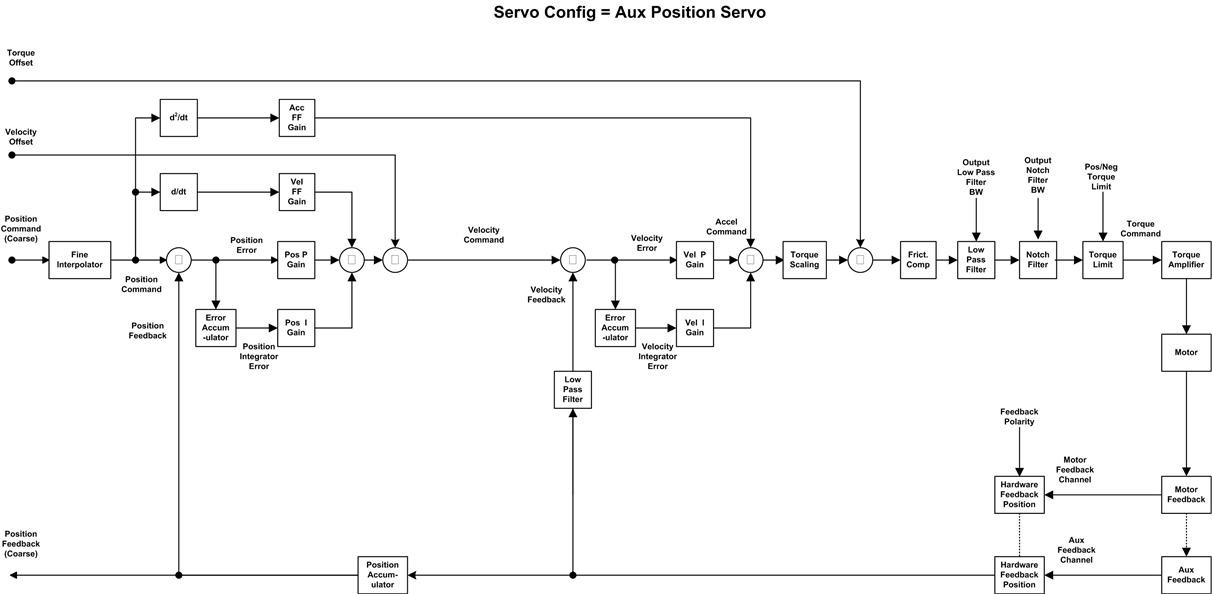
辅助位置伺服
辅助位置伺服配置使用辅助(即电机外部)反馈设备来提供位置和速度反馈,从而实现完整的位置伺服控制。这种伺服配置适用于对定位精准性要求较高的应用场合。但由于电机外部存在机械非线性因素,因此其平滑性和稳定性可能有限。
值得注意的是,这种配置仍需通过电机中安装的反馈设备来提供完成换向所必需的电机位置信息。伺服环的同步输入数据包括给定位置、速度偏移和转矩偏移。这些值按相关运动组的近似更新速率进行更新。
给定位置值直接由运动轨迹规划器的输出提供,而速度偏移和转矩偏移值则来自相应属性的当前值。这些偏移属性可通过 SSV 指令或直接标签访问以编程方式进行更改,这种方式与未来的功能块程序相结合,实现自定义的“外”控制环控制。
双位置伺服
这种配置使用辅助反馈设备提供位置反馈,而使用电机中安装的反馈设备提供速度反馈,从而实现完整的位置伺服控制。这种伺服配置将辅助位置伺服的定位精准性与电机位置伺服配置的平滑性与稳定性融合在一起。
值得注意的是,电机中安装的反馈设备还可提供完成换向所必需的电机位置信息。伺服环的同步输入数据包括给定位置、速度偏移和转矩偏移。这些值按相关运动组的近似更新速率进行更新。
给定位置值直接由运动轨迹规划器的输出提供,而速度偏移和转矩偏移值则来自相应属性的当前值。这些偏移属性可通过 SSV 指令或直接标签访问以编程方式进行更改,这种方式与未来的功能块程序相结合,实现自定义的“外”控制环控制。

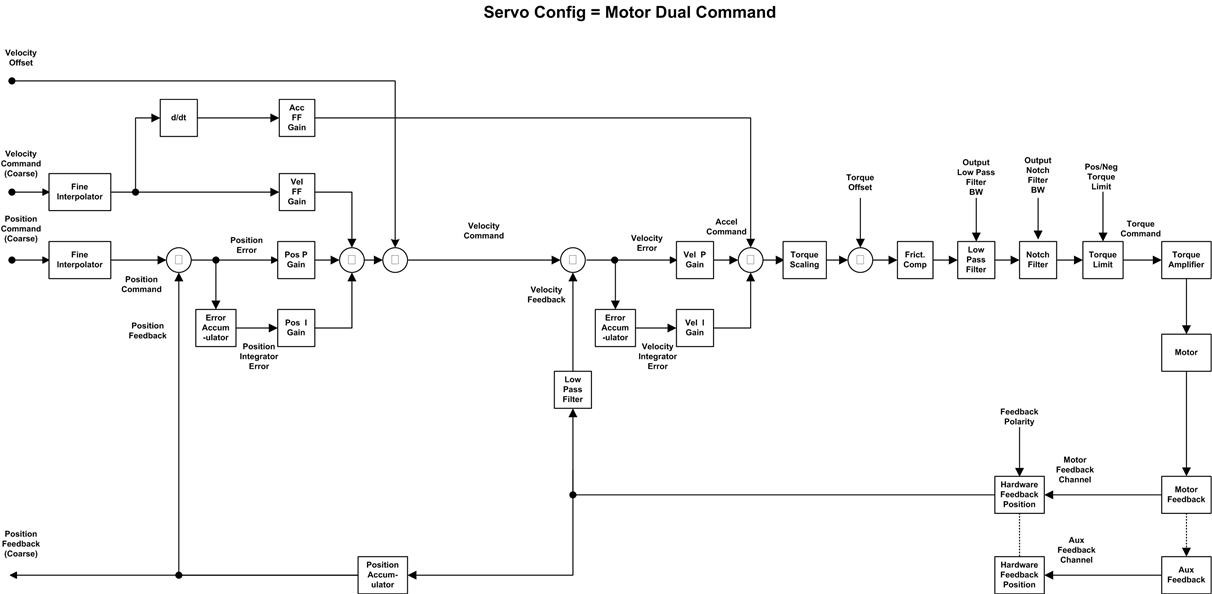
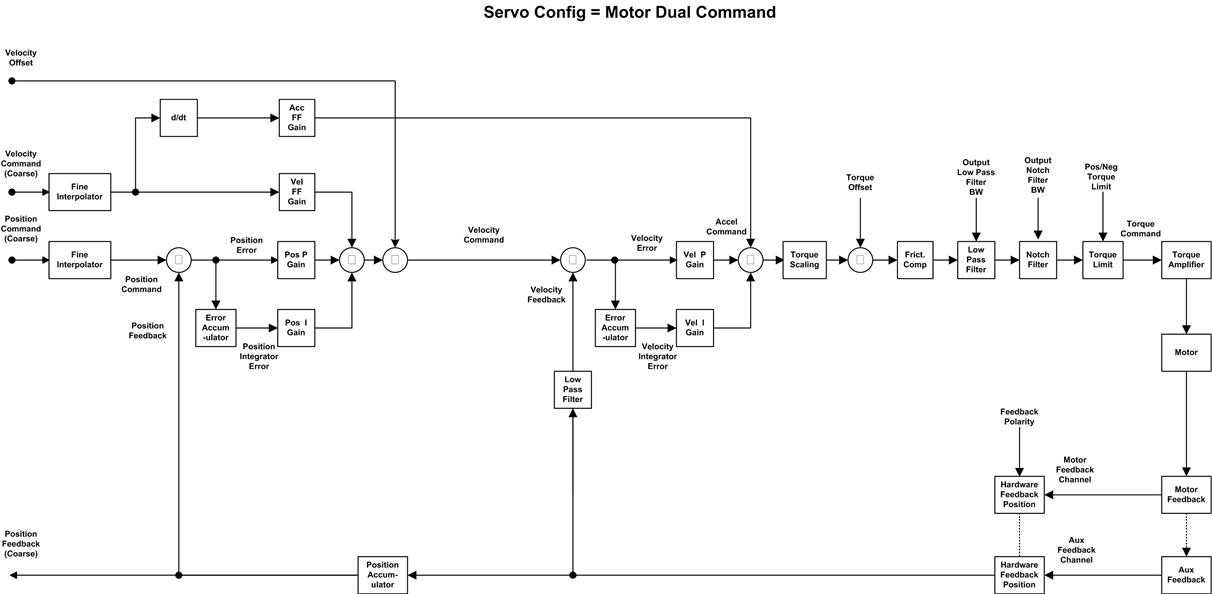
电机双命令伺服
电机双命令伺服配置仅使用电机中安装的反馈设备来提供位置和速度反馈,从而实现完整的位置伺服控制。但与电机位置伺服配置不同,这种配置将给定位置和给定速度同时应用于回路中,以获得更加平滑的前馈行为。这种伺服配置适用于对平滑性与稳定性要求较高的应用场合。在这种配置中,由于控制器无法对电机外部机械装置中的非线性因素进行补偿,因此定位精准性受到限制。
值得注意的是,电机中安装的反馈设备还可提供完成换向所必需的电机位置信息。伺服环的同步输入数据包括给定位置、给定速度和转矩偏移。这些值按相关运动组的近似更新速率进行更新。
给定位置和给定速度值直接由运动轨迹规划器的输出提供,而速度偏移值则来自相应属性的当前值。速度偏移属性可通过 SSV 指令或直接标签访问以编程方式进行更改,这种方式与未来的功能块程序相结合,实现自定义的“外”控制环控制。
辅助双命令伺服
辅助双命令伺服配置仅使用辅助设备中安装的反馈设备来提供位置和速度反馈,从而实现完整的位置伺服控制。但与辅助位置伺服配置不同,这种配置将给定位置和给定速度同时应用于回路中,以获得更加平滑的前馈行为。这种伺服配置适用于对定位精准性和前馈性能要求较高的应用场合。但由于电机外部存在机械非线性因素,因此其平滑性和稳定性可能有限。
值得注意的是,这种配置仍需通过电机中安装的反馈设备来提供完成换向所必需的电机位置信息。伺服环的同步输入数据包括给定位置、给定速度和转矩偏移。这些值按相关运动组的近似更新速率进行更新。
给定位置和给定速度值直接由运动轨迹规划器的输出提供,而速度偏移值则来自相应属性的当前值。速度偏移属性可通过 SSV 指令或直接标签访问以编程方式进行更改,这种方式与未来的功能块程序相结合,实现自定义的“外”控制环控制。
双命令反馈伺服
电机双命令反馈伺服配置使用辅助反馈设备提供位置反馈,而使用电机中安装的反馈设备提供速度反馈,从而实现完整的位置伺服控制。但与双反馈伺服配置不同,这种配置将给定位置和给定速度同时应用于回路中,以获得更加平滑的前馈行为。这种伺服配置适用于对平滑性、稳定性及定位精准性都要求较高的应用场合。
值得注意的是,这种配置仍需通过电机中安装的反馈设备来提供完成换向所必需的电机位置信息。伺服环的同步输入数据包括给定位置、给定速度和转矩偏移。这些值按相关运动组的近似更新速率进行更新。
给定位置和给定速度值直接由运动轨迹规划器的输出提供,而速度偏移值则来自相应属性的当前值。速度偏移属性可通过 SSV 指令或直接标签访问以编程方式进行更改,这种方式与未来的功能块程序相结合,实现自定义的“外”控制环控制。
速度伺服
速度伺服配置利用电机中安装的反馈设备来提供速度伺服控制。伺服环的同步输入数据包括给定速度、速度偏移和转矩偏移。这些值按相关运动组的近似更新速率进行更新。给定速度值直接由运动轨迹规划器的输出提供,而速度偏移和转矩偏移值则来自相应属性的当前值。这些偏移属性可通过 SSV 指令或直接标签访问以编程方式进行更改,这种方式与未来的功能块程序相结合,实现自定义的“外”控制环控制。
转矩伺服
转矩伺服配置利用电机中安装的反馈设备实现换向,从而提供转矩伺服控制。伺服环的同步输入数据仅包括转矩偏移。该值按相关运动组的近似更新速率进行更新。
转矩偏移值来自相应属性的当前值。该偏移属性可通过 SSV 指令或直接标签访问以编程方式进行更改,这种方式与未来的功能块程序相结合,实现自定义的“外”控制环控制。
驱动器增益
Rockwell Automation
伺服驱动器采用如上面框图所示的嵌套式数字伺服控制环,该环路通常由一个具有比例、积分和前馈增益的位置环组成,位置环围绕数字合成内部速度环,而速度环每个轴同样具有比例和积分增益。通过这些增益,可以实现伺服动力学的软件控制,并赋予伺服系统完全的稳定性。与模拟伺服控制器不同,这些以数字方式设置的增益不会产生漂移。此外,一旦为特定系统设置了这些增益,如果再以这些增益值编程其他 SERCOS 模块,其工作状况将与原始模块完全相同。
提供反馈